After last tuning(Align E1 900 Helicopter tuning Special thanks to @bnsgeyer), the Align E1 900 with heli-3.6.9 was well turned.
These days we build up another E1 900 with heli-4.0.7 firmware and try to tuning. We use the dynamic notch filter and obviously the noisy became less than the previous. But when we tuning the yaw axes by adjusting ATC_RAT_YAW_P and ATC_ANG_YAW_P, it just keep shaking and hard to control.
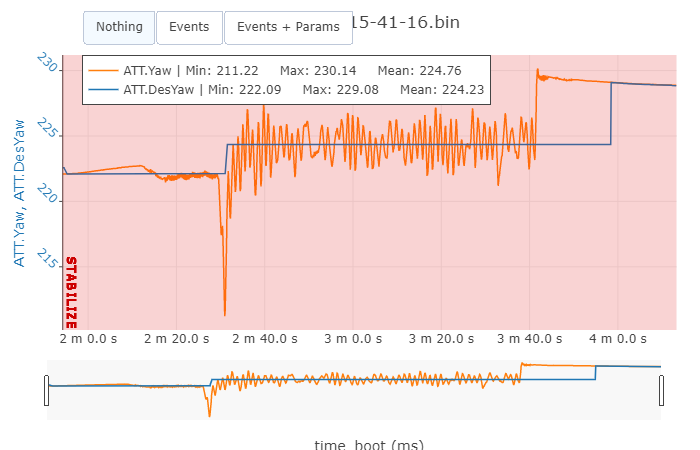
Here is the yaw ATT after initial flying.
I’m not sure whether we should change VFF or keep tuning yaw PID to fix the problem.
(I can bet my instructor’s head on the mechanical parts)
Any suggestion will help, thanks~
@zhenghan upgrade to 4.2.0 and use heli autotune feature. Read through the wiki and watch the videos. If you have questions, please ask. I will only help manual tuning in special circumstances. But I will definitely help with autotuning.
There is also H_COL_ANG_MAX and H_COL_ANG_MIN. These two you have to set. H_COL_LAND_MIN and H_COL_ZERO_THRST have defaults that are good for most setups.
@bnsgeyer Hi Bill,
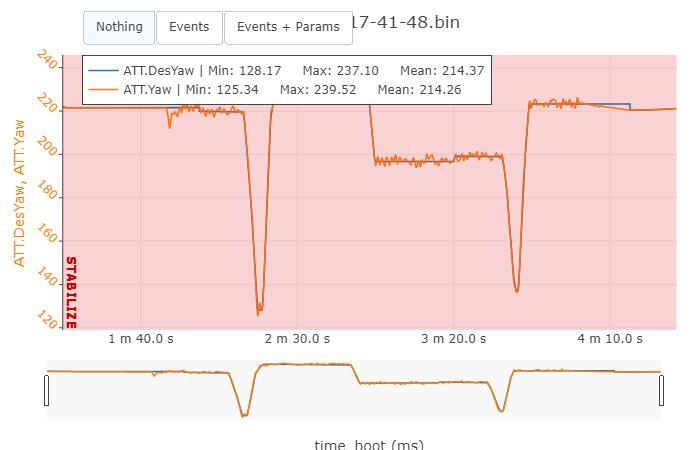
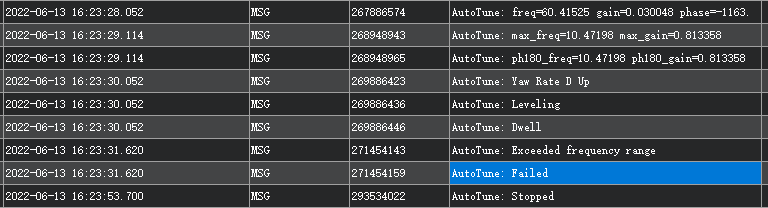
today we update the firmware to 4.2.0 and test the Autotune in yaw axes. But after a few times sweep, the GCS appears “Exceeded frequency range” like this.
