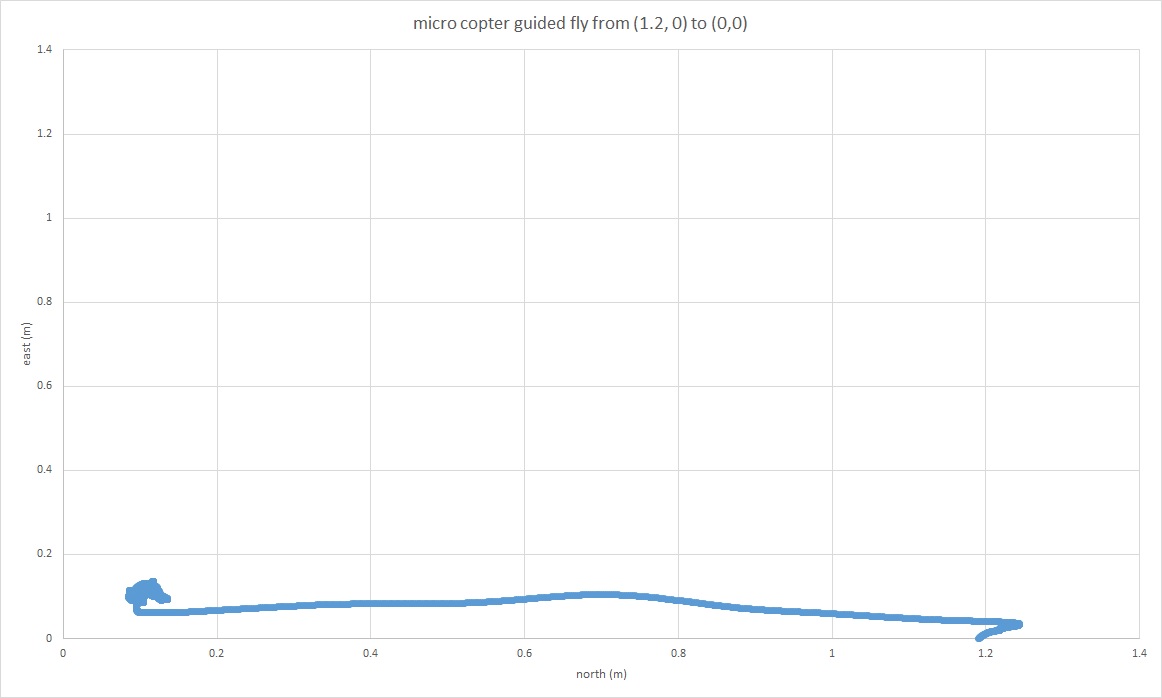
I build a micro copter for indoor navigation test. MicroArduCopter, 3" props, Omnibus Nano, Success! (thanks for parameter suggestion from @wicked1 ). It flies quite well in guided mode using external navigation. But I found when I give it a destination, it will fly to near the destination, but never “reach” the destination. For example, In picture below, I fly from (1.2, 0) to (0, 0). It just halted near (0.15, 0.15) and loiter there forever. I tested with skyviper v2450 in the same environment. skyviper will loiter around (0, 0). I would be very thankful if someone could give me a little hint. Thank you very much
Check your waypoint radius parameter- basically a parameter that puts a ring around the waypoint, and if inside that ring, the waypoint is considered “reached”.
Hi @james_pattison Thank you. Did you mean WPNAV_RADIUS?
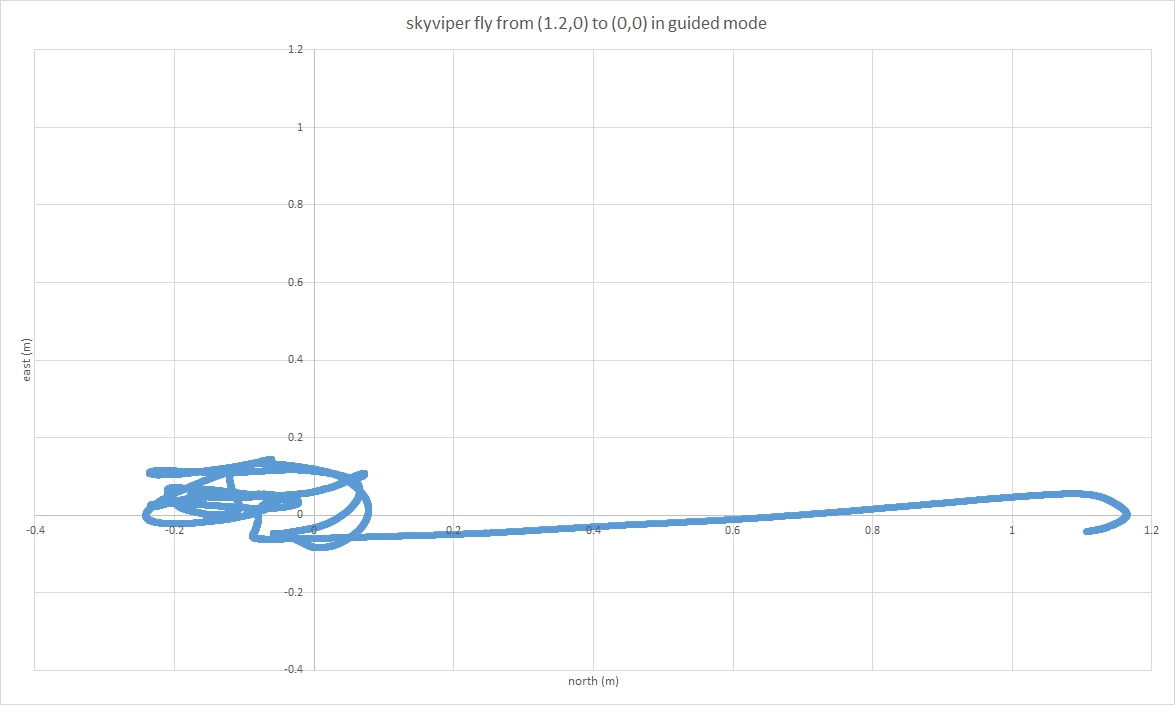
Below is the flight test of skyviper v2450 in the same environment. You can see it fly toward destination (0,0) and loiter around destination point. But my custom micro copter seems just loiter “near” destination.
1 Like
Yup. Were the two copters using a different speed? This can also effect how close the copter gets to a waypoint before stopping (faster causes it to stop sooner). But I’d make wpnav_radius smaller to force greater accuracy.