Hi all
I have a MicroArducopter with 3" props that I tuned with my experience and following the hints on this thread and the wiki page from @Leonardthall .
I obtained a good flying Microcopter both in STABILEZE, ALTHOLD, LOITER and GUIDED (also indoor with aruco marker http://ardupilot.org/dev/docs/ros-aruco-detection.html).
Recently one of my ESC (DYS XM10 non_S non_32 maximum Oneshot125) died and so I changed all 4 with 4 in 1 Turnigy Multistar BLheli_32.
Now I have a BIG problem: with the same frame, same motor, same everything except the ESC my quad is OK only in STABILIZE mode but if I try to switch in ALTHOLD the copter goes to the roof like a rocket.
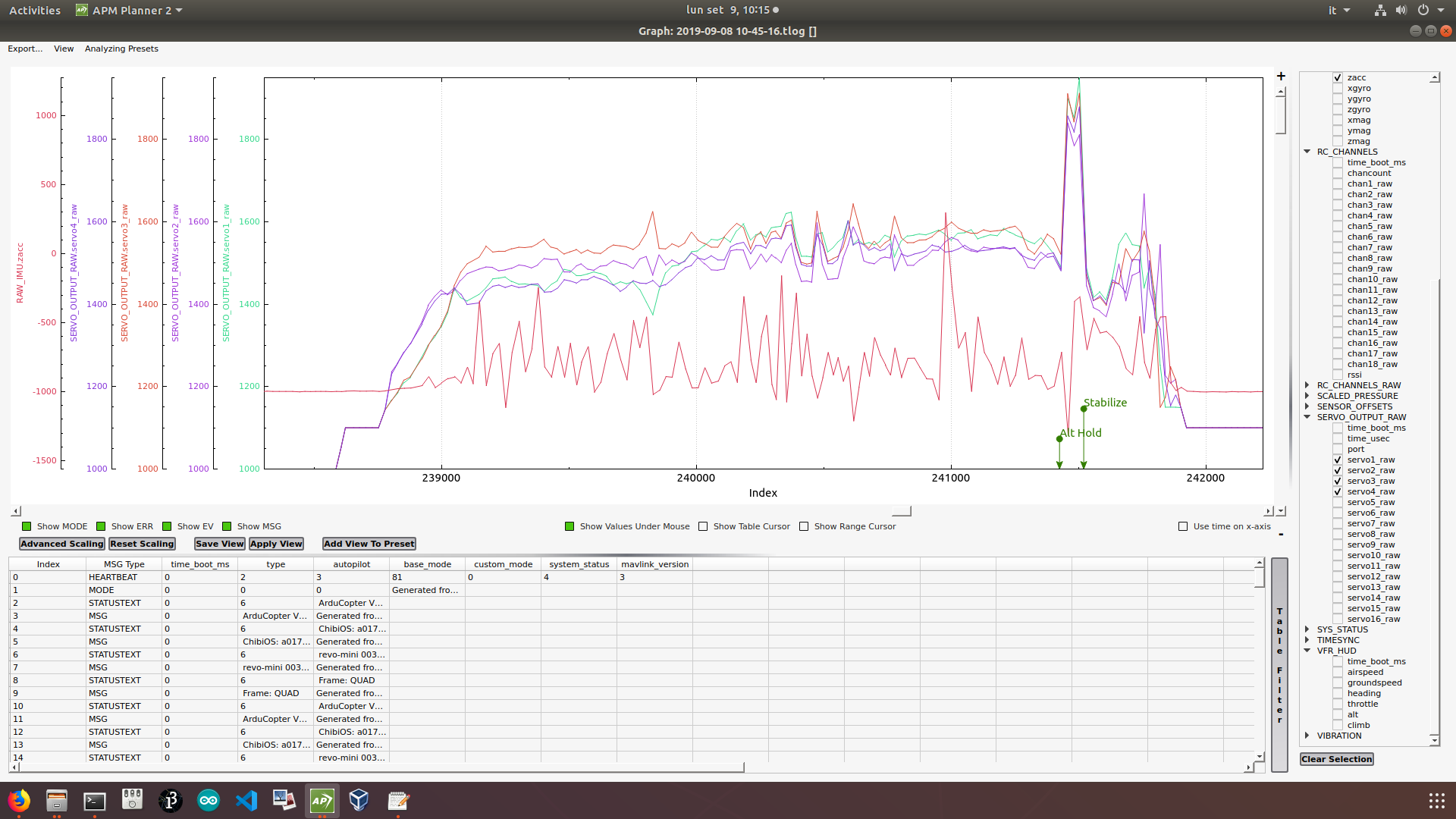
Unfortunately I only have a tlog and no dataflash log. I attach this tlog, from line 238500 to line 242500 (no time in this tlog) you can see a little indoor flight: takeoff in STABILIZE, a little bit of hover with motor around 1500 - 1600, then when I switch to ALTHOLD the motor goes immediately near 1900 till I switch back to STABILIZE.
I did several controls on the various parts of my copter, connections, firmware, parameters but I did not find any difference beetewen before and after the ESC change.
Lets start w/ the basics… Any chance something physically changed w/ your barometer? Or maybe the ESC is larger and funneling more air into the barometer? On one of my copters, I had to put foam around all four edges of the FC, between the ESC and FC.
Tanks @wicked1
The FC is an openpilot revolution within its case. The case enclose well the FC and there is foam over the barometer. All this is in the same place as before and with the same relative distance to frame, ESC, props.
EDIT
what I don’t understand is that in the past I had problems with stability in ALTHOLD, because of vibration or barometer with too little foam, but I never see the copter rocketing to roof.
