Just received my 3" Gecko frame - man that is a thing of beauty!
The problems was due to vibration, the last time i reassembled the copter i forgot to put the rubber pads between the FC and the frame. Now with rubber pads in place no problems also in ALTHOLD.
Thanks to @Paul_Atkin1 and to @wicked1.
Hi I have same fc on 2" 90 mm quad 2s lipo 1104 7500kv motors. Can you share your pids configuration? Thanks!!
I just nearly toasted the motors on a 3" quad by using the PIDs from a 4" quad - so be careful!
It’s a nightmare! I try also Inav but after only 30 seconds fly the motor is very hot! With betaflight is ok …
What I did was take my 4" PIDs and divide them all by 2 - that gave me something flyable and stable. I think the main culprit is the D term here.
@Alberto_Ds The hint from @andyp1per is a good one. Other then this the wiki page on tuning is a good starting point.
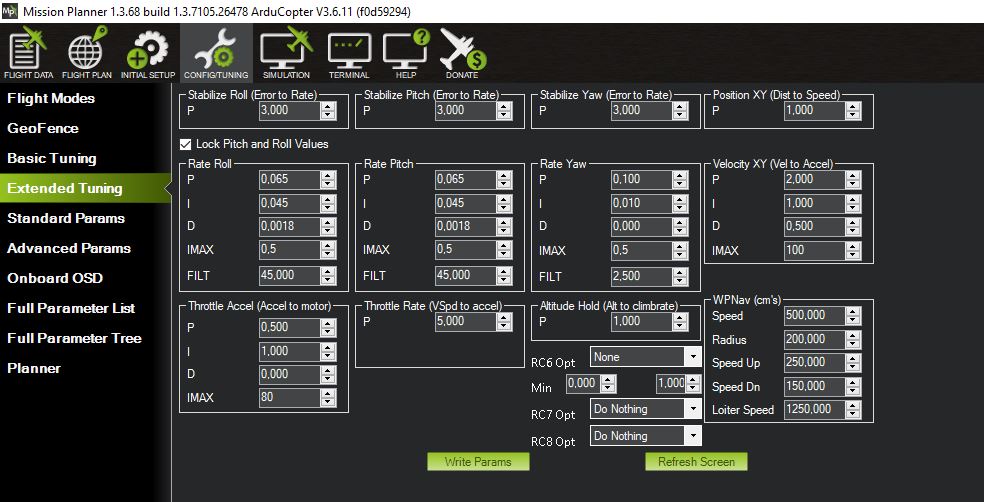
Hi all, thanks  this is my pids, but the quad no fly … flip only!
this is my pids, but the quad no fly … flip only! 

These are my current PIDs for a 3" that hovers.
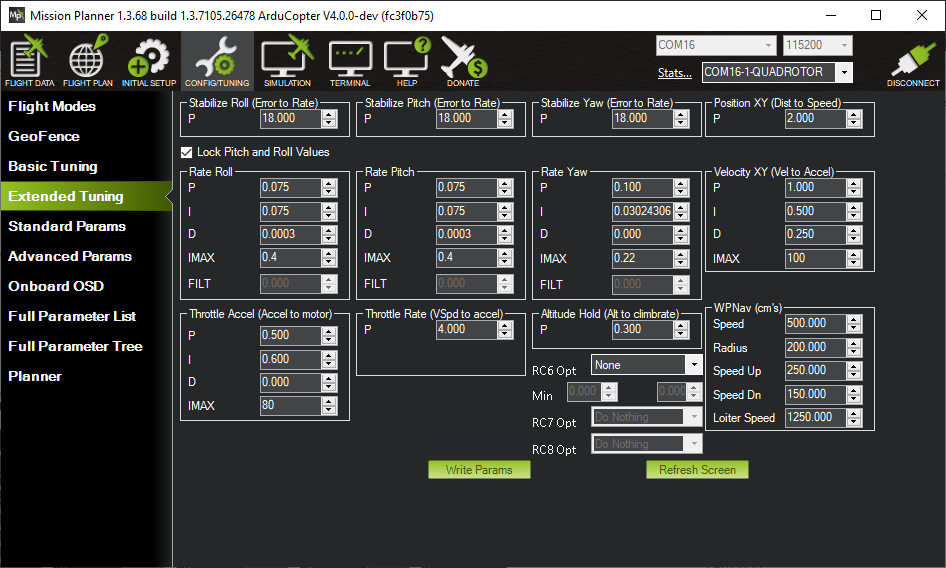
Note how much lower my D is.
Also set INS_GYRO_FILT and ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT to 80 and see if that helps. 45Hz is way too low for a microcopter
Flip sounds like something more fundamentally wrong - like motor order
The Stabilize Roll 18 and stabilize Pitch 18 are made by you or by the autotune?
It still happened to me to have always similar so high values with autotune, but I remember Leonard told me about that as an autotune’s issue and I always bring down in the 8-12 range. Do you know if that specific part (the stabilize P) is now safe for small copter to use it as autotune suggest us?
In addittion I have honestly admit I don’t know exactly whats the difference in flying it at 18 or 10, leaving the rest the same.
The values autotune give me seem to fly perfectly well
Almost always its motor order or prop direction causing a flip. The way I have my Nano V6 mounted (USB connector up and to the right) requires Yaw 90 orientation and then some fiddling with motor order using Motor Test. First make sure the board Orientation is correct by looking at the HUD then use Motor Test to determine motor order. Pretty straight forward.
