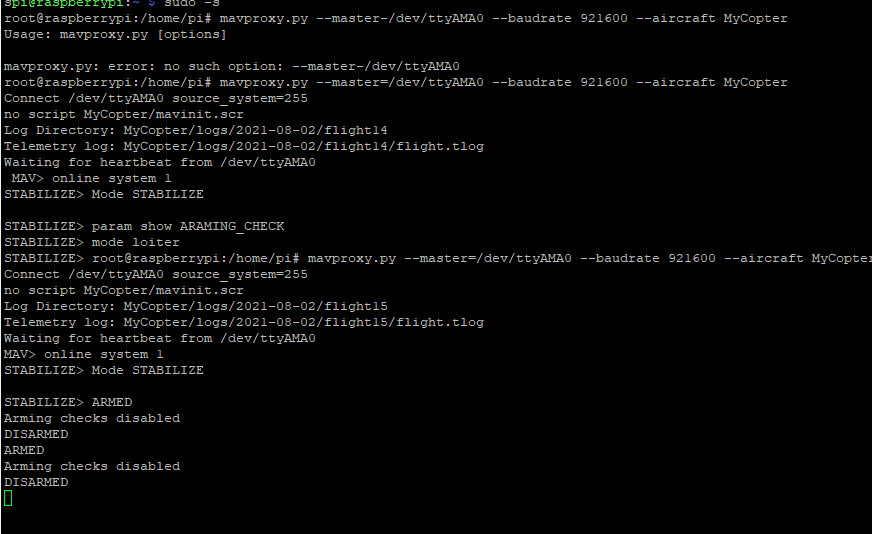
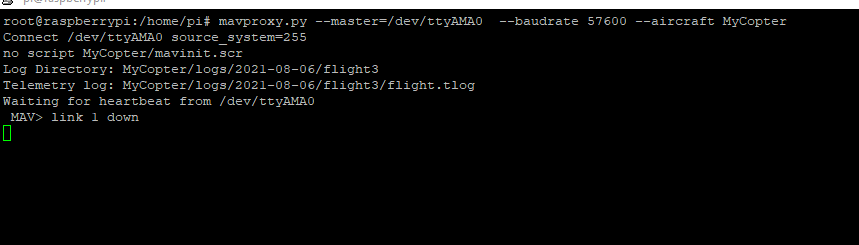
But the terminal gets stuck on “MAV>”. After this “Waiting for heartbeat from /dev/ttyAMA0” should come but it doesn’t.
I thought the connections to the telemetry port of the APM were the fault because I had to solder a few wires together so I started from the very beginning.
I tried:
Connecting APM and my laptop directly through USB
Connecting APM with Pi directly thorugh USB (Port /dev/ttyACM0)
Using a TTL USB to UART TTL to connect APM and laptop
Using the same converter to connect APM and Pi.
and all these worked as expected.
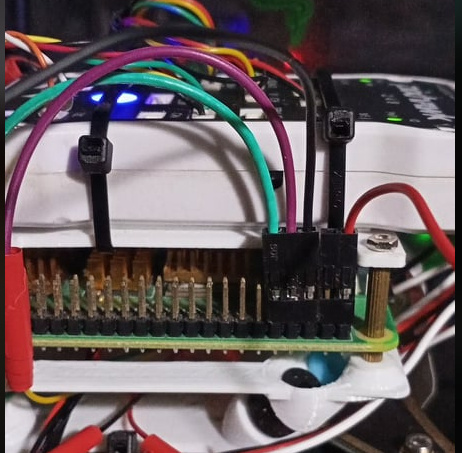
But when I connect the APM with the GPIO UART pins of the Raspberry Pi, it just gets stuck on “MAV>”. If it showed garbage values then it would be a baudrate issue but it just shows nothing and reversing the UART pins also gives the same result, where it should just say cannot connect or something.
Kindly help me figure out what the problem is. I would really appreciate it.
Thank you Stephen. Its works perfectly now. Thank you very much.
A bit off topic, can the APM 2.8 not be connected through 2 different ports at the same time?
