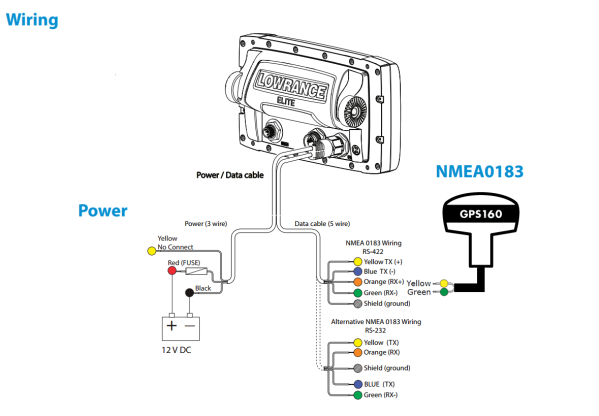
I am trying to connect a Lowrance Elite TI2 to my boat project to gather bathometric information. I currently just log all the sonar data to a SD card and then use ReefMaster to create maps. I wanted to be able to get real time depth using NMEA 0183. I have the Lowrance NMEA 0183 connector and can get data on my computer through HyperTerminal (using a serial connector Rx and Gnd going to the Tx and Gnd on the Lowrance cable). With the boat sitting in a filled water trough, the data looks like: $SDDBT,1.5,f,0.4,M,0.2,F*04
The 1.5 is the depth of the water…not sure what the other numbers are. The Lowrance says that the Protocol is RS 422 (no option to change). The Lowrance allows me to change the string – but only to add or subtract information being sent.
I am connecting through Telem2 using the Pin 3 (Rx) and Pin 6 (Gnd) because this worked on the computer. I have also made all the changes to the parameters as described in previous posts:
[SERIAL2_PROTOCOL] = 9 (Rangefinder)
[SERIAL2_BAUD] = 9 (9600 baud)
[RNGFND1_TYPE] = 17 (NMEA)
[RNGFND1_MIN_CM] = 13
[RNGFND1_MAX_CM] = 30000 (i.e. 300m).
[RNGFND1_ORIENT] = 25 (i.e. down) if mounted on a boat
But I continue to get nothing on sonarrange in Status in Mission Planner. Does anyone have any ideas ? Do I need something between the Lowrance output and the Cube Orange? I see that this was tried before by others – but I am not sure of the success they had. I am currently running ArduRover V4.2.0. and Cube Orange. Any help is appreciated.
I think that RS422 cannot be directly connected to an autopilot’s TTL/Serial port but instead some kind of converter is required. I’ve had a quick google for it but it keeps pulling me towards RS485<->Serial converters … maybe these will work because RS422 and RS485 are quite similar… but I’m not sure.
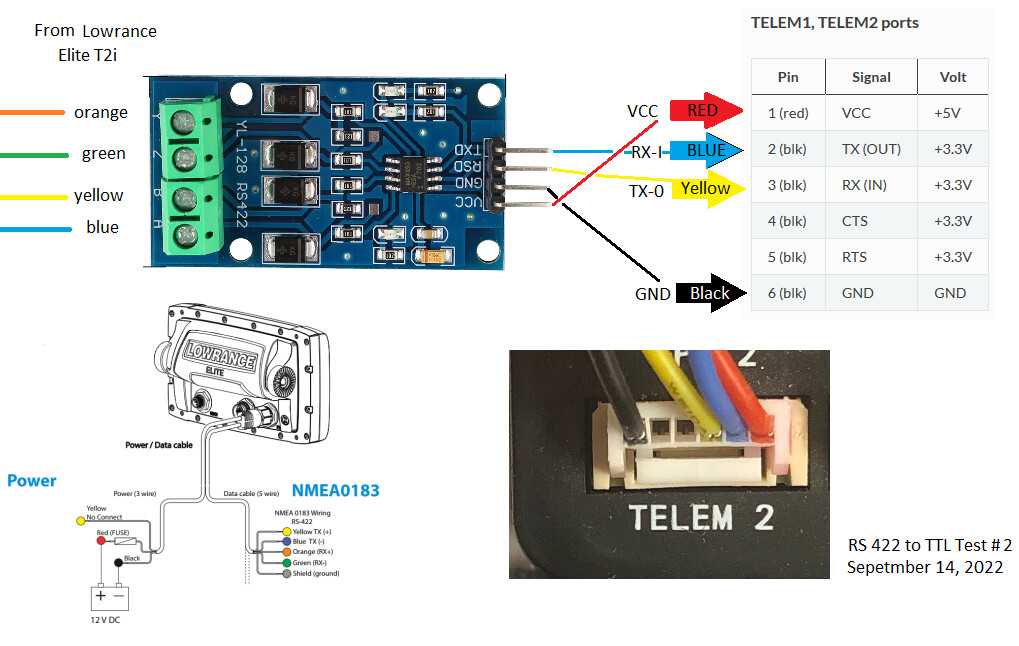
Thanks for the information. I have ordered a RS422 to TTL interface and will get back with results.