Yes the motor order it was wrong, but now it’s ok in according with motor test, so A1 is front right, B4 rear right, D3 front left, C2 rear left. The HUD in mission planner moving is correct. I try with pid above in the thread and also set INS_GYRO_FILT and ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT to 80, the quad takeoff but is uncontrollable and fly in random direction 
Some times read in mission planner BAD AHRS
What mode are you flying in?
Can you post a log?
Did you do the HUD checks to make sure everything is the right way round (e.g. board orientation)?
in STABILIZE mode.
Sorry Hakrc mini F4 don’t have SD card slot.
The moving in HUD it’s ok like my F450 with pixhawk.
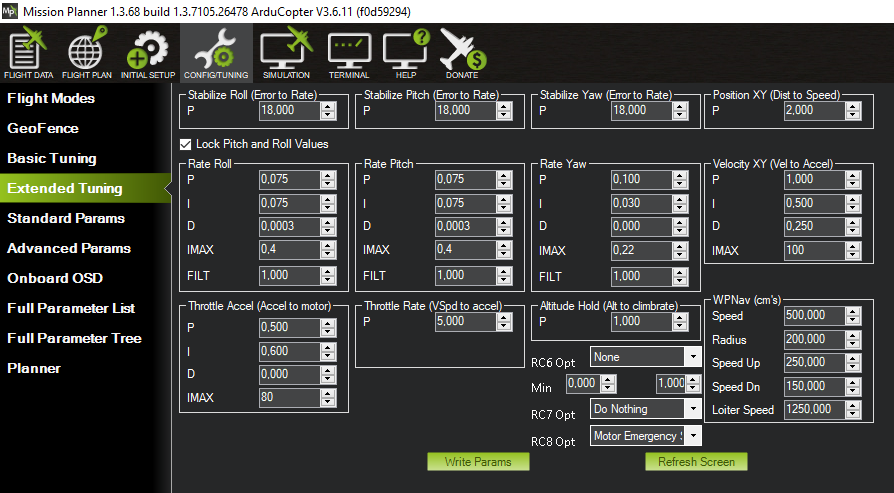
Now the quad takes off but shakes violently as if the pids were wrong
The FC is this and the arrow on FC is oriented like the nose of quad


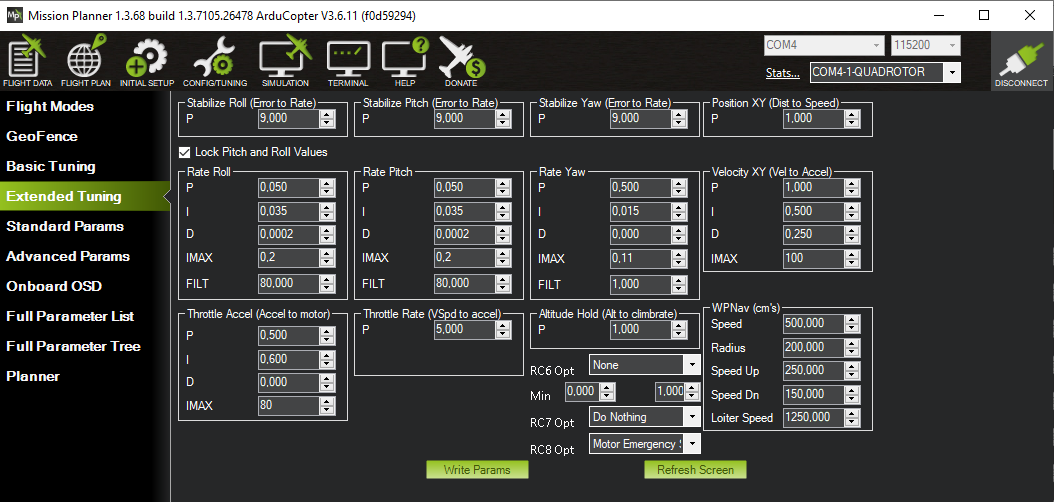
Divide your PIDs by 2 again and see if that gives you something more stable.
It says your D filt is 1 - that needs to be 80 for Roll and Pitch. 1 for Yaw is ok.
You can go lower by entering using the full parameter list - look for ATC_RAT_RLL_D etc.
Also try dropping Yaw P
did you flowed tuning instruction ?
if you did try autotune it will try to find best PID values for your drone
after these if you have shaking problem you should find its the angle loop or the rate loop causing the problems
by reducing these parameters if problem from angle loop
ATC_RAT_YAW_P
ATC_RAT_YAW_I
ATC_ANG_RLL_P
ATC_ANG_PIT_P
ATC_ACCEL_R_MAX
ATC_ACCEL_P_MAX
ATC_ACCEL_Y_MAX
by reducing these parameters if problem from rate loop
ATC_ANG_PIT_P
ATC_ANG_RLL_P
ATC_ANG_YAW_P
ATC_INPUT_TC
ATC_RAT_PIT_D
ATC_RAT_PIT_I
ATC_RAT_PIT_P
ATC_RAT_RLL_D
ATC_RAT_RLL_I
ATC_RAT_RLL_P
ATC_RAT_YAW_FILT
ATC_RAT_YAW_I
ATC_RAT_YAW_IMAX
ATC_RAT_YAW_P
but everything described well here
http://ardupilot.org/copter/docs/tuning-process-instructions.html