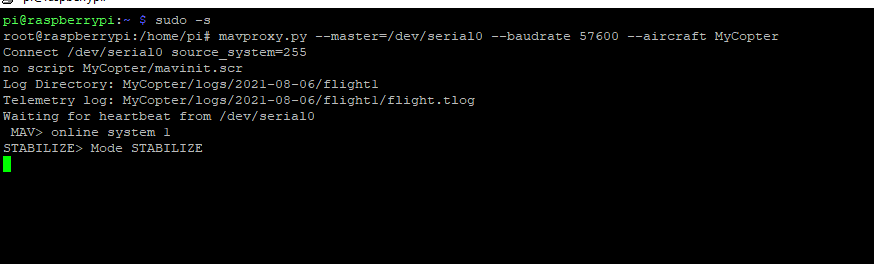
I worked on a Pixhawk 2.1 before and used the Telem connection with a Raspberry Pi 3 (AMA0) for running the mavproxy.py script to show the status of the vehicle on my ground station and simultaneously used a USB connection (ACM0) to run a script on Pi which gave commands to the Pixhawk.
When I try to do the same with the APM, the Telem connections breaks, saying “no link, link 1 down” and reconnects as soon as I remove the USB.
Can I not use 2 connections with my APM or is there some work around for this?
I think the APM2 boards can only use one connection at a time. I vaguely recall those ports being shared between a single TELEM, as part of the hardware design.
ive tried this command but it work but it only show less it should be the information about my drone right it only show the flight mode that im having it was set to stabalize mode and it wont change it only stuck with stabalize mode.
