Hi @rmackay9 ,
so the setting SERIAL_PROTOCOL = 20 (NMEAOutput) should be able to send GPS and get depth data at the same time, but [SERIAL2_PROTOCOL] = 9 (Rangefinder) and [RNGFND1_TYPE] = 17 (NMEA) is Input only?
Did I understand that right?
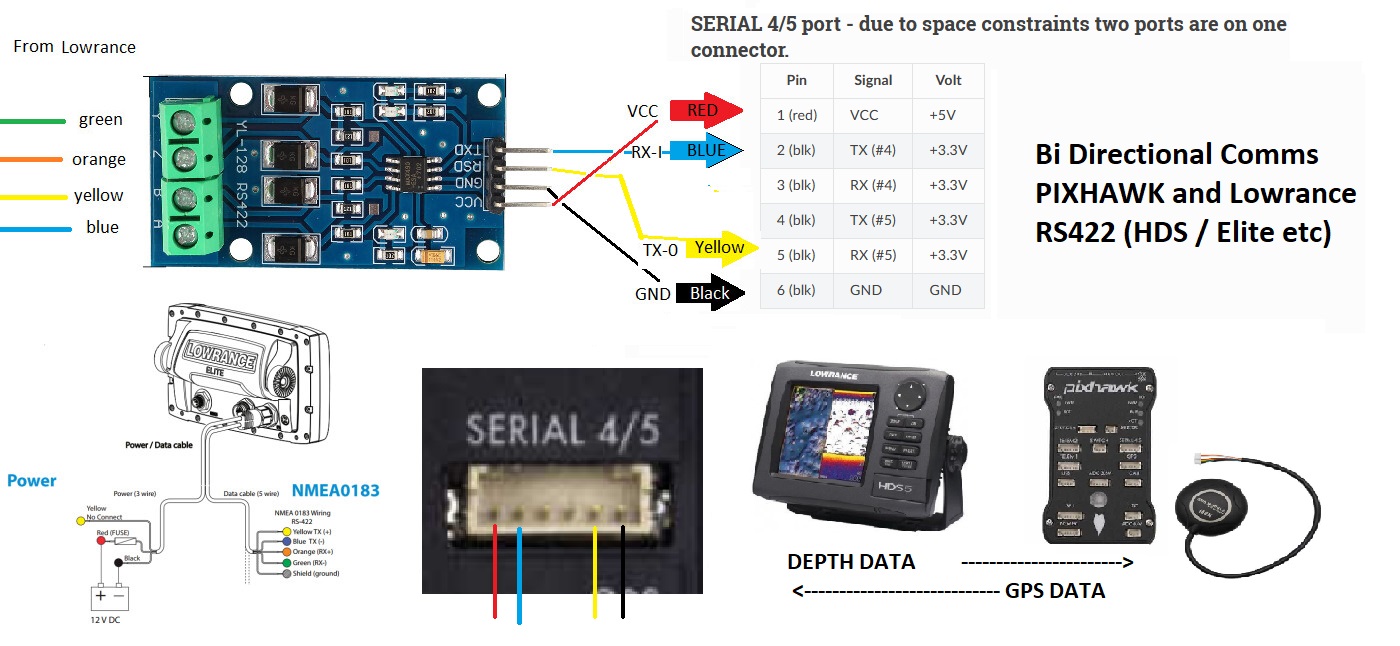
Ah, right of course … sorry I didn’t think this through. So on the autopilot side it would actually require using up two serial ports. One would use SERIALx_PROTOCOL = 20 (NMEAOutput) and the other SERIALy_PROTOCOL = 9 (RangeFinder) and RNGFND1_TYPE = 17 (NMEA) and then the single serial port on the sonar side would need to have its RXD pin connected to the autopilot’s serial port “x” (the one sending NMEA Output) and its TXD pin connected to the autopilot’s serial port “y” (Rangefinder).
With the autopilot’s serial ports in high demand this isn’t ideal clearly and we have a to-do item to allow multiple features/subsystems to share a NMEA port.
Thanks for pointing this out.
@rmackay9,
now it make sense, thank you for the clarification. I am looking forward to try it out, if our sponsor gives us enough financial support. If we get the stuff i will post an update on this thread. Thank you for your help.
2 Likes
I’ve found the reason why the GPS data wasn’t appearing in the lowrance. This doco above has a couple wires around the wrong way. It doesn’t affect the lowrance sending depth to pix, but it is on the receive wires - so lowrance wasn’t receiving correct data from the pix.
The green and orange need to be swapped at the RS422 adapter.
