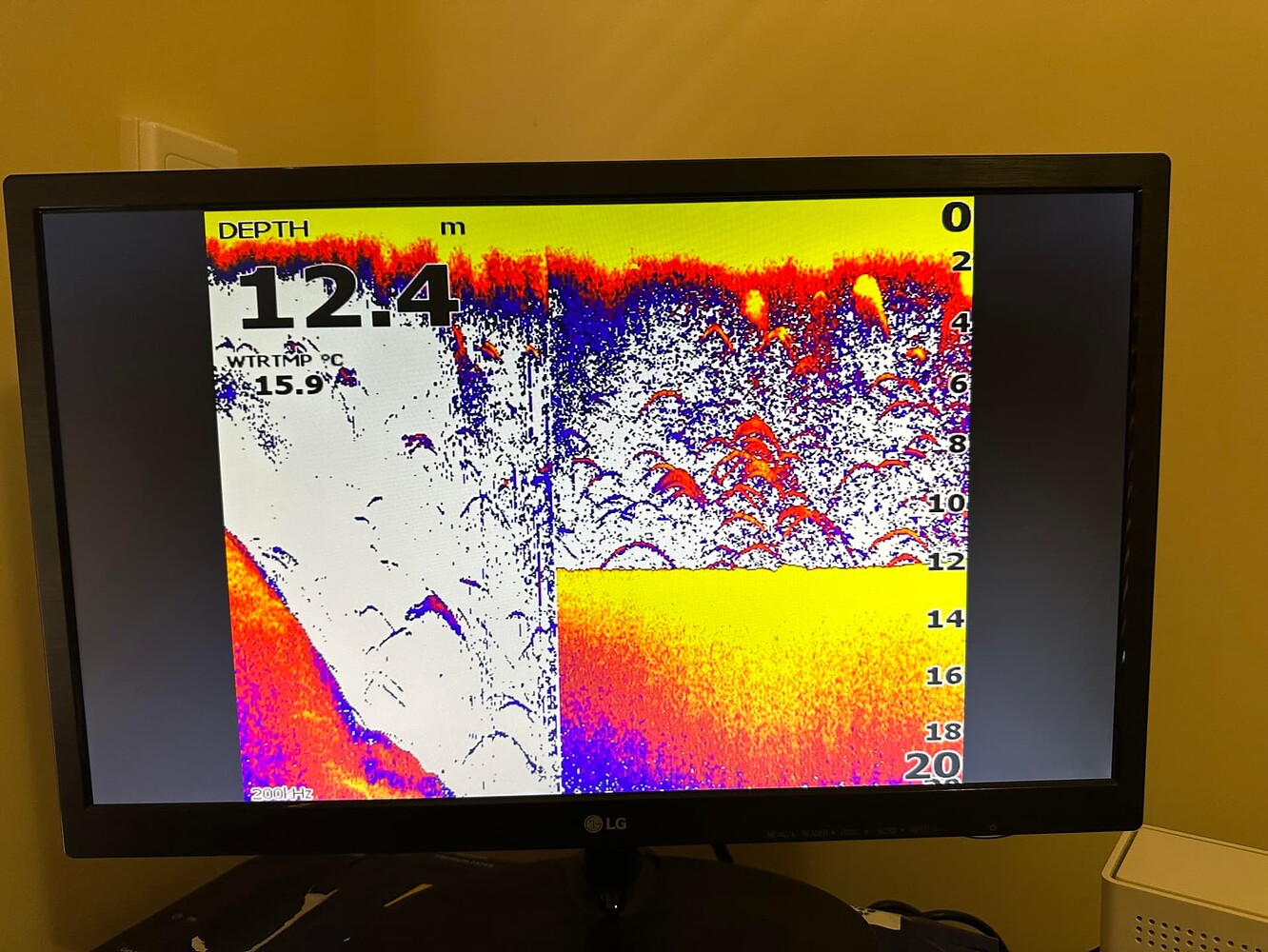
Many people have asked how I got the lowrance HDS to stream live sonar/structure scan video to mission planner and also a PC - so here is the info.
I’ve confirmed this worked with both newest HDS models and also the oldest lowrance HDS models.