This is what I have found so far about the Cube Orange Serial Ports:
The Telem2 port on the Cube Orange is a “UART (serial port) with HW flow control” UARTs transmit one bit at a time at a specified data rate (i.e. 9600bps, 115200bps, etc.). This method of serial communication is sometimes referred to as TTL serial (transistor-transistor logic).
When the interface comes in I will let you know how it is working. Here is the Test Tank - the boat is anchored to the log to keep it from drifting.
I’ll add this to the wiki when/if you get it working 'cuz the Lowrance is a popular brand. Just tell me the model etc and if possible the details on how the pins are connected (or you can do it yourself but it’s tricky the first time you do it so I’m happy to handle it).
hello RDodds, did you happen to get any results? I’m also using a lowrance sonar and would like to see the depth readings in missionplanner.
at the same time i’m trying to feed the ardupilot gps data as a NMEA stream into the lowrance.
at the moment i think i’m stuck at the bit with the rs422/rs232 convertion.
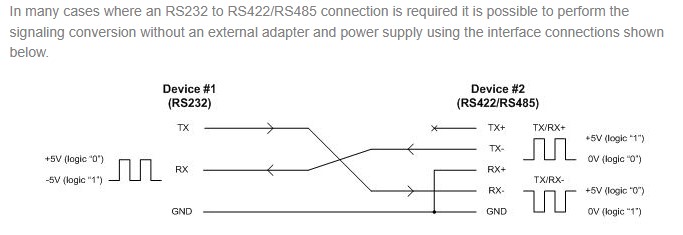
i found out though, that this convertion shouldn’t be too big of a problem. simply because of these two pictures i found.
here you can see that the lowrance sonars seem to accept rs-232 by simply connecting differently.
and here is shown how that works.
i would love to hear wether you made any progress.
Just to tie topics together we’ve got another discussion going on here re how to connect an AP autopilot with a Lowrance sonar. Bathymatric mapping --urgent help--
Just to tie topics together we’ve got another discussion going on here re how to connect an AP autopilot with a Lowrance sonar. Bathymatric mapping --urgent help--
Thanks - It looks looks like this problem may be solved. If it is, I will put a link to the complete answer - or post it here to so the thread can be completed.
Use the settings discussed here earlier this year:
[SERIAL2_PROTOCOL] = 9 (Rangefinder)
[SERIAL2_BAUD] = 38 (38400 baud) (or whatever you set the Serial Output on the Elite to)
[RNGFND1_TYPE] = 17 (NMEA)
[RNGFND1_MIN_CM] = 13
[RNGFND1_MAX_CM] = 30000 (i.e. 300m).
[RNGFND1_ORIENT] = 25 (i.e. down) if mounted on a boat
You will have to set up the Serial Output on the Elite to set the serial sentence to just output Depth and make sure the baud rate is the same as your Mission Planner
Hi @RDodds,
so summarized it is possible to get depth from lowrance to AP but not GPS to Lowrance, is that right? Because I want to build a boat using more accurate GPS (I am thinking about RTK or even buying the correction data from the government costing 2€ per day for decimeter accuracy) but I also want sidescan with accurate gps coordinates, that I can e.g. check with sidescan when I have irregularities in my data.