Previously I got bidirectional intergration (GPS and depth) working using a RS232 adapter, but i really struggled with the RS422. On the early HDS lowrance range, only the bigger units support RS232. But all of them support RS422.
The online doco is conflicting/poor on what Y Z A B pins are for so it took some experimenting to solve the puzzle.
2 Likes
Thanks for the feedback. So to be clear, you think that there is something wrong with the document above that is now on our wiki page here? So under the “Hardware Setup” there is a “From Lowrange Elite T2i” label and a blue RS422-to-TTL converter shown… and you don’t think the mapping from wire colour to 422 adapeter is really this?
- orange → Y
- green → Z
- yellow → B
- blue → A
Actually looking at the digram some more, surely the right side is incorrect. Surely the Blue and Yellow “TXD” and “RSD” fields are swapped too.
FYI @RDodds
Yes I 100% think there is a problem with the wiki. It doesn’t affect data from lowrance like depth, but if you like me and seems some others, want to feed GPS from PIX to lowrance, then if you follow the wiki - it will never work - and you won’t know that the wiring is wrong.
Per your other question, the right side pix wiring is actually correct (for the single use case above- eg depth ). For dual use case (eg depth into pix, and GPS from PIX into lowrance).
Yes I was fooled by this too. Usual practice and common sense says RX goes to TX. However I guess the RSD label means - “to RX” port on your device (eg PIX).
I have a RS232 to TTL adapter and it has the same “feature” confusing RX/TX labelling.
So for the YL-128 RS422 adapter
Lowrance cabling
Y - Green
Z - Orange
B - Yellow
A - Blue
When I get a chance, I’ll try to write up a simple guide for both RS422 and RS232 for bi directional comms with PIX / Lowrance. For bi directional comms, I needed to use 2 serial ports on PIX. I saw @rmackay9 previously talked about future feature using 1 serial port for 2 purpose, but I don’t think this exists yet ?
1 Like
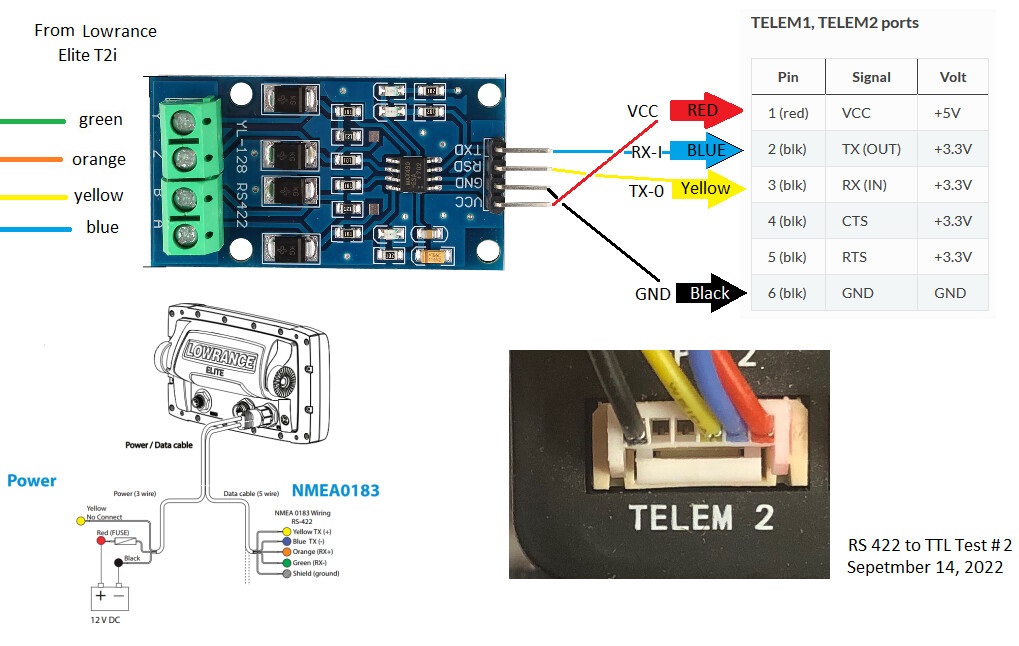
Here is original diagram with RS422 side fixed.
Couple notes
- This example uses a single serial port on PIX - so can only be used for 1 function at a time. Eg Depth from lowrance to PIX — OR ----- GPS from PIX to lowrance - but not both at same time. If need that - I will provide another - diagram.
- Also pay attention as my pixhawk serial port looks different to this pic. Check if pin 1 is on left or right for your model.
1 Like
Great work! As you have found, the documentation is less than stellar. For someone new to this the whole process can be very daunting. I was, at the time, focused on depth. Thank you for taking time to share this solution.