Basically you need some kind of network connection between the PC and the HDS unit. A wifi bridge is the simpliest, 4G/5G works but can be slightly more complicated.
I found the lowrance HDS uses the protocol RTSP very similarly to an IP camera. However there was no documentation on how to access the lowrance RTSP stream. Using some creative methods I was able to crack the correct URL.
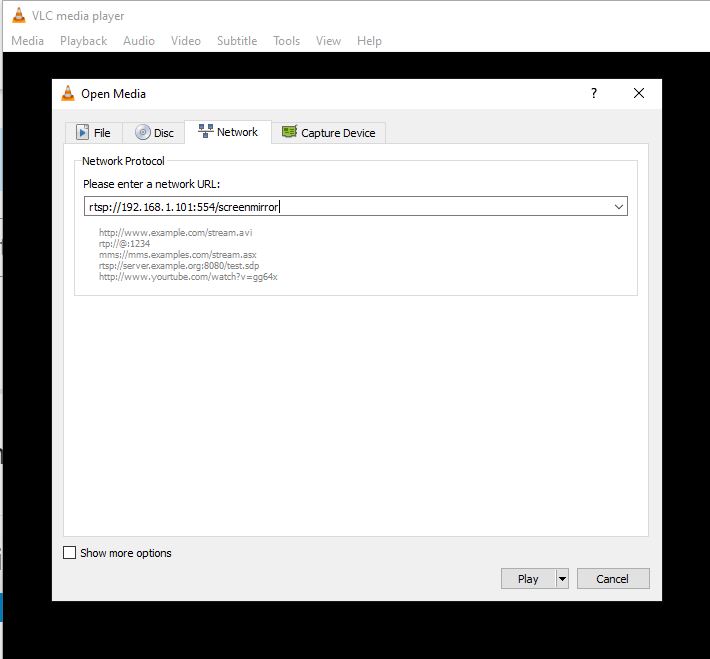
First get the IP address of the HDS unit using the screen itself, then I used this URL
rtsp://x.x.x.x:554/screenmirror
Example if the HDS IP address is 192.168.1.10 then the network URL is
rtsp://192.168.1.10:554/screenmirror
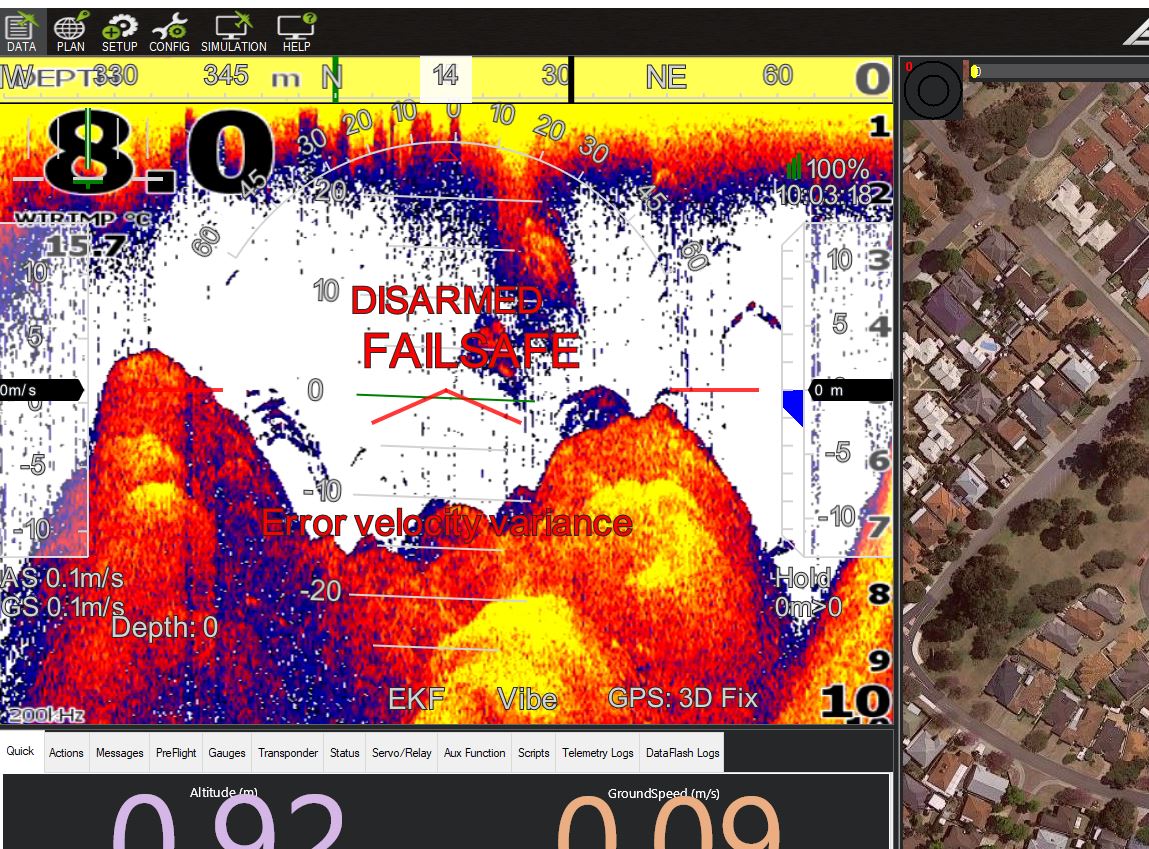
I know the video viewer app VLC allows connection to network streams, so I used that first to test. Once that worked, I worked on mission planner to get the sonar video to appear in the HUD window.
Here is the mission planner video settings that worked for me
How did you build your wifi bridge? I’m looking to do a similar project and am looking for a wifi range extender and am having trouble picking one out. Looking for a lightweight one to extend our signal by about 500ft.
I have to say a big thanks for your efforts on this. A a novice i would be completely out of my depth(excuse the pun) putting a Lowrance Elite4 in my boat without your guidance.
Just one quick question: Is it possible to connect the NMEA from sonar to Flight Controller to benefit from more accurate GPS AND transmit sonar imaging to GCS via Wifi at the same time?
Yes, you can also disable the original sonar GPS source, and you can also export the fused GPS coordinates from the FC, which is more accurate than the sonar GPS data.
The exact model is lowrance elite 4 chirp which I thought had nmea 0183 output.
I would like to use the sonar for mapping initially then to investigate particular areas with sonar imaging relating the image data either via mavlink or WiFi to GCS. Is this possible? And could you advise how to wire/set this up please.