As i understand my only option is using depth from Lowrance and combine it with accurate gps in AP for Reefmaster (using the .log file), as I can’t input accurate gps to the lowrance and use the lowrance protocol in Reefmaster.
In theory it should be possible to send GPS data (with nmea) to lowrance.
But I couldn’t get it to work until now. And I didn’t find out yet what the cause is.
Probable causes:
my elite ti is too old to accept nmea input
wrong connection
wrong protocol (rs 232 Vs. Rs 422)
lost in translation between the two rs protocols.
I also don’t know if the autopilot outputs rtk corrected data if you set a serial port to GPS/nmea output.
If not you’d need to send the rtk data from your ground control to the boat.
As I said: should be possible. But noone managed to (as far as I know)
Hi, if the autopilot is using an RTK GPS and its position is sent to the Lowrance (by setting the SERIAL_PROTOCOL = 20/NMEAOutput) then it the Lowrance will receive an RTK corrected position. In fact, the position output from the autopilot is not just the GPS position. It is the position from AP’s EKF which is better than the GPS because it is a combination of GPS+Accelerometers.
By the way, AP 4.3.0 has an important fix for the NMEA output which should greatly its accuracy. The lat,lon numbers were being truncated meaning they were off by up to about 1 meter.
Didn’t know that Ryan. Thanks for the clarification. That’s not what I would have thought and speaks a lot for how good the arudpilot software is. This makes it even more interesting to feed the lowrance with the arudrover GPS data.
Out of the possible causes I identified, I somehow think that it probably is that my elite ti is too old.
I’m hoping for someone with a newer lowrance model to try this. Or maybe I find a good enough reason to buy a new lowrance sonar.
That all being said, using sonar with rtk throws up some other problems. Surely your readings will get more exact. But you’re combining two systems. One with centimeter or decimeter accuracy with a sonar with meter accuracy.
Depending on the frequency and sonar you’ll always measure a cone of multiple meters wide. So you’ll never get an underwater map with centimeter accuracy. Unfortunately. But rtk would greatly help to produce sidescan mosaic, which is what I’m after. To produce a good mosaic, the boat is supposed to drive really straight lines. And as far as I can tell it actually does, even without rtk. But the sonar has its own (worse) GPS and thinks the lines are not as straight.
Simply feeding GPS into lowrance would get rid of this problem. I’m on it, but don’t have that much time on my hands as I would need to fix the problem.
Maybe next year. I’m not letting lose!
I’ve never looked at the WASSP sonars before but from looking at their website it seems they probably have an ethernet connection. AP doesn’t yet support Ethernet but it is coming within the next year I’m sure. After that I think we would need to write a driver to allow AP to send position data and receive distance data from the sensor so it can be logged and sent to the ground station.
If the sensor already has a serial interface then it’s possible we could write a driver now without waiting for Ethernet support but I can’t figure out from the web page whether such an interface exists.
In general I’m happy to write a driver if I can get my hands on the hardware somehow.
Hi @Holly918,
since. I am working on a school project right now, it depends if our sponsor gives us enough money to buy the lowrance elite ti2 or if we have to use only a normal sonar (no sidescan). I agree on your point with the cone, but I think using chirp it can be quite accurate nevertheless.
So there are two options:
If mapping a lake as a depth map, I think it’s better to send the depth to the AP and combine it there with the EKF data. You need a RS422 to TTL converter to get the data from the sonar to the AP.
You should be able to get the GPS data via NMEA out to the sonar (but then you have no depth data on the AP). There is a configuration menu in the lowrance software, where you can choose the gps source (there are external gps options from Lowrance itself but using EKF is cheaper, search on YouTube for setup guides).
I don’t know if it’s possible to do both at the same time since getting depth is using serial settings in rangefinder and the other one uses the NMEA out setting.
Thanks for the comments. Theoretically it should be possible for the autopilot to send position information to the sonar via NMEA and also receive the depth information back from the sonar (also via NMEA) all using the same serial port. If it’s not possible then it is a restriction within the sonar I think.