I had the same w/ a 650mm copter… I had a motor kill switch programmed and I panicked and killed the motors… I tried to restart them when it was close to the ground, but it wasn’t soon enough and the frame was destroyed.
And like I mentioned earlier in this thread, the same happened w/ my very first microcopter and it destroyed itself slamming into my ceiling and then the floor.
So, common issue
It’s usually wind over the baro or vibrations. If you’re sure vibrations are OK, I’ve found increasing this filter helps: PSC_ACCZ_FILT
hi, i did not look at your logs, but, if the symptom you have is the uncontrollable rapid ascent in the pos hold mode - it is usually a side effect of extremely spiked vibrations that prevent normal operations. the threshold from normal to crazy is difficult to establish, but, if you get a situation when a single input from stationery results in the drone suddenly darting up into the sky - that is it.
solutions are to use motors that are less notchy, run 3 blade props and always mount FC on 5mm rubber posts. also check if any new wiring now connects or transmits extra vibrations. motor wires would be the primary suspect.
Okay. I will try to make some tests with this param when possible.
My problem was the PWM learning for hovering flight. It was too high for my setup, because that was the first flight and I setted to AltHold without waiting a bit for the learning process. Anyway, it’s good to know about this param too.
The problems was due to vibration, the last time i reassembled the copter i forgot to put the rubber pads between the FC and the frame. Now with rubber pads in place no problems also in ALTHOLD.
Thanks to @Paul_Atkin1 and to @wicked1.
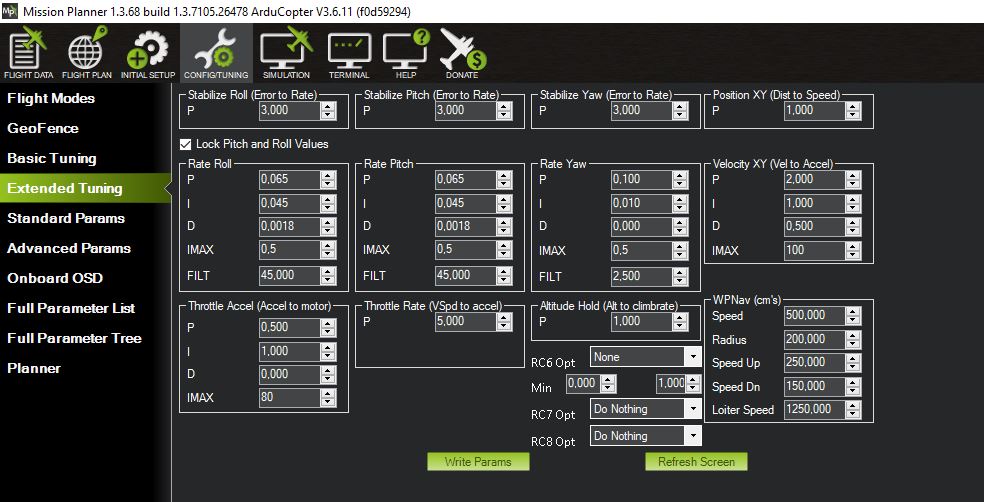
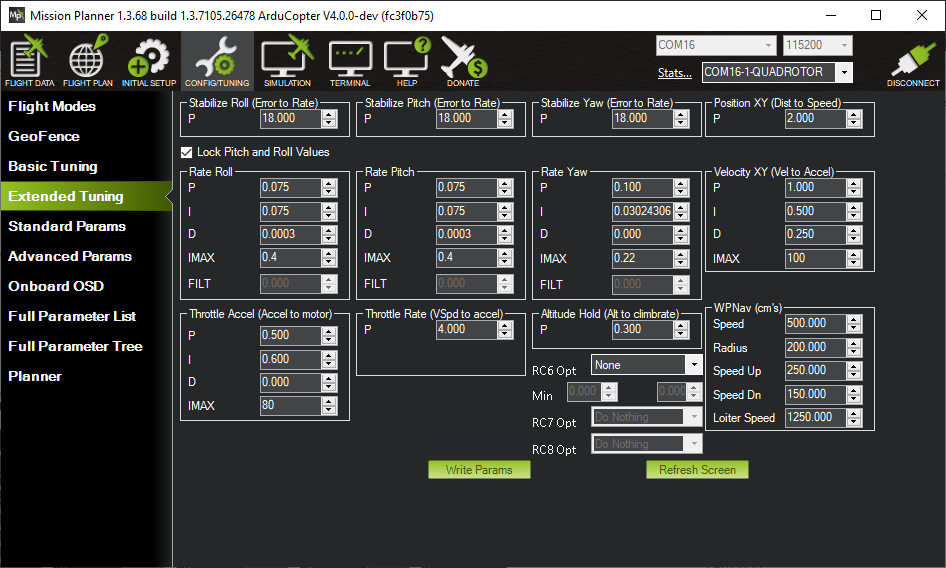
The Stabilize Roll 18 and stabilize Pitch 18 are made by you or by the autotune?
It still happened to me to have always similar so high values with autotune, but I remember Leonard told me about that as an autotune’s issue and I always bring down in the 8-12 range. Do you know if that specific part (the stabilize P) is now safe for small copter to use it as autotune suggest us?
In addittion I have honestly admit I don’t know exactly whats the difference in flying it at 18 or 10, leaving the rest the same.
Almost always its motor order or prop direction causing a flip. The way I have my Nano V6 mounted (USB connector up and to the right) requires Yaw 90 orientation and then some fiddling with motor order using Motor Test. First make sure the board Orientation is correct by looking at the HUD then use Motor Test to determine motor order. Pretty straight forward.