I built arducopter from your fork with “In-flight dynamic FFT analysis” for my quad with revo-mini, 3inch props, 1104 5400KV motors and 2S battery.
Follows images with FFT in 3 cases
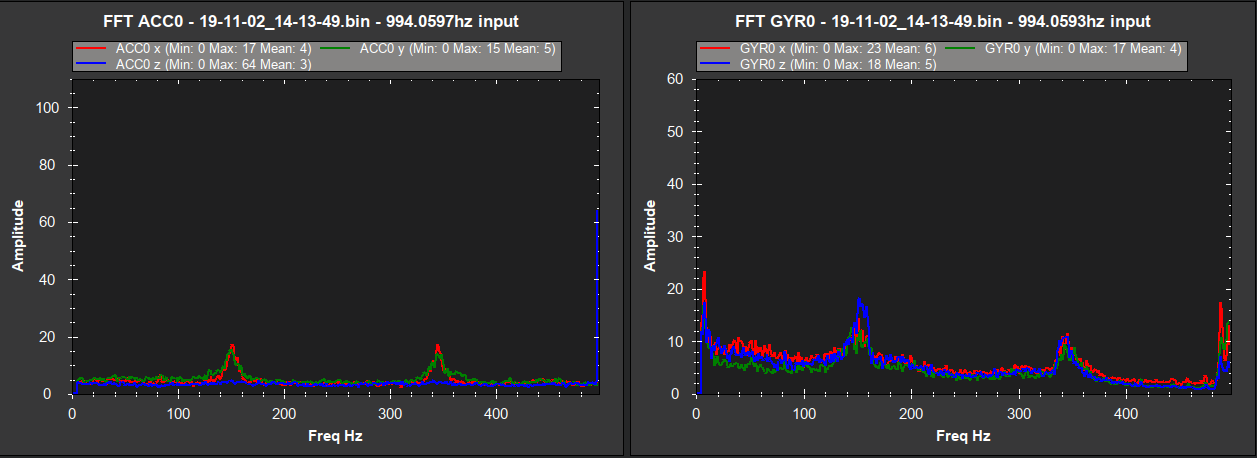
pre-filter
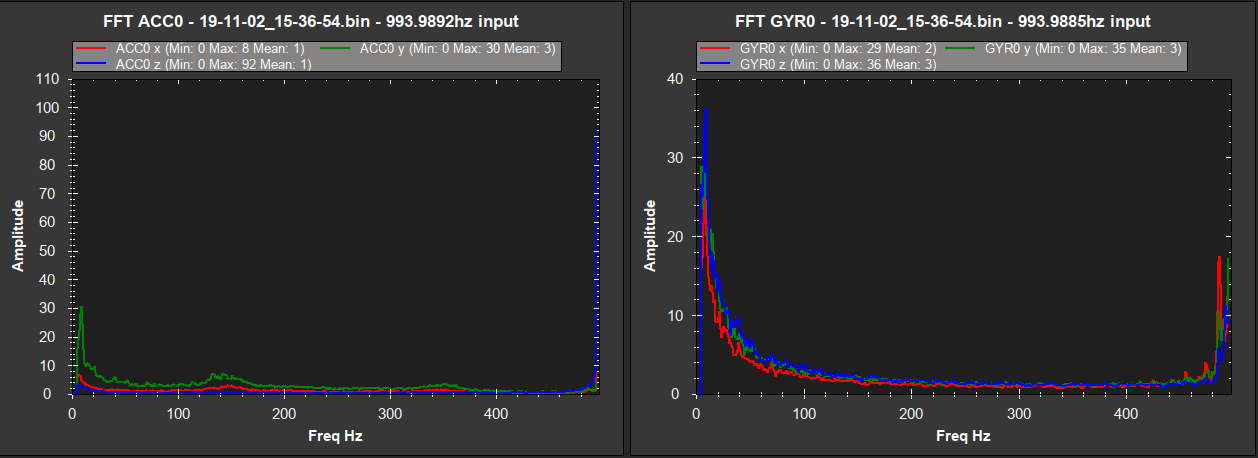
post-filter with INS_HNTCH_MODE=1
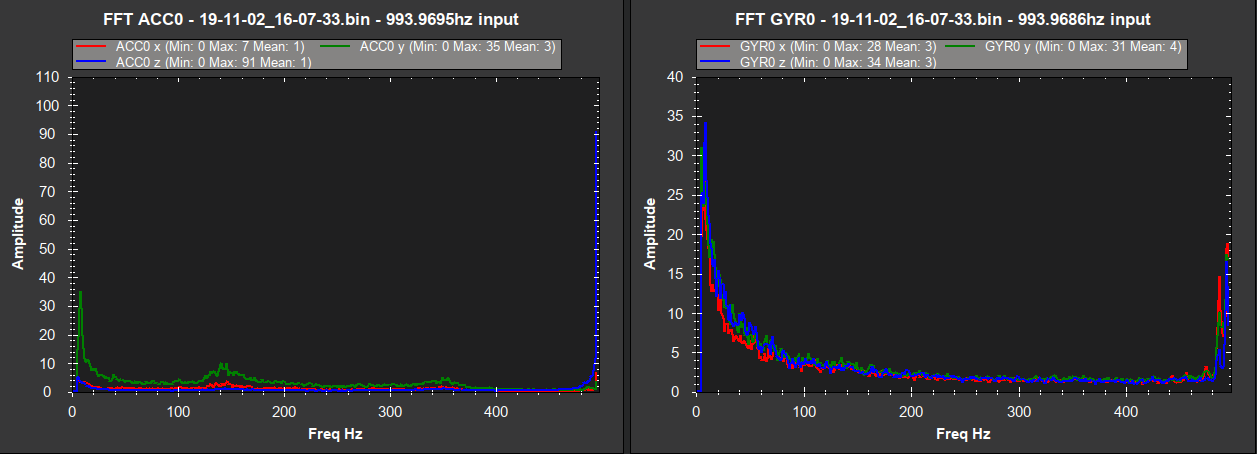
post-filter with INS_HNTCH_MODE=4
Viewing the pre-filter FFT I set a notch at 150Hz and an harmonic notch at 350Hz and I tested both throttle based and FFT based.
I think it is all working good because now I have a really stable quad even with PID tuned by hand.
The only thing that doesn’t work is that I never see the learned values on the FFT params.
I attach two logs one with INS_HNTCH_MODE=1 and one with INS_HNTCH_MODE=4
log1
log2