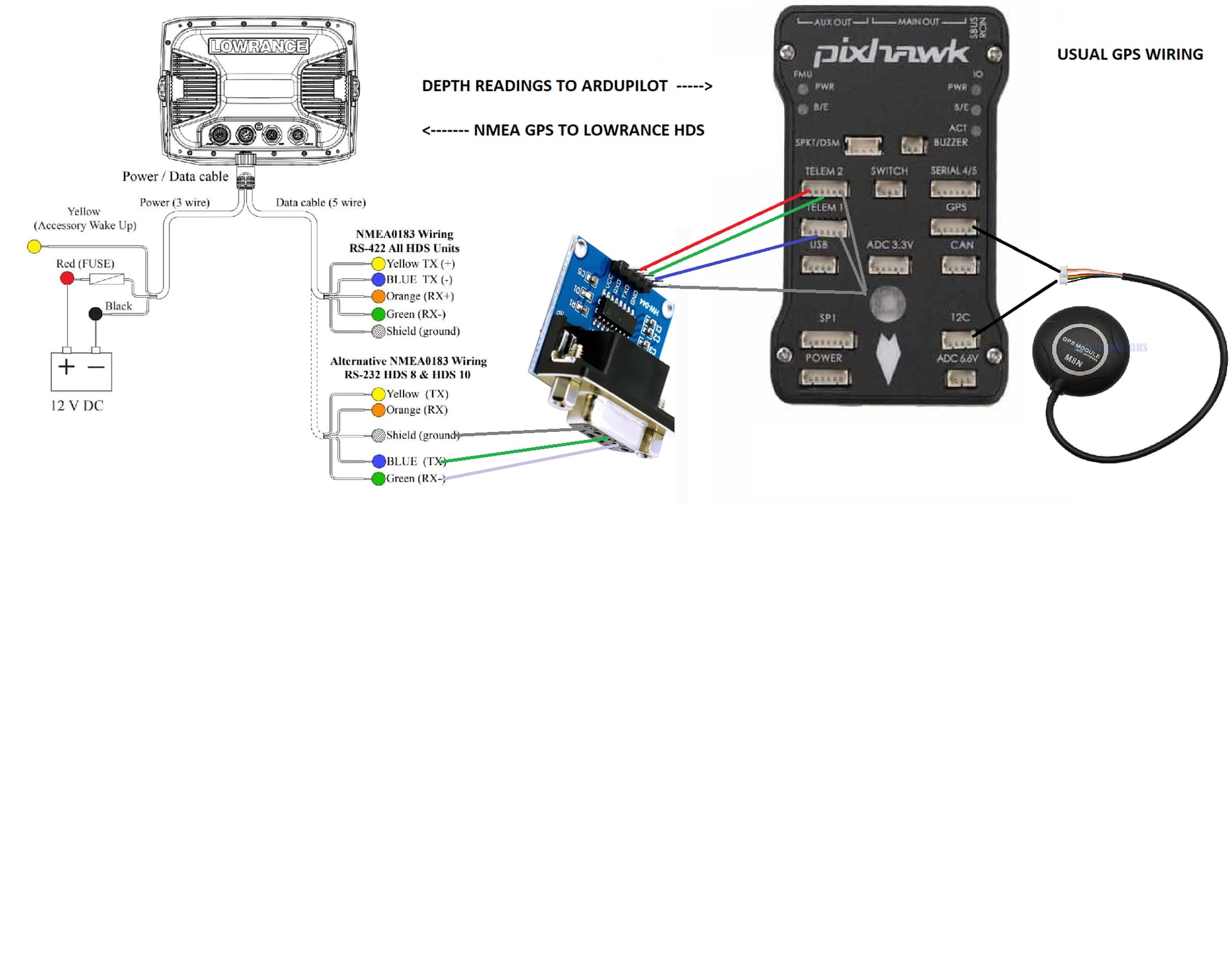
Ground wiring on RS232 adapter was important. TX/ RX didn’t work without ground wire attached.
