Thanks for the details! I will probably be building something similar later this year.
Do you have any of the 950mah 2s lipo packs? I wonder how long it would fly w/ one of those. LiIon’s can be difficult at times… If you don’t care about a long flight, it would be faster to charge a parallel bunch of lipos.
I don’t have any 2S Lipo packs yet, I’ll have to buy a couple and try them out. The closest I have is a 3S 850mah but it kind of defeats the purpose. It would be like the 3" I had on 4S. That was a dumb idea.
Hey I actually do have a 2S battery. It’s a 1300mah I use sometimes for the R9 module on my Tx. I have drained this pack way below advised voltage a few times but I’ll give it a try!!
OK, more data. I flew the 2S 1300mah pack and it’s very nimble at that weight (206g). I tried to fly as aggressive as I could in the house w/o pissing off my wife 14 minutes at 1054 mah. Current and voltage are now well calibrated. So with a 950mah pack flying to 800mah >10 minutes I would say.
Awesome, thanks! Now if only I can get my gimbal to weigh 50 grams, I’d be set…
Having said that, I just weighed it… 100 grams including the camera. I’m assuming you weighed your copter w/ a camera, so, subtract the runcam split, which isn’t much. Then I am also willing to give up my yaw axis, which is a relatively heavy motor. It’s close! But not quite under the legal limit.
@dkemxr I re-mounted the 4-in-1 + FC stack with shorter plastic screw and only one grommet, the Matek one, I have a stiffer stack but with less vibration, always less then 15 and no clipping.
Perhaps the longer plastic screws amplify vibrations instead of dampening them.
Now I would like to know if you tested your 5" in Althold and with what results.
Did you put foam on the baro? How much?
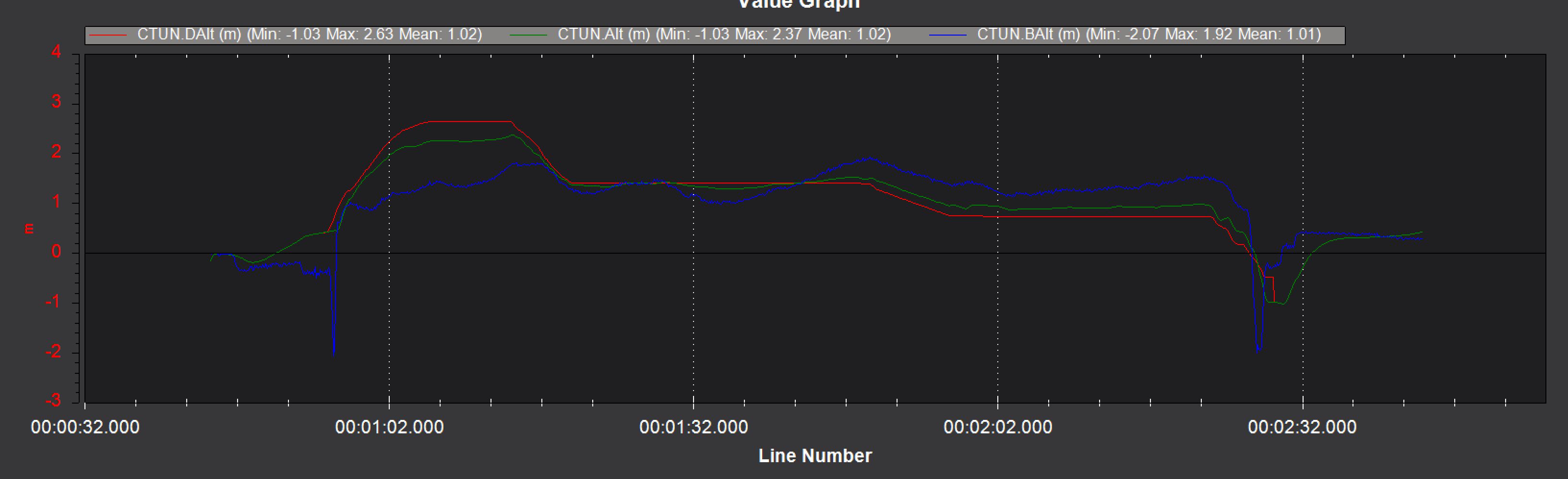
In my Althold test I see not so good behavior, I read good things about the DPS310 baro so I expected better behavior.
I also tried to do a Barometer Temperature Compensation, Maybe I have to try again.
Hi @anbello So far I have only been able to fly inside my house. It’s -5C and snow on the ground outside. But I did do some AltHold hovering to test. I think the results are OK. I did not do the Baro Temp Cal. I do worry a bit about the baro spike from ground effect (takeoff/landing). Perhaps the foam won’t work so well when it’s outside flying at speed. We’ll see.
I’m unclear what the process is for this based on the Wiki. As I followed it the TCAL_BARO_EXP was not updated with a value. I set TCAL_ENABLED to 2. Restarted the board and let it run for ~10min. Then what? Set it to 1 and power down? Leave it at 2 and power down and the set it to 1 after re-starting? I did the later and no fields were updated. What completes the process?
I ran the IMU temp comp routine and it completed fine with messages given as prompts. It automatically set the parameter from 2 to 1 upon completion. I’ll make some test flights today. I put it in the refrigerator before running and the min/max temps ended up at 11-45C.
Hi @dkemxr I would like to know if you have a log of your Matek H743 Mini (powered from battery and standing still) with LOG_DISARM = 1 to see the values of BARO and IMU temperature. I am asking this because on my board I see really high temperatures and I don’t know if is normal.