It appears that MAVProxy is getting telemetry from the autopilot, but is unable to send commands - this can be seen by the lack of “received parameters” message (MAVProxy needs to ask the autopilot to send the parameter set).
Check the Pi’s UART TX line (which should go to the TELEM RX on the autopilot) - it might be disconnected.
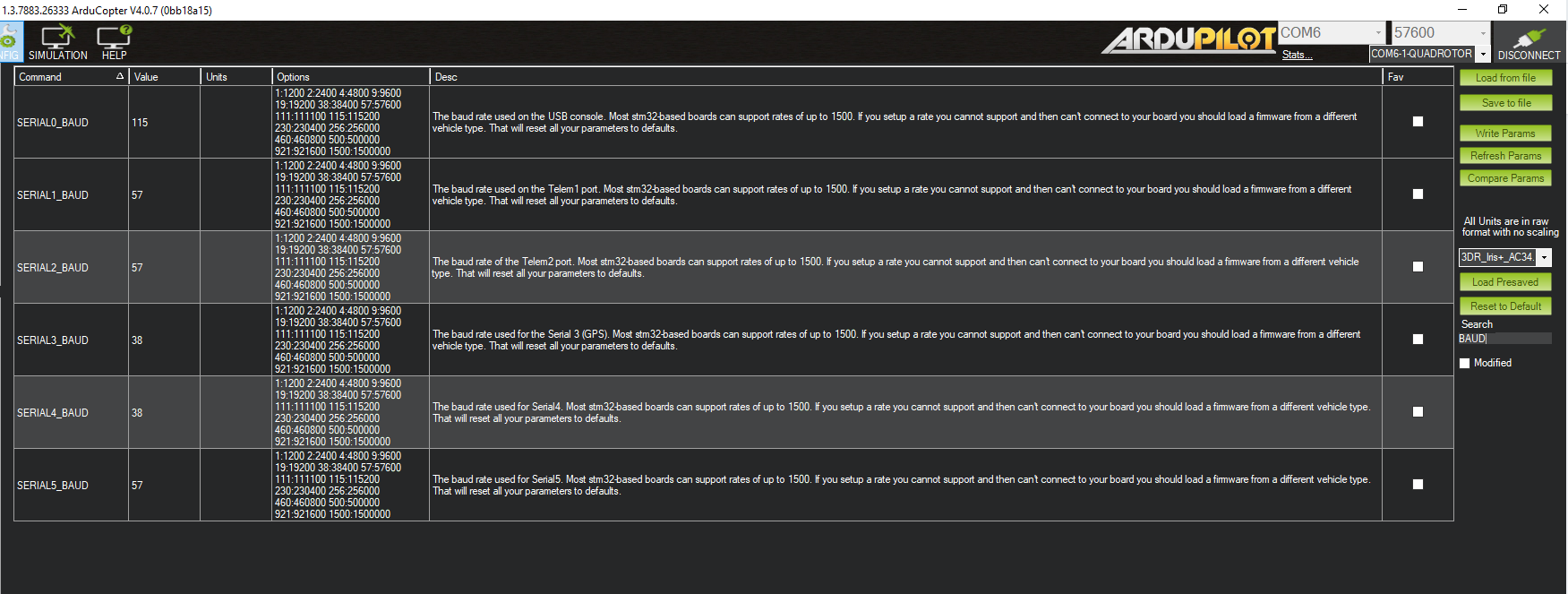
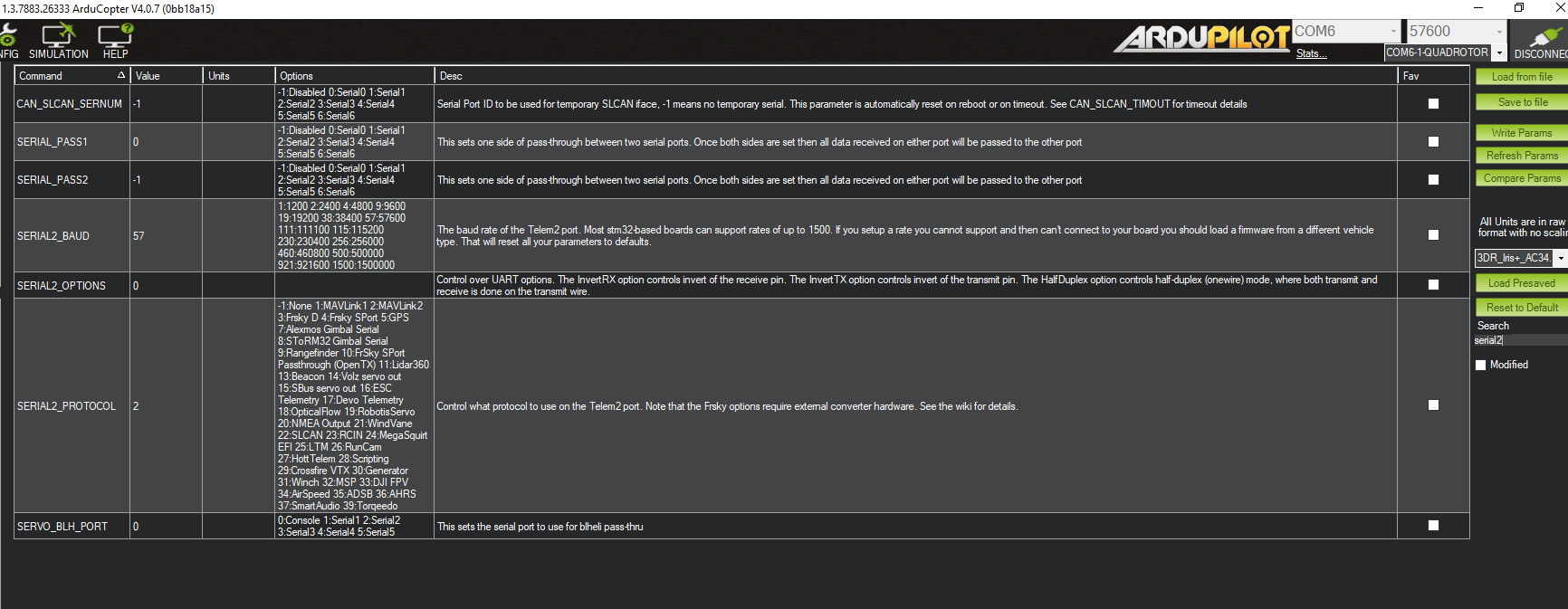
a guy from the Facebook community told me my problem was he said “the error says your port is out of range. Look at your port, it’s got an extra 0.” that what he said well where should I look into my ports I think he’s talking about the serial2_port I think but I already set mine to serial2 to bind the connection.