Powering the RS232 to TTL adapter didn’t seem essential when sending from lowrance to pix NMEA sonar, but was required when sending from TTL to RS232 GPS. I guess it needs extra power to boost the signals ?
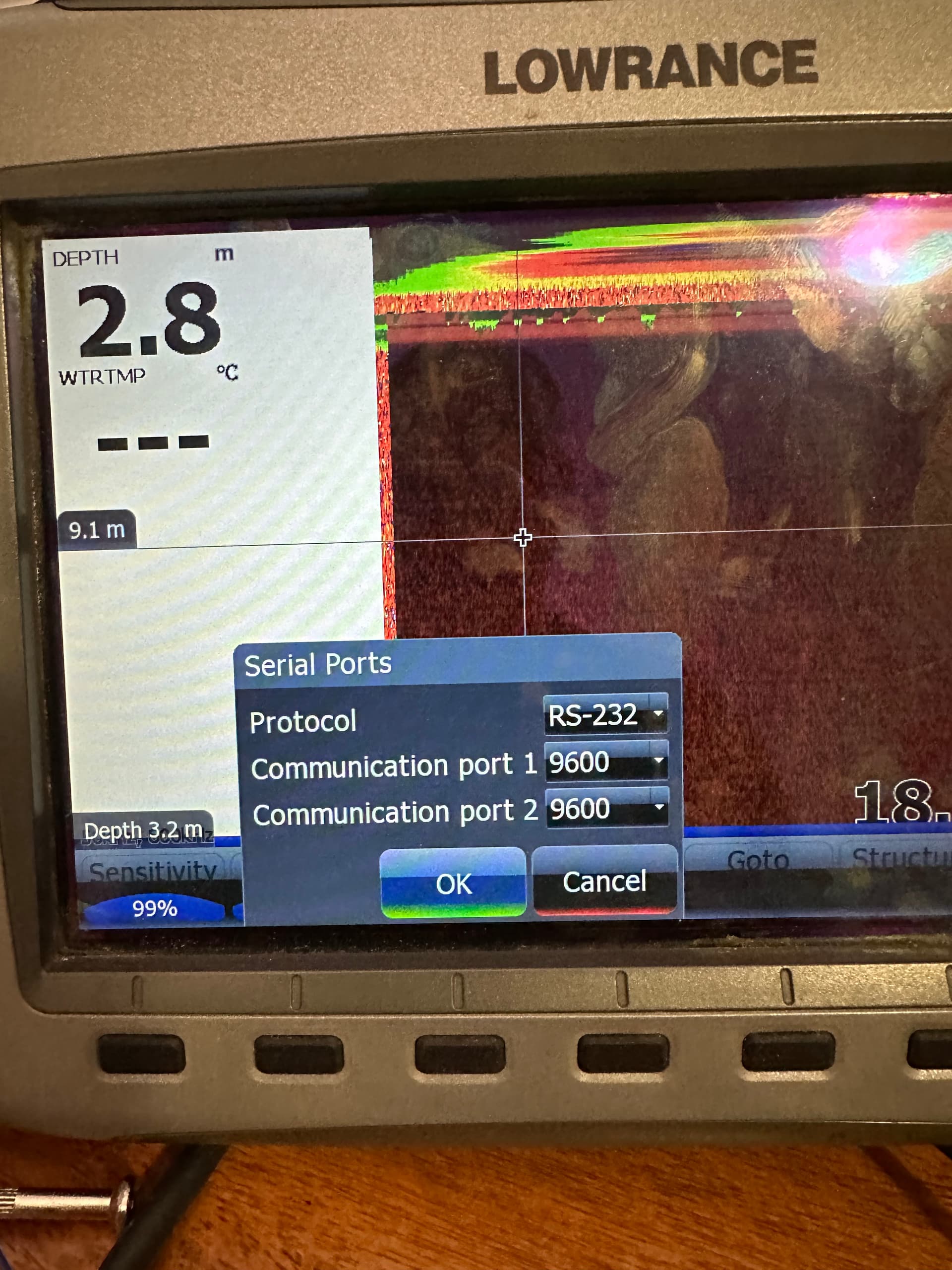
This test used RS232 because thats the only TTL adapter I had. I will migrate to RS422 because that seems more widely used. Eg only my HDS 8 supports both 232 and 422. Whilst my smaller HDS5 only supports 422.