Hi @anbello I’ll create one. I was running these experiments and just looking at Raw Temp on the Tuning page live while it sat on the bench but didn’t make a log. This was after I tried the IMU temp comp. Anyway, I’ll get back to you with the data.
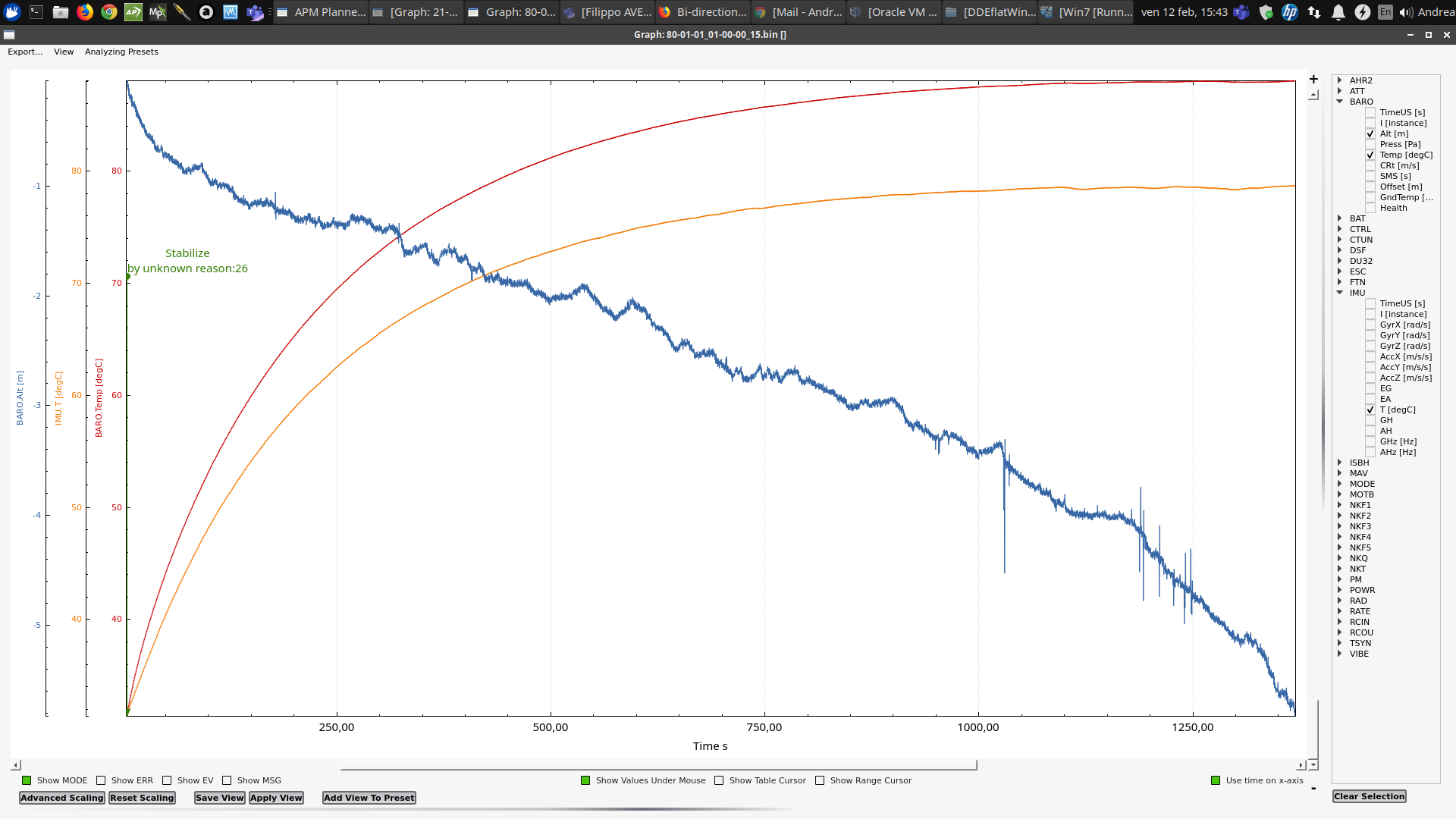
Here is the log. Looks like yours is getting significantly hotter. Perhaps about the same response from the Baro. I have not done a successful Baro temp comp.
Does your 4in1 have a heat sink on it? The Aikon one I have has a large one facing the Flight Controller. So large I worried about the weight on this quad.
Yes, you are probably right. The heat on the board when it’s powered from battery vs USB only would be from the BEC’s not the ESC. Speaking of that, I’m powering this quad on 2S, is that a factor we didn’t control for?
The MCU reaches a temperature of about 66 degrees and the 5V regulator about 60 degrees, when it is stationary on the ground and is powered by battery.
This brings the sensors to temperatures of around 60 degrees, because of the tiny size of the board the components are really close, the temperature then drop to around 30 degrees when in flight.
This large temperature difference causes bad readings from the sensors that must be corrected with temperature calibration procedures.
For the IMU the calibration procedure recently introduced by @tridge works well, but for the barometer the existing calibration procedure does not compensate well and I see anomalous behaviors in AltHold in the early stages after take-off until the temperature stabilizes around 30 degrees .
@anbello Very interesting. I have done the IMU temp comp but the Baro temp comp has not worked for me. Unfortunately I haven’t been able to do much flying outside. One flight this weekend which went well until it got stuck in a tree. No fault of the FC in this case and I got it back.