Spring has finally arrived and the Canadian Goose are back , so I guess it is time to fly outdoor again. Working on a new build , I look at the options for a Lidar based RangeFinder that are be reliable in the flight envelop for my experiments with mixed GPS and Visual Odometry that range from 0 to 40 meters. Few models are compatible for ArduPilot , as showned in the WIKI and price being an issue for any hobbyist, I tend to look for the best bang for the buck.
Since 4 years , I fly with the Garmin Lidar Lite V3 that offer a good range and accuracy for a price tag that is quite appealing (130$ as of may 2020). The downside is the bad reputation that this type of range finder has inherited from the older generations (V1 nd V2) that had a tendency to output erroneous readings at certain altitude as explained here https://ardupilot.org/copter/docs/common-rangefinder-lidarlite.html#problems-with-the-lidar-lite-v1-v2 . This disfunctione never happened to me , but it does not mean it cannot.
Since a few time, BENEWAKE is offering some pretty cool lidars that are affordable and well adapted for our application. I did some interesting integration with the TFMINI like the POC Avoidance Experiments with the POC and Benewake TFMINI , that I plan to revisit in a few weeks and adding with new features .
The drivers for the TF series are available for ArduPilot and you can use them with the usual method on Mission Planner or other GCS.
https://ardupilot.org/copter/docs/common-benewake-tfmini-lidar.html
https://ardupilot.org/copter/docs/common-benewake-tf02-lidar.html
So I decided to give the TF02-Pro a try and compare results with the Lidar lite as both have quite similar profiles , and the BENEWAKE is available under 100$ US , making it an interesting option:
More info ton the Benewake site: http://en.benewake.com/
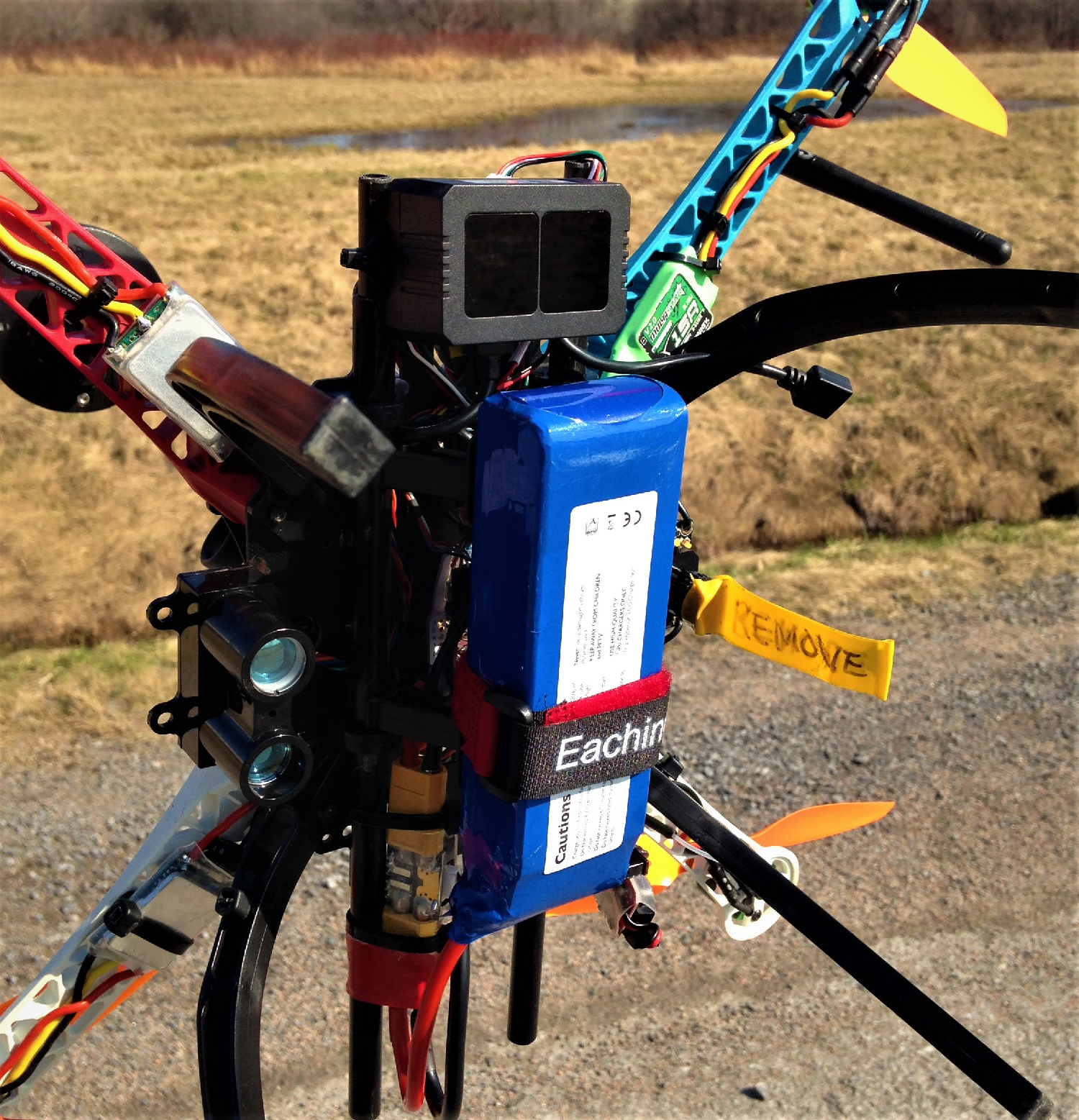
Test RIG:
Looking at pic above, installed both LIDAR on my ‘‘MULE’’ , a 450 FireWheel that has been modified so many times, but with cheap replacements parts it makes the ideal crash test dummy.