I followed a guide to try to convert 422 to 232 without any special adapter but it didn’t work for me.
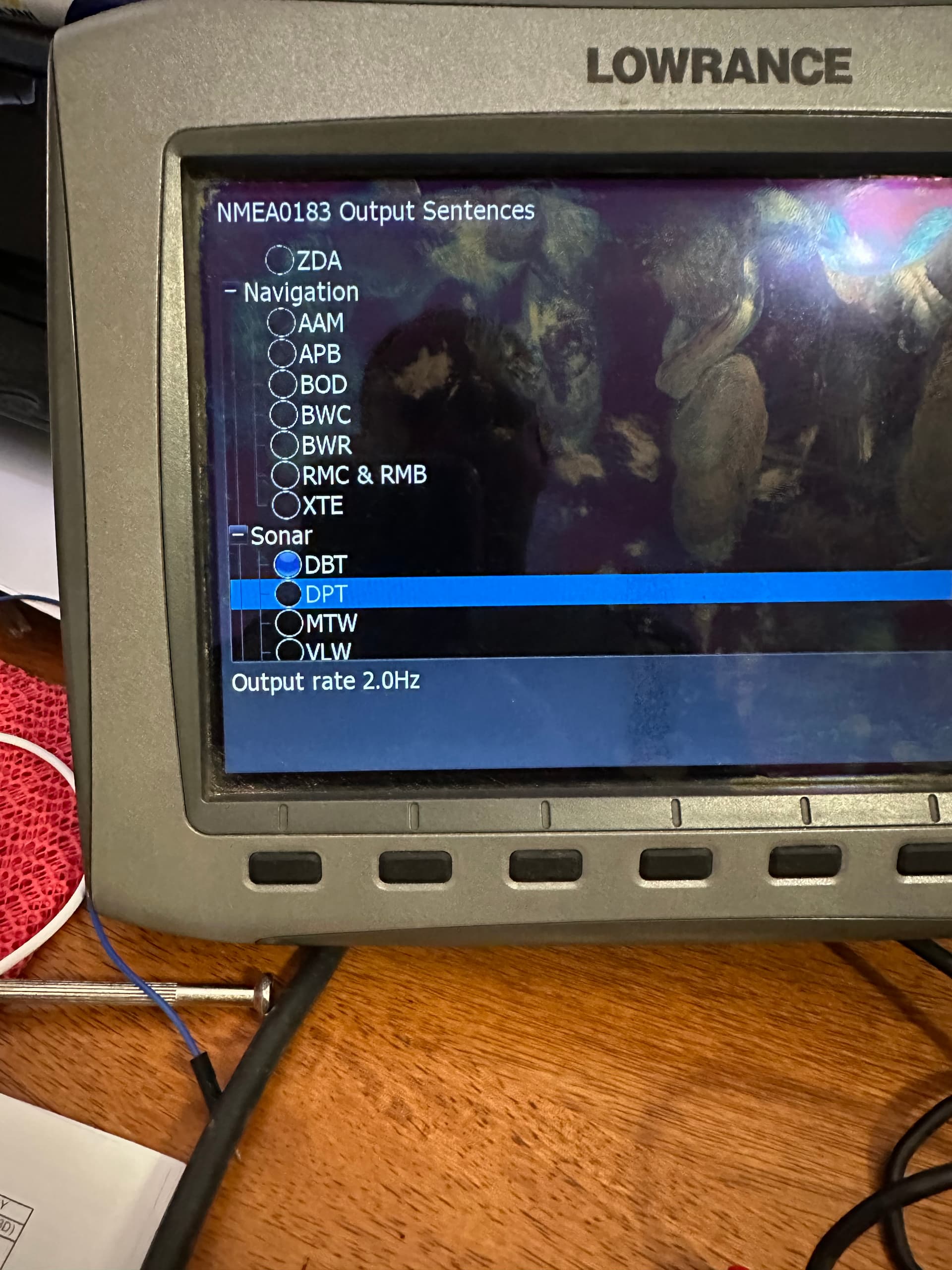
I think my thread is pretty much same as existing blog, except the bidirectional part. I didn’t see any write up on feeding NMEA depth out of sounder, and NMEA gps data into sounder.