Yes, this is very easy, you need a 422 RPM ttl module, turn the signal, you can connect the depth data to the flight control, I mean FS series does not seem to support 0183 GPS signal input.
you can have a look here Lowrance bi-directional sonar and nmea GPS working
Thanks for pointing me to the info. I hadn’t found this thread. I will read through and digest. I’ve already got an rs to TTL converter so will get fiddling.
Your project is quite interesting, and I have read up on some of your threads regarding interfacing a Lowrance to Ardupilot, as I have a similar goal. I am particularly in streaming the feed, ie sidescan remotely. I have an Elite Ti2 and tried the address that you provided, but that did not work. The IP is straightforward to determine, and if I am on the same network and ping the unit, I get successfull results. I wonder if port (554) and screenmirror portion of the address is different for the Ti2 than the HDS? How did you detrmine that portion of the address? Is is in documentation or did you use other means? (Bonus extra question: Are you able to remotely control the Lowrance ie start/stop logging, etc or just view the screen?)
Thanks for checking. I got it to work in VLC just as described. Next step is Mission Planner. On a related note, have you ever tried or had success in remotely controlling the Lowrance from shore via the Link app?
My test HDS is an older one that can’t be controlled by the app. However I’ve been thinking about ways to hack the system to be able control any HDS using a laptop.
My suggestion for ideal simple setup to allow reliable control / viewing from shore would be as follows.
On boat - HDS connected to 900mhz wireless bridge using ethernet cable
At ground station - 900mhz wireless bridge connected to 2.4/5ghz access point using ethernet cable
Connect phone wifi to ground station AP wifi. Launch link app.
All devices on same network subnet to make it simple.