Here is the configuration:
Lidar Lite V3:
RNGFND1_FUNCTION,0
RNGFND1_GNDCLEAR,10
RNGFND1_MAX_CM,4500
RNGFND1_MIN_CM,10
RNGFND1_OFFSET,0
RNGFND1_ORIENT,1 == Looking Forward right : 45 Deg
RNGFND1_PIN,-1
RNGFND1_POS_X,0
RNGFND1_POS_Y,0
RNGFND1_POS_Z,0
RNGFND1_PWRRNG,0
RNGFND1_RMETRIC,1
RNGFND1_SCALING,3
RNGFND1_STOP_PIN,-1
RNGFND1_TYPE,15
BENEWAKE TF02-Pro
RNGFND2_ADDR,0
RNGFND2_FUNCTION,0
RNGFND2_GNDCLEAR,10
RNGFND2_MAX_CM,4500
RNGFND2_MIN_CM,10
RNGFND2_OFFSET,0
RNGFND2_ORIENT,7 == Looking forward left : 315 Degs
RNGFND2_PIN,-1
RNGFND2_POS_X,0
RNGFND2_POS_Y,0
RNGFND2_POS_Z,0
RNGFND2_PWRRNG,0
RNGFND2_RMETRIC,1
RNGFND2_SCALING,3
RNGFND2_STOP_PIN,-1
RNGFND2_TYPE,8
Note on orientation : 0 to 7 (0=forward, each increment is 45degrees more in clockwise direction)
Benewake was using the "Generic Serial Range Finder’’ driver#8
Testing Method:
The test was executed at noon on sunny sky and with a light eastern breeze in my nearby field that was still very wet and full of pounds made of melted snow, best resting place for ducks during their spring migration. So I just lifted to maximum speed and did some stretch across the field to check how each sensors reacted.

For this test I wanted to have response frome sensors being easily displayed on the logs. The easiest method to achieve this is to use the proximity message as we can set the 2 devices looking at different azimuth and compare their distance on the same graph. So lookin at the log below we can see signals from Lidar Lite V3 at the 45 Deg message and the TF02PRO at 513 Degs
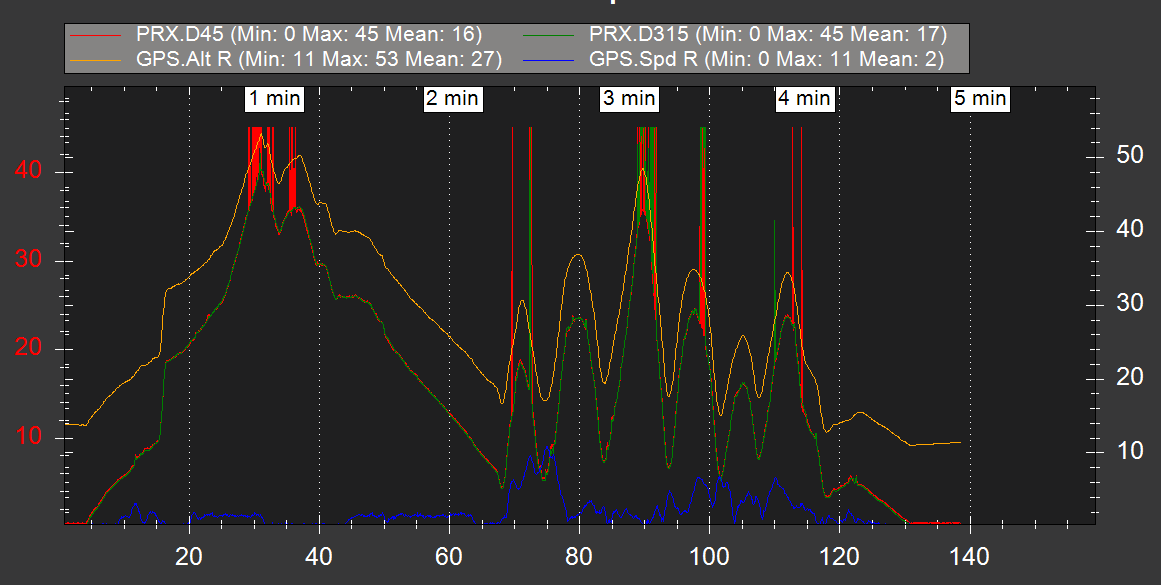
Results analysis
While not scientific and based on a very limited set, we can still conclude that both sensors have similar accuracy and repetability. We can see some marginality from the LidarLite at the upper limit and bothe are getting errors while flying over water and getting reflection from water (and sun reflexion as well).
Conclusion
If you are looking for a low cost 40 Meter plus capable Lidar with good accuracy and range, the TF02 PRO might be a good option.


