Sorry for didn’t reply to you, because I took a summer holiday in the past month. Yesterday we continued the tuning, it still has some problems but it’s safe enough(but it is still kind of terrible when you see 900 class helicopter shaking in the sky).
Thanks for your feedback. I hope you had a relaxing vacation.
Do you have any insights into which autotune parameters to choose or not to choose?
I would like to avoid critical situations.
I have done the last few days on a 700 logo with
additional weight (total 7.5 kg) performed the autotuning for the rear (Yaw).
Of course, it has fidgeted like a fish on the line, but actually went quite smoothly.
If you will tune the swashplate, it certainly looks more dangerous? At least if you are not a 3d pilot, but only flies scale.
I follow your suggestion and change all my settings according to the table(include the ATC_ACCEL_MAX to 110000), and I change the ATC_INPUT_TC to 0.24. We comfirmed that the params are set correctly after every autotune. There still have the same problem, when we switch to loiter from altihold, the heli seems well, but it will shake when we input a sharp move in roll axis. We try to change ATC_ANG_P of roll axis to avoid ocscillation(increase and decrease from 4.5), but it didn’t work. It is the bin file Loiter fly. And it is the param in this flght params.
I think it might be the uncorrect rate P & D setting cause the problem, but it seems that autotune cannot fix it. Do you have any suggestion for this?
@heri
Hi Heri,
You can take the param in the post I just made.
I’m also didn’t familiar with autotune but I think it will be convinient if it works well, so I’m willing to try it. About whether the param that the autotune set for you is correct, you can see the wiki. When you land the vehicle after autotuning the rate P & D, you should make sure the rate D is not a very small value like 0.000000000123(I have met it). If it is, you shoule download the log and find the message after autotune sweeping. Which tell you the “max rate_d = xxxx”, then according to the wiki to set the correct value.
@heri just a quick note. I had the opportunity to help a company tune there 38 lb 800 size heli with autotune. The autotune maneuvers were safe and didn’t harm the helicopter. I am learning that there is a little more to setting the parameter for max frequency. It can affect whether the code can find the max allowed gains. So I may need to provide a little more coaching in the wiki
as I have written several times, I approach the subject of autotune very cautiously for me.
I have therefore taken my “cheapest” 700 helicopter and tuned the tail.
Here I was sure that I could quickly recapture a “crazy” helicopter by oversteering.
This worked well and has now made me more courageous to go to the swashplate. Whereby I still have to do the analysis of the autotuning according to your wiki to be able to judge the result.
If I understand you correctly, you want to add your findings with the big heli to your wiki? Do I understand that correctly? If so, then I would wait for that. Please give me feedback when you have changed the wiki for this.
Bill, at this point, always thanks for your great work!
@zhenghan I have looked at your parameters and your log. I suspect that the parameter PSC_VELXY_D is set too high. Please make this parameter zero and try again. The new loiter may behave better and not need the PSC_VELXY_D to be tuned. See how the heli holds position with this parameter set to zero.
@bnsgeyer
Hi Bill,
We try to tune down the PSC_VELXY_D from 0.5 to 0.3, the effect is obvious and there is no obvious oscillation happened. As a result, it seems it will seem kind of loose when hold position. It is especially obvious before landing. It is the curve and bin file.
