I am Having a little bit of an Issue with Oscillations in a new Quad that I have built. I have tried autotune but that didn’t help a whole lot.
I come from the DJI flight controller world for about 8 years.
I recently bought and built a large Octo and Quad. Both Running CUAV V5 flight controllers.
I am have a very hard time getting my quad to fly as well as my DJI A2 powered one.
Details:
Tarot 650 Frame with longer motor mounts. Total diameter is about 800mm roughly
4s Battery
4006 Motors with 13" props
CUAV V5 Nano
36Amp ESCs running Dshot 600
Flight controller is mounted on a anti-vibration mount (two carbon plates with rubber isolators on all 4 corners
Motors get very hot, almost too hot to touch after only 3-5 mins of stabilized hovering.
I can watch the compass and the flight controller vibrate and I can hear it in the motors.
I have included a link to both bin files (one using default PIDs and one after auto tune) I am also including a link to a video that I took.
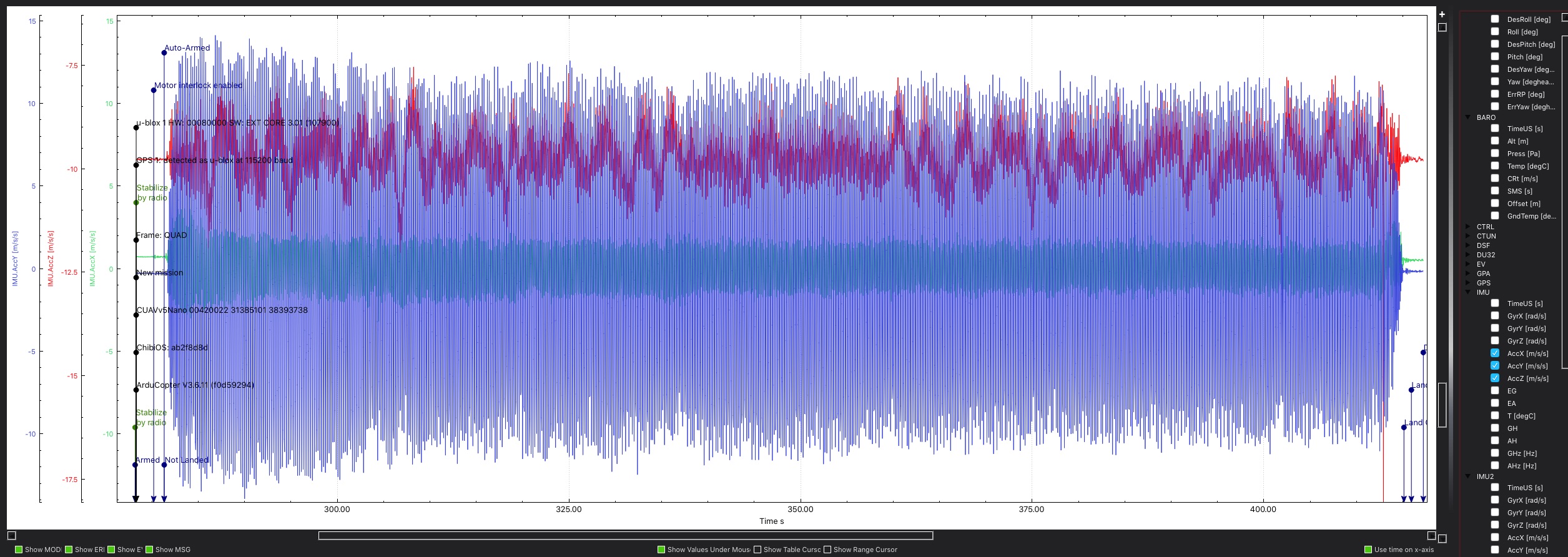
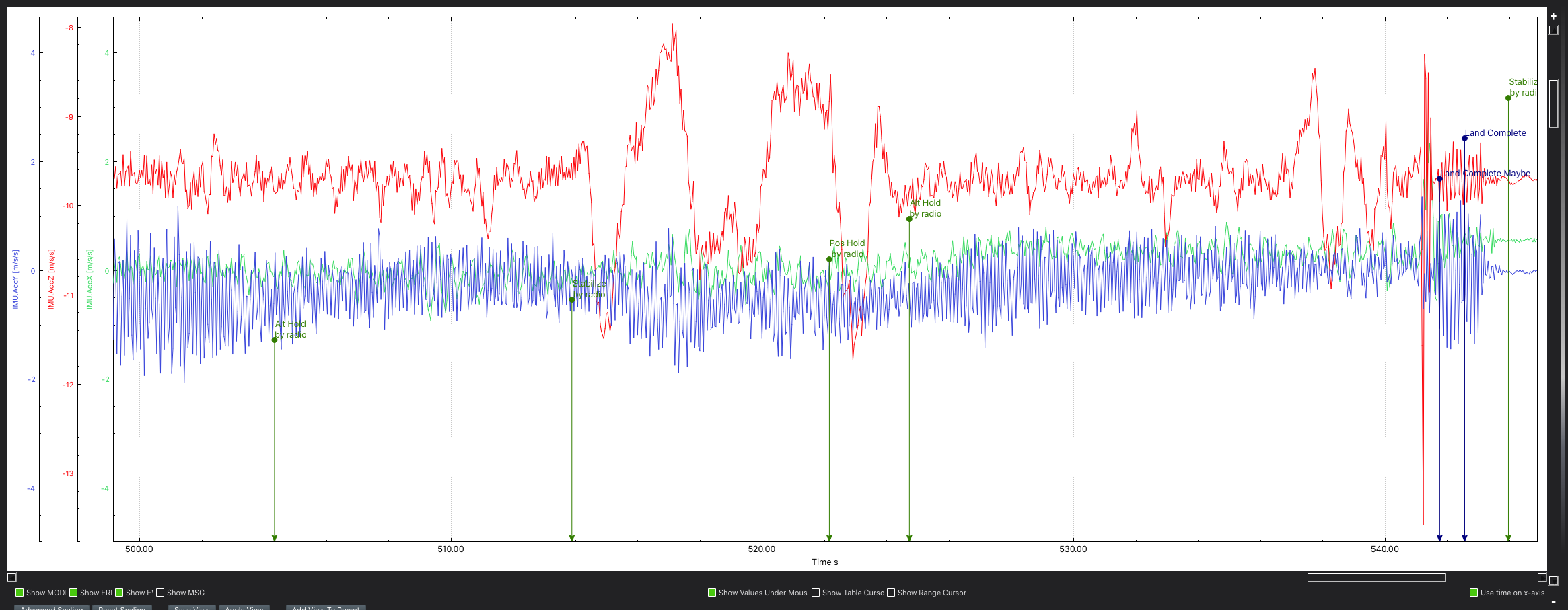
I am no expert in examining the logs, so not sure what I am looking at. However if I look at the Vibe values I can see that Z and X have a max of 6 and a mean of 4, but Y is 25 with a mean of 19
You also have some major Y axis vibrations.