Perhaps I can add some more parameters config, and then my info could be used for a footnote to existing wiki info.
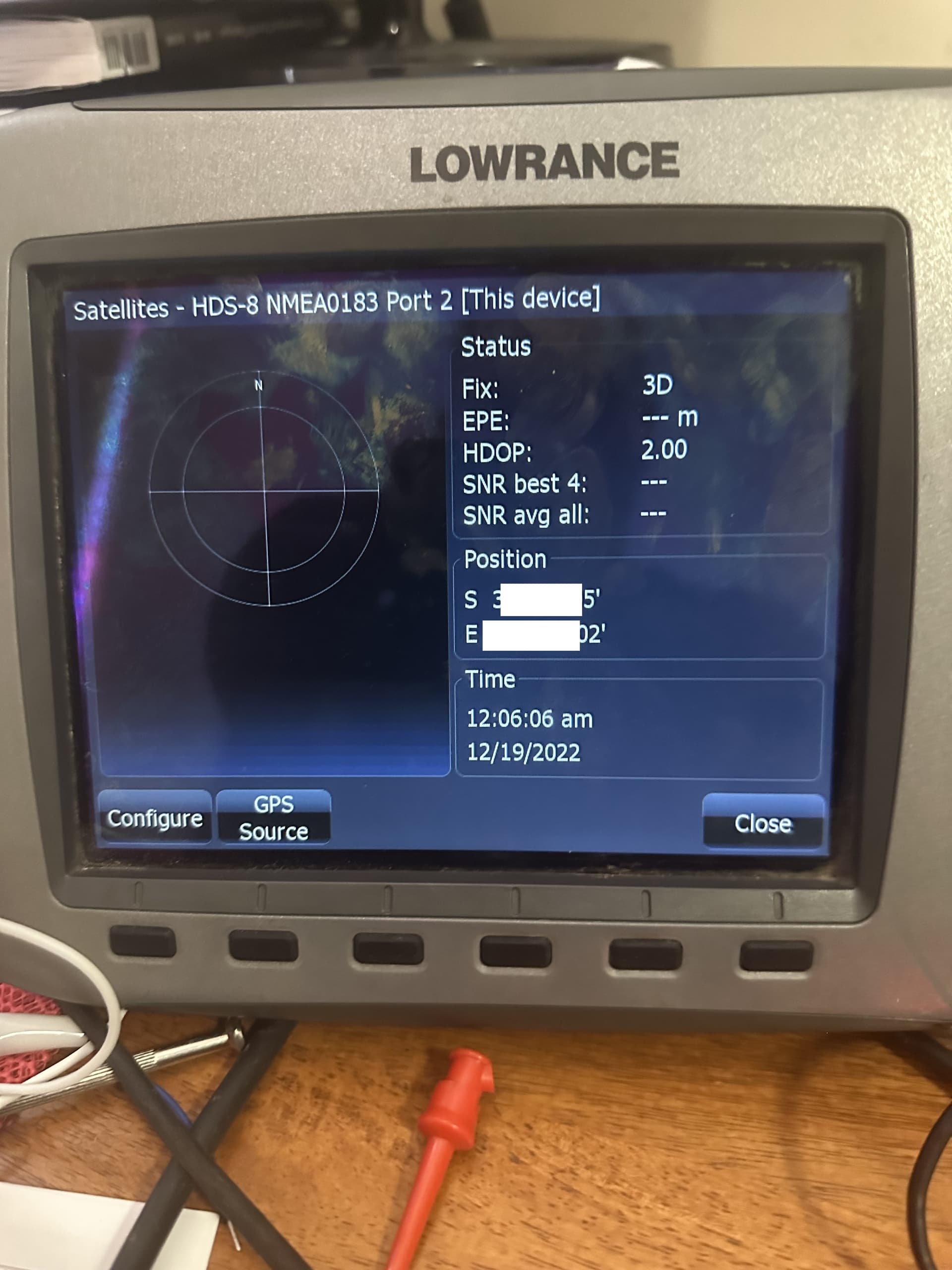
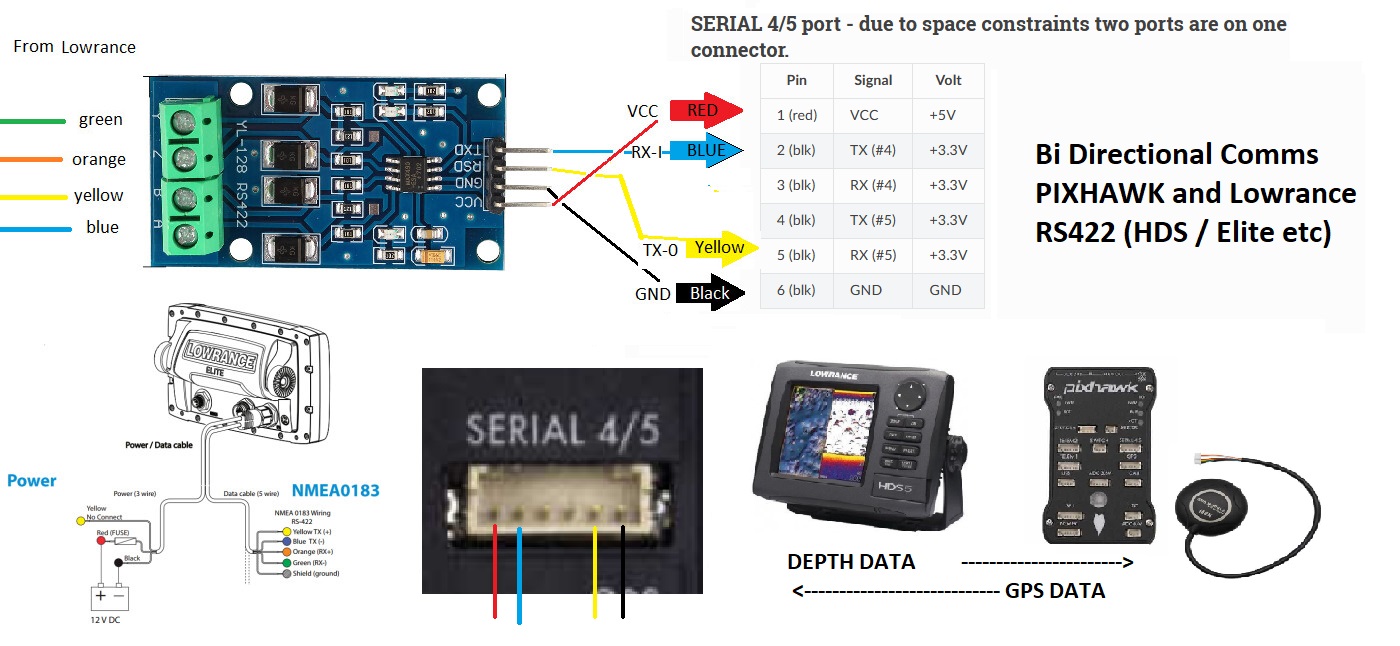
Good news - GPS into lowrance now works with RS422 adapters too (YL-128)
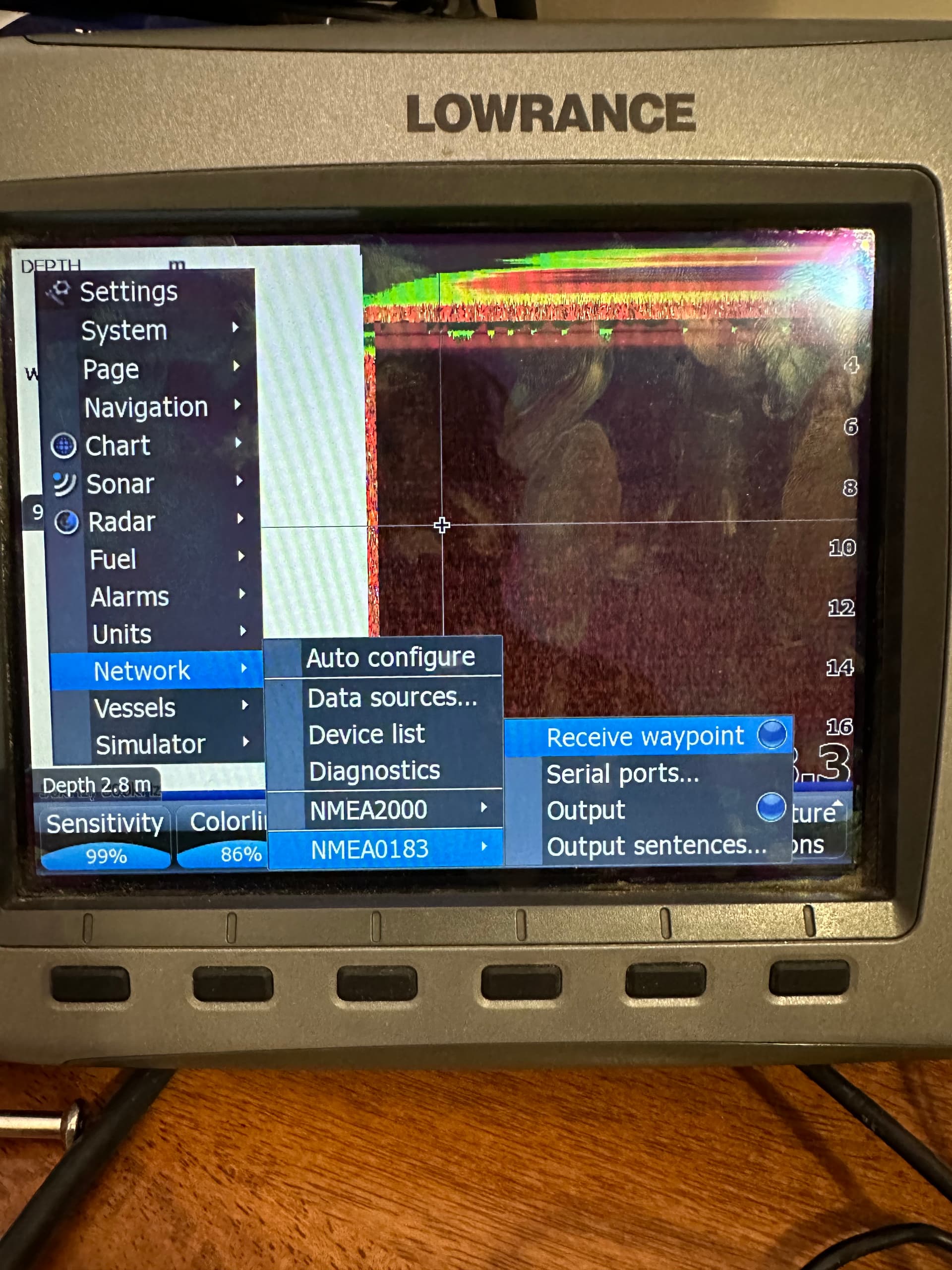
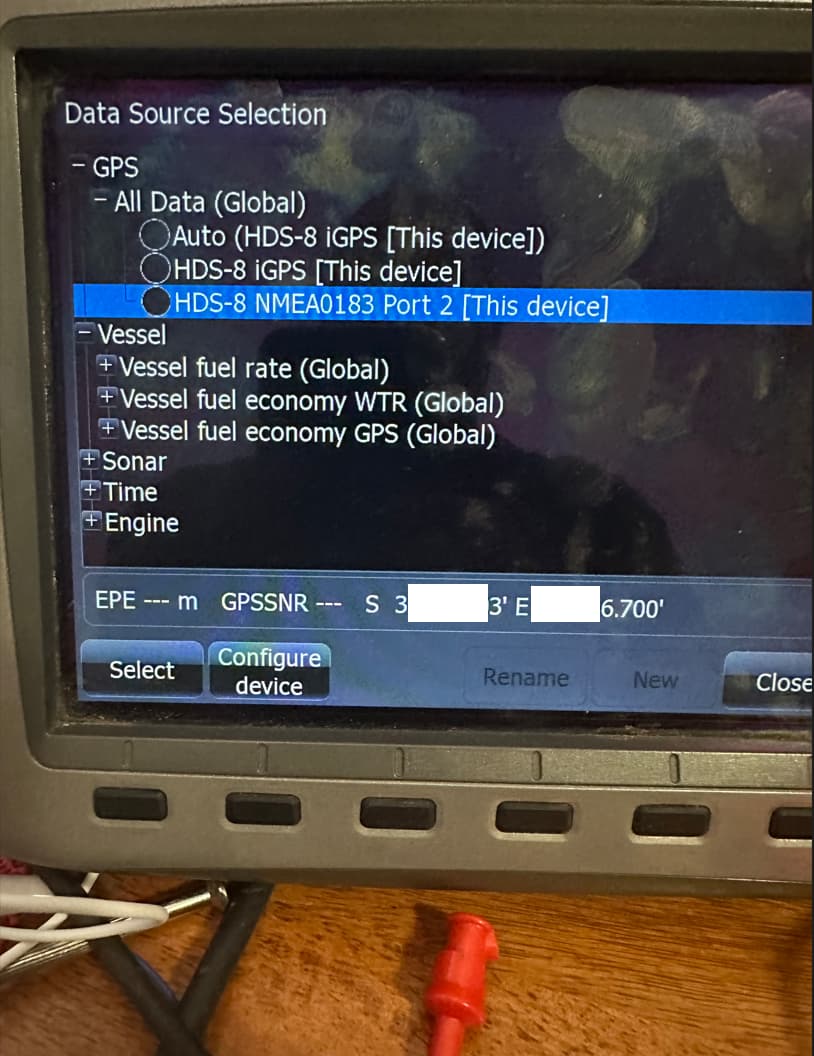
I found the existing lowrance wiring pics on this site actually had a wiring bug that broke data into lowrance, but didn’t affect data from lowrance (eg depth).
In short - I swapped the green and orange wires (lowrance RX+ and RX-) and now GPS input works perfect. You will also need a 2nd serial port on pixhawk if you need both depth output and GPS input simultaneously. In the RS422 example I used serial 4/5 (single connector). In the RS232 example I used serial 1 & 2 (2 connectors)
Thanks for the puzzle work mate! I straight away ordered two exact same yl-128 rs422 adapters and have good hopes that you solved the riddle.
I’m excited already for when they arrive.
It will take some time for the package to arrive (2 weeks maybe). And I’ll report back if I could get it to work on my older lowrance elite ti.
@admired thanks for finding the typo. I updated the above to protocol 20.
I’m not an expert on the serial 5 reserved for debug. Maybe others can share their knowledge. I did google search before I used it, and I got the impression that older versions of ardupilot reserve serial 5 for debug but now its open for user use.