@bnsgeyer
Hi Bill,
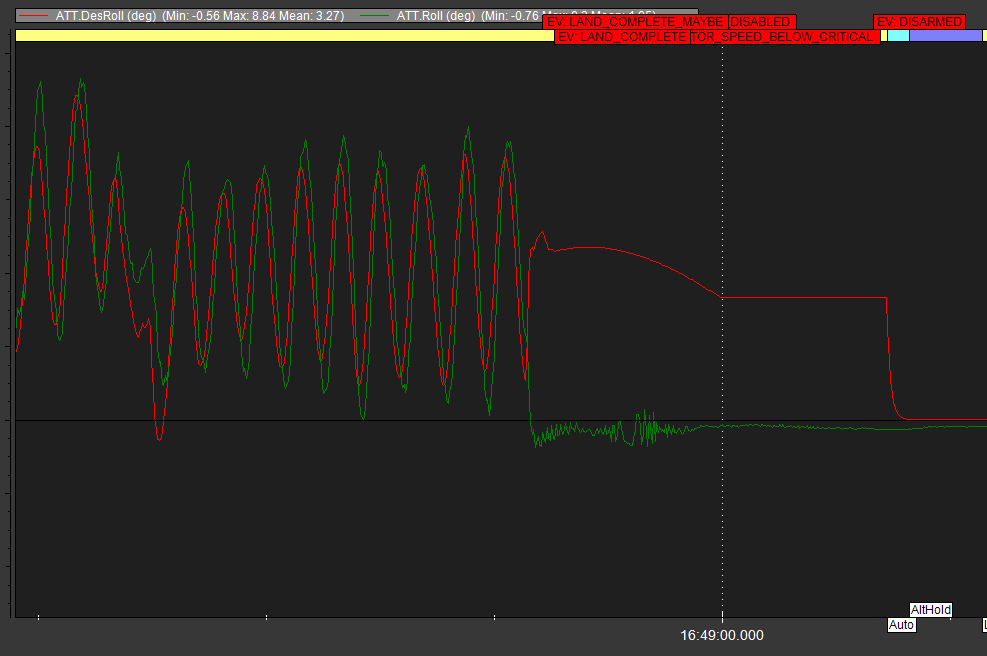
Today we try to mount our camera gimble to the heli and began fly test. The performance seems it didn’t react quickly but can just hold the position. I think it is the PSC_VELXY_D param effect it. We try to add the param to 0.5 again, but it started shaking. The bin file is below. gimbletest log file
From the ATT data, the roll axis sometimes keep opposite from des. We try to adjust PID param again to stop it.(It seems dangerous to let the vehicle start auto fly test).
Is there a criterion for judging whether an aircraft has a good PID? We are glad you have some suggestions for the situation.
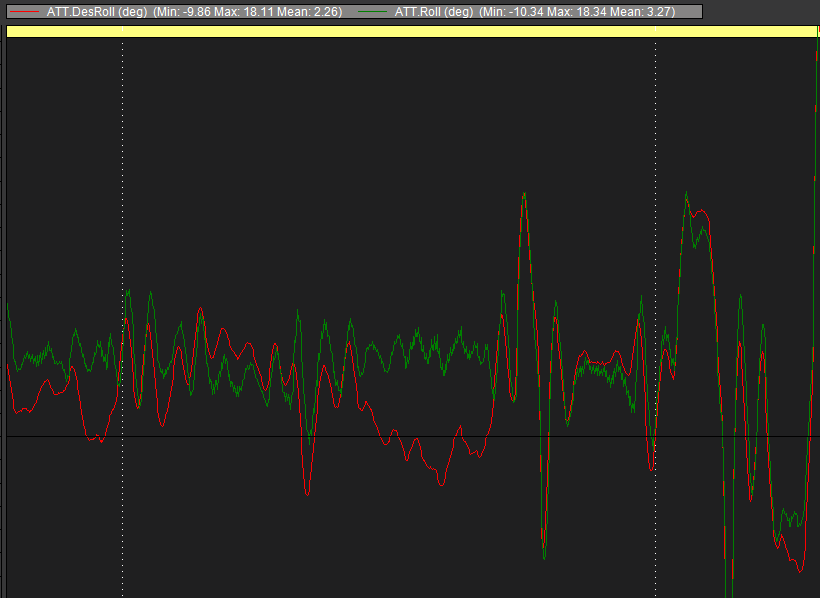
When the desired attitude and the actual attitude separate as you show in the plot, that is most likely due to not allowing enough Integrator to build. I know you have ILMI for pitch and roll at 0.05 but I think you should make it higher. I recommend you make it 0.1. That will help keep the desired and actual values together.
But even though, the desired and actual roll are not tracking exactly together, the position controller velocities look really good (PSCE.TVE and PSCE.VE as well as PSCN.TVN and PSCN.VN). Now it does look like there is some low frequency oscillations as you showed in your previous post. The only thing I can say here is that if you aren’t seeing the low frequency oscillations in pitch and roll in stabilize flight mode then the issue be with the position controller PID gains. You might try lowering the POSXY.P and VELXY.P gains to see if that stops that oscillation.