Hello, I am using Ardupilot SITL with Gazebo simulator.
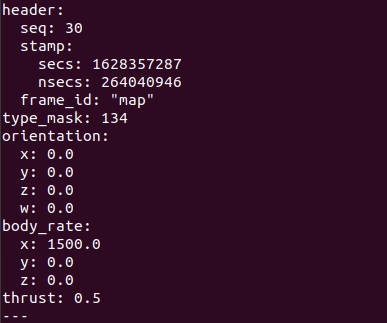
After switching to GUIDED mode, and taking off, I am publishing attitude setpoints, namely thrust and body rate values to quad. I am using the following topic : http://docs.ros.org/en/api/mavros_msgs/html/msg/AttitudeTarget.html
But the Quadcopter is simply not responding. I am not any facing error messages.
I am passing header message and correct typemask values.
The rostopic echo shows output as expected
I am sucessfully able to pass position setpoints using /mavros/setpoint_position/local, but apparently quad is not responding to /setpoint_raw/attitude messages.
It won’t work without merging the PR? I am trying to use type mask 128 to ignore the attitude, how was /mavros/setpoint_raw/attitude topic used prior to the PR you mentioned?
Typemask 128 will not work without the mentioned PR above.
The attitude must be specified as well as the thrust parameter.
You can decide to use or not use yaw rate but the other angular velocities must be ignored as they are currently non-functional.
Hi, thanks for all the help, using that PR, the drone is reacting to the type_mask 128. but when I am trying to use mavros_controllers along with ardupilot, the UAV moves in random motion and then crashes. @amilcarlucas
Do realize PR’s are usually at various stages of testing before merging. I’m not sure where that one is at currently. I’ve only added a few comments to it regarding parsing and haven’t tried using it myself.
Extra testers on new features are always appreciated
Perhaps, @Leonardthall might be interested in providing assistance?
Unfortunately, we don’t yet have support for the Attitude_Target messages to see exactly what you sent to the copter. But you can get an idea from the GUID log message and RATE.
@Leonardthall I’m not sure where you are at in terms of coding Attitude_Target?
Also looking at these logs with your PR I’m thinking it might be time attitude_targets got their own log message that reflect the new capabilities?
quaternion attitude + roll and/or pitch and/or yaw rate
thrust or climb rate (climb rate is not to spec and must be turned off using GUID_OPTIONS)
roll and/or pitch and/or yaw rate.
And the switch between the old vertical rate vs raw throttle control using the guided_options parameter is still present.
I want to move to rigorous support of these messages and this PR was intended to highlight that we need to agree on some changes moving forwards. We have done that now and just need to finish the job.
The problem with that PR is I have not done any work on the logging so I can’t see what you have sent into the controller. I can see that GUID_OPTIONS is set to 0 so thrust will be interpreted as normalised climb rate not thrust.
So before I am happy with this PR we will need to:
Update guided logging to make logging clearer and maybe separate logging for position vs angle commands.
Add and fix mavlink messages reporting the current state
Add messages to support angle + climb rate and maybe angle + angle rate limit + climb rate and/or throttle.
@Rihan_Aaron_Dsilva I am happy to give you a hand by updating my PR to get everything working for you if you like.