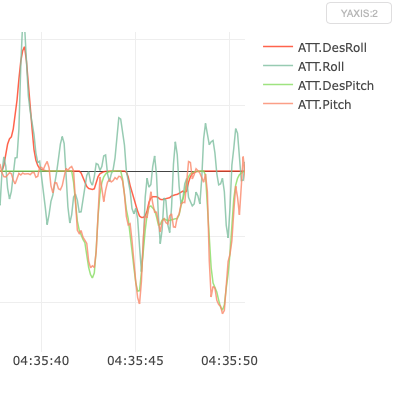
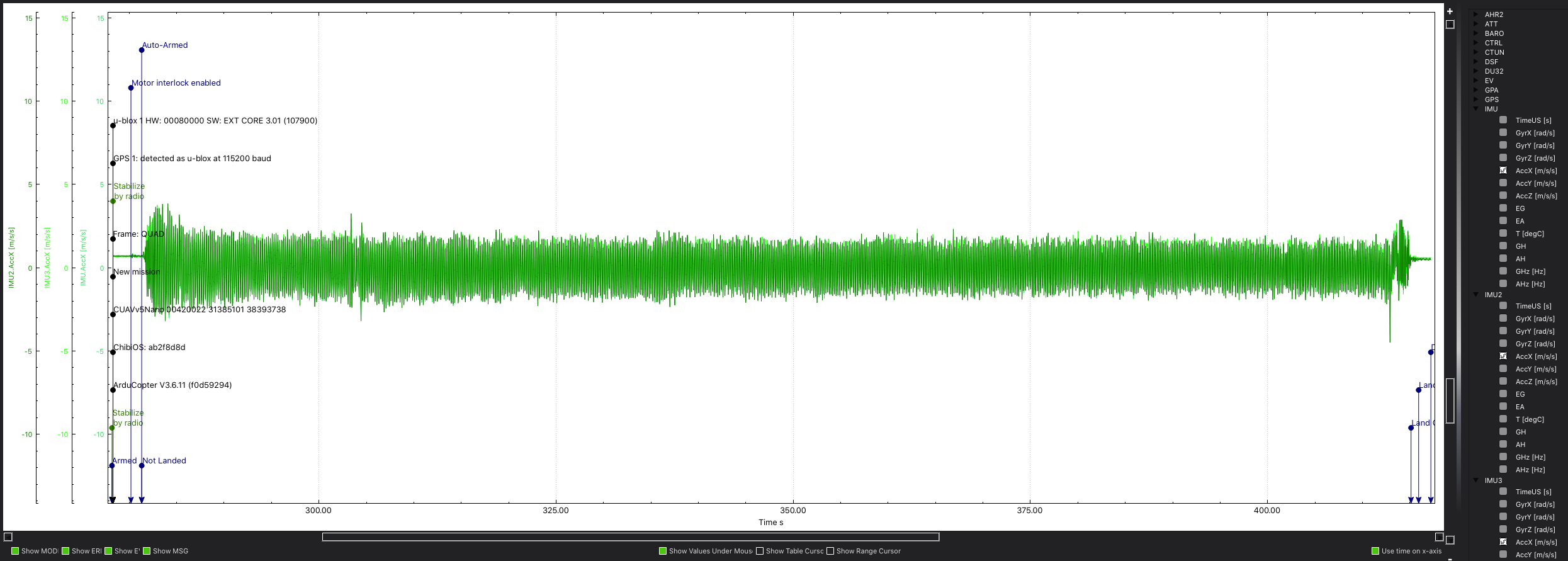
Even though they are not causing clipping and the VIBES data is not too high the raw IMU shows a different story.
How balanced are your props?
Is everything on the frame tight and rigid?
Is anything (eg: loose wires) touching the FC?
Improve the vibration damping on the FC
Try another autotune but reduce the aggressiveness to .05
I took a short flight today after make the following changes last night
Rerouted Compass lead so it was not resting on the FC
Dropped the ‘d’ value for pitch and roll
Made sure everything was tight and motors were 100% level
Dropped Dshot to 150
This flight was much better, the motors sounded normal, and after about 10 mins of flying the motors were not even warm to the touch.
There was no noticeable vibration in the compass mast nor on the FC
Definitely moving in the right direction.
I got up in the air, started an auto tune then it started getting windy so I had to abort the AT.
I went out a bit earlier today and saw quite a bit of vibration in the FC and plate.
I noticed the compass was back to vibrating.
The compass was mounted on a plate on one of the arms. Thinking that this might be part of the problem, I moved the compass to the main plate. I also stripped back about 3 inches of the compass cable insulation as it was quite rigid.
After I did the I took a test flight. The FC appeared to be perfectly stable with zero vibration. The compass also was not shaking. Position hold held the quad almost perfectly, so huge gains there.
I am thinking auto tune was fighting itself the whole time with the vibrations in the FC.
That really looks like a Hexacopter frame to me, and if you are using it as a quad, the motors are going to be in the WRONG places when you unfold the arms. This is going to wreak havoc with the PID controllers.
It’s an Ironman 650 quad. I have over 10 years of flying drones from little 250mm all the way to 1300mm octo’s. But this is the first time I am not using a DJI FC.
The motors do spin the proper direction so no problems there. I think after removing the vibrations, the last thing I need to do is the auto tune as @mboland has been saying. I just haven’t had the time