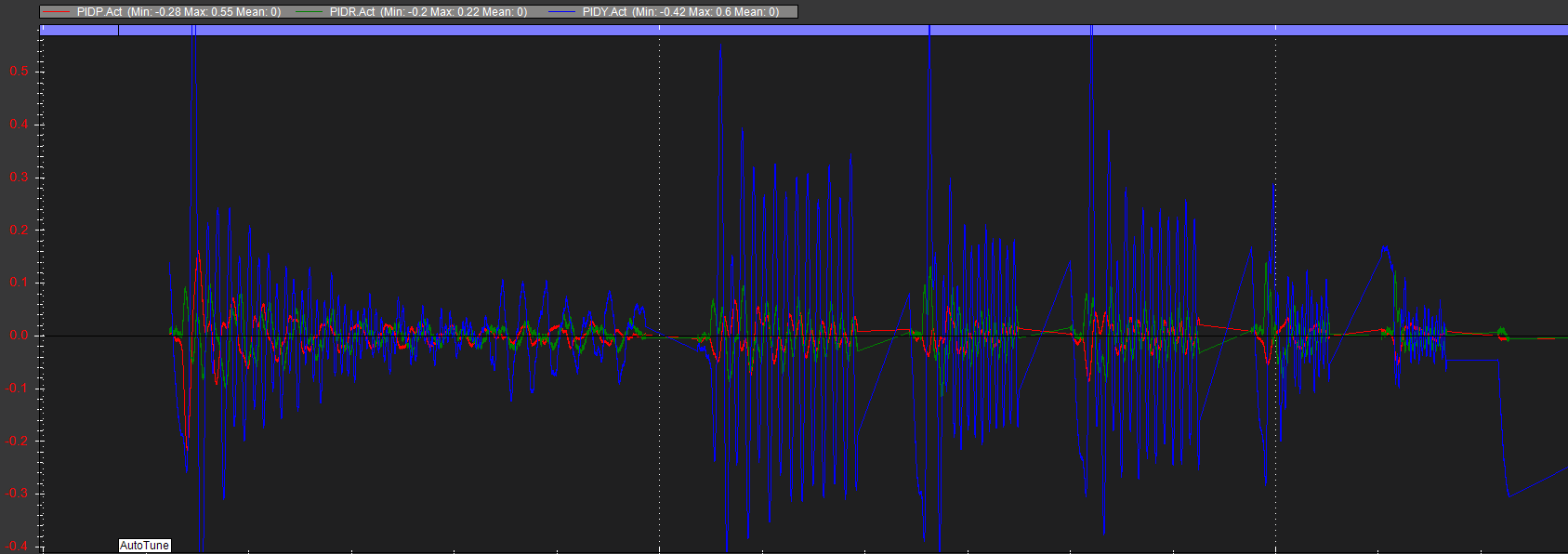
I have checked the PIDP/R/Y, the yaw noise is louder than the other two axes, but I think it is because the unstable yaw move cause the noise(During the autotune the noise once under 0.02). Is the noise cause autotune failed?
@zhenghan I took a quick look at your log file. I suspect the filter ATC_RAT_YAW_FLTE is causing the problem. I would recommend either removing this filter by setting the parameter to zero or set it at something high like 20. Was there a reason that you set this filter frequency so low?
Other things I notices looking at you parameters. You have the accelerations set very low. I realize this is a 900 size heli but I’m sure it can generate much higher accelerations in all axes (P/R/Y). For now I would recommend making the yaw axis max acceleration (ATC_ACCEL_Y_MAX) to 50000-60000 cd/s. Setting the accelerations for the pitch and roll axes could cause problems if you have the Rate P and D gains tuned too high. we can talk about that more later.
Next why do you only have 1 harmonic being notched for the harmonic notch filter? It allows you to set up to three. I would recommend using the other two. I’m assume the one you have set is the 1/rev. So if it is a two bladed rotor system then consider adding the 2nd and 4 harmonics to the notch filter. The bitmask would then be 11.
Last time you suggest the bitmask would be to add the 2nd and 4th harmonics, and set bitmask to 11, but we set it to 27. Because we analyse the log file and find a peak in 5th, it is caused by 1:5.3 ratio between main rotor and tail, which the 4th harmonics cannot cover it. Thanks to you suggestion, we set the INS_HNTC2_xx and set ATC_RAT_YAW_FLTE correctly.
Today we try to start autotune again and it seems well in roll/pitch FF tuning、pitch rateP&D tuning, the log file is below. Roll&Pitch FF tuning + Pitch rateD&P tuning
Things got strange when we try to tune roll axis. After we land in autotune mode, I notice that after roll P&D tuning the motorlock didn’t shuntdown automatically and rateP&D didn’t change, with only I change from 0.1 to 0.09xxxx. Its our fault that we didn’t check the log file to ensure the P & D is proper and mmediately take off after change autotune config to ANG_P tuning. The vehicle burst a large oscillation, we change the mode but the oscillation still live, fortunatelly in the end we landed it without crash. The log file is below. Roll rateP&D tuning(autotune shutdown fail) + Roll&Pitch ANG_P tuning(oscillation)
Is the uncorrect roll rateP&D cause the problem? I checked the wiki how to do with it, should I do the same check to pitch axis which save the gain normally?