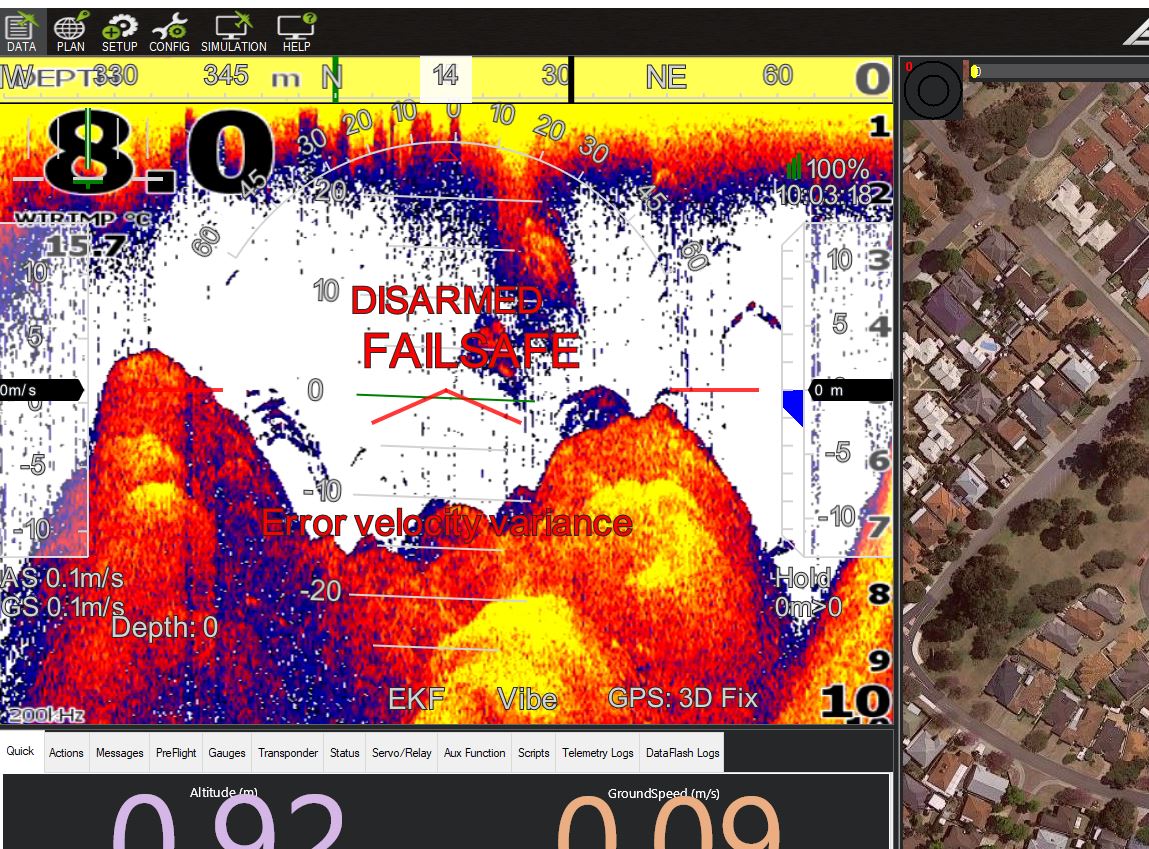
I’ve managed to hack the lowrance to output the live full sonar data to mission planner. This doesn’t use the nmea serial ports, but uses wifi. No camera required.
How did you get the signal off the sonar screen? Can you explain your implementation process in detail? Thanks a lot, I’d like to take a look at your ideas and see if my HUMMINGBIRD HELIX can be modified in the same way, especially if you can push buttons remotely.
Google says Ethernet networking capable models include HELIX 7 G4N, all HELIX 8, 9, 10, 12, and 15 models, all SOLIX and all APEX models, as well as many Humminbird legacy models.
If your model doesn’t support ethernet, your only video solution might be a camera pointed at the screen. Or maybe move to a model that works if you really need full live sonar data.
Yes, I have just read the official documents, and it is true that many models support Ethernet, but the annoying thing is that the lowest end HELIX5 I am using now does not seem to support it. I have been trying to get the signal from the screen position and then use the form of picture transmission for remote viewing, which may be very troublesome.