@zhenghan I found a bug in the code in the autotune feature. It deals with multiple axes being tuned in the same flight. So you can still use the autotune feature if you wish but only tune one axis in a flight. reset the flight controller by cycling power before tuning another axis. I’m pretty sure this is what caused your problem.
@bnsgeyer Hi Bill,
We have used autotune for all axis. And these bin files are pitch and roll ANG_P autotune process. I hope to increase the parameter tuning data set of 900 class heli. Roll ANG_P autotune Pitch ANG_P autotune
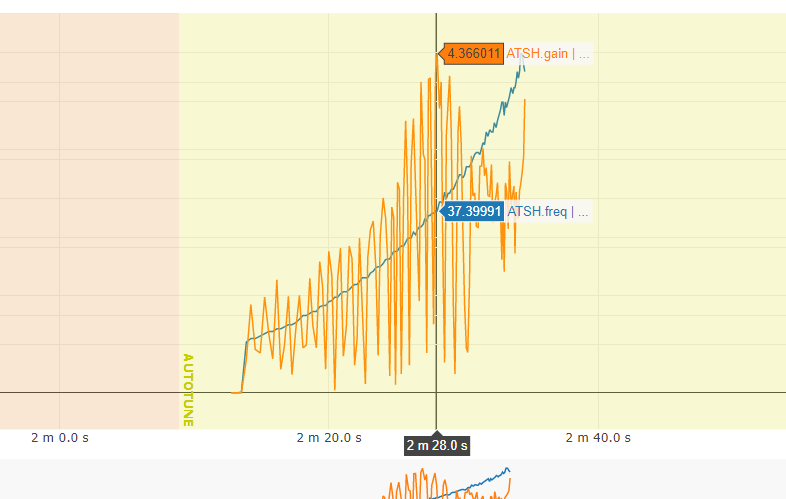
After in roll ANG_P autotune, I check the log file and I found the ATSH data is strange. The gain seems didn’t have peak like the wiki says(the pitch axis is normal).
3rd loiter fly log file
And as a result, at 3rd flight we try the loiter mode and the roll began to shake, switch to the altihold/stablize mode can stop the oscillation. We found that the attitude plot is not good after autotune, is the PID not good enough cause the oscillation?
@zhenghan I think you need to start over with your pitch and roll tuning. You need to change your settings according to the wiki before doing your first flight. Make all of your setting changes according to this table in the wiki for pitch and roll. I mean set them ALL exactly as they appear in the table. The only one I might suggest to be different is ATC_INPUT_TC. I would recommend that you set that to 0.22 to 0.25. I would probably go with closer to 0.25 for a 900 class. Once the parameters are set then tune pitch FF, then roll FF. Then you can tune Pitch Rate P and D then Roll Rate P and D. Just perform them as separate flights with the current firmware since there is a bug. So be sure to cycle power between each of these. Post the results so I can have a look.
Thanks,
Bill
@zhenghan having the max accel that low causes problems with the tuning. The autotune is performing maneuvers at a reasonable rate. The angles changes that require high acceleration are small (<5deg). The FF has angle changes of 15 deg but the accel requests are small because it is only requesting 50 deg/s steady state. Are there any instructions from the helicopter manufacturer that would restrict you from performing aerobatics with this heli.
I think you only set this parameter as low as you did was due to our wiki that recommends between 35000 and 50000 for 900 size heli’s. This is more for making the aircraft feel smoother. Not for structural concerns. If you are concerned your camera mount will not handle the tuning then remove it and tune without it. The tune won’t be as good but it will be close.
The feel of the aircraft should be done by using the ATC_INPUT_TC parameter not the accel max. That is why I recommend setting the ATC_INPUT_TC to a higher value like 0.25. Please follow my instructions.
i was a few days on holiday in Vienna Austria. So I am late to answer your response.
Please keep me further informed about your autotune of the 900 heli. I would be interested about your parameter sets and your results of the autotune behavior of the heli during the autotune. Was it save or tricky?