I’d expect there to be some differences in flight mainly due to the Angle P increase and thrust expo change.
True, we can all agree on that  more filtering than necessary can introduce lag in the PIDs, filter real movements the FC should react to, or cause excessive CPU load for no good reason.
more filtering than necessary can introduce lag in the PIDs, filter real movements the FC should react to, or cause excessive CPU load for no good reason.
INS_ACCEL_FILTER,10 is the new default value we are using these days. It’s not changed to default in parameters, still at 20, because of the large number of big expensive copters using the old value of 20. Changing this to 10 during a firmware upgrade could have a negative effect on some copters.
For the rest of us 10 is fine, and a very good starting point. It’s not like the Gyro filter where you might increase it to get some better, more sensitive attitude control.
Usually with INS_ACCEL_FILTER,20 you would see slightly more nervous behaviour if your copter was sensitive to the accel filter value. Feel free to try again with 20 , as there’s nothing wrong with using 20.
The Accel filter would not usually affect motor temperature either, unless it was somehow causing excessive oscillations.
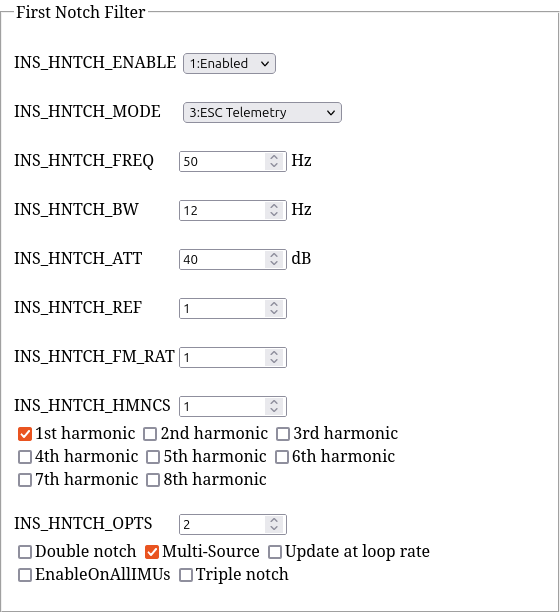
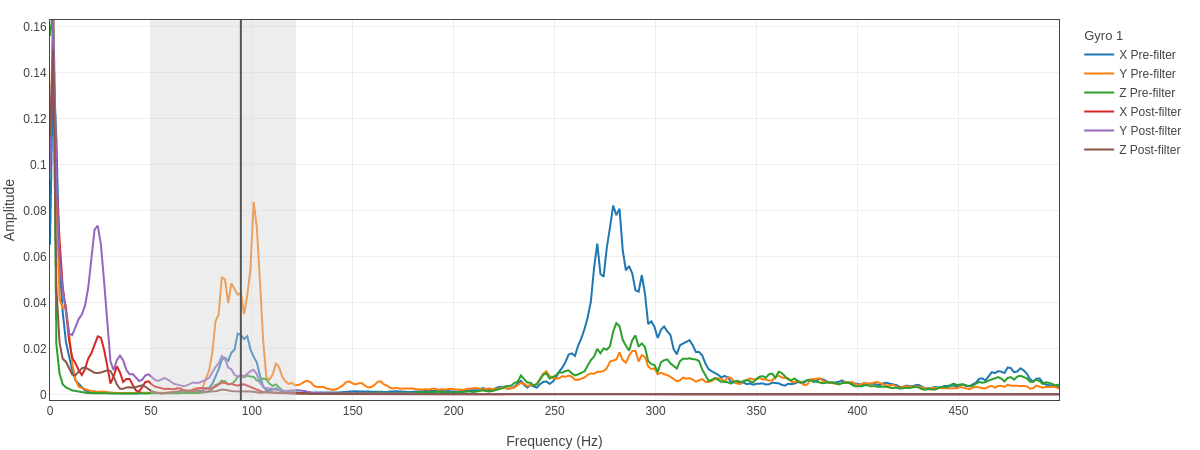
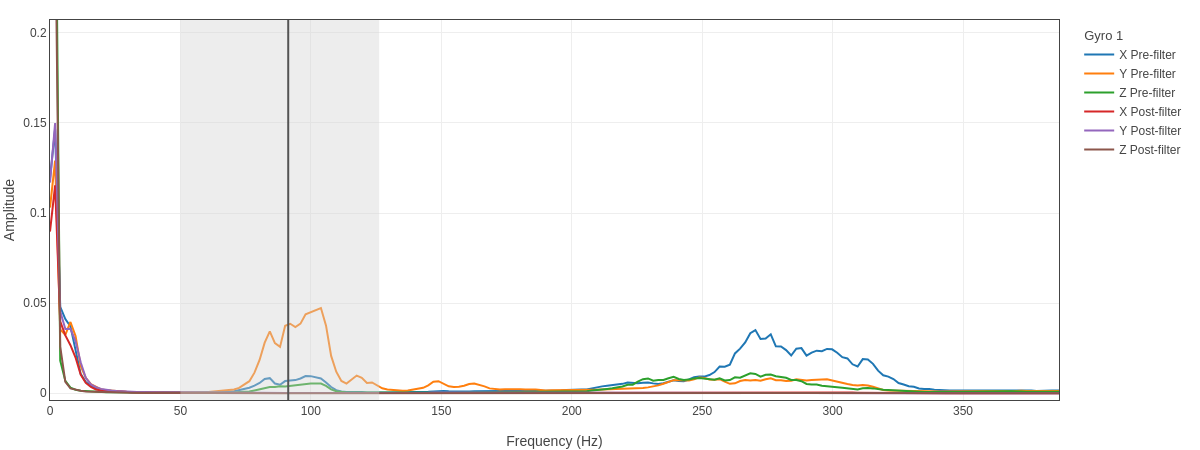
The filters that DO make the most difference to attitude control are the Gyro and harmonic notch filter, and yours is already working perfectly:
And the PID’s are what make the most difference to motor temperatures, assuming the motors are good for the thrust demands. In particular the Rate D term value, and even it’s proportion to Rate P.
I suspect the motors might have been warmer before because you had quite low (default) Angle P terms, and I think this was forcing the Rate PIDs to work quite a bit harder than they should, but we didnt have the PID logging turned on then.
Since increasing the Angle P’s I suspect the Rate PIDs have settled a bit.
In the most recent log the attitude control seems at least as good, if not better and smoother, which is very good given that there is more wind.
One other thing I compared (one of many) is the GPS speed when RC inputs are neutral, when position should not be changing. In the most recent log that GPS speed is fractionally higher or noisier during those periods, which could be from the wind, or even GNSS conditions (that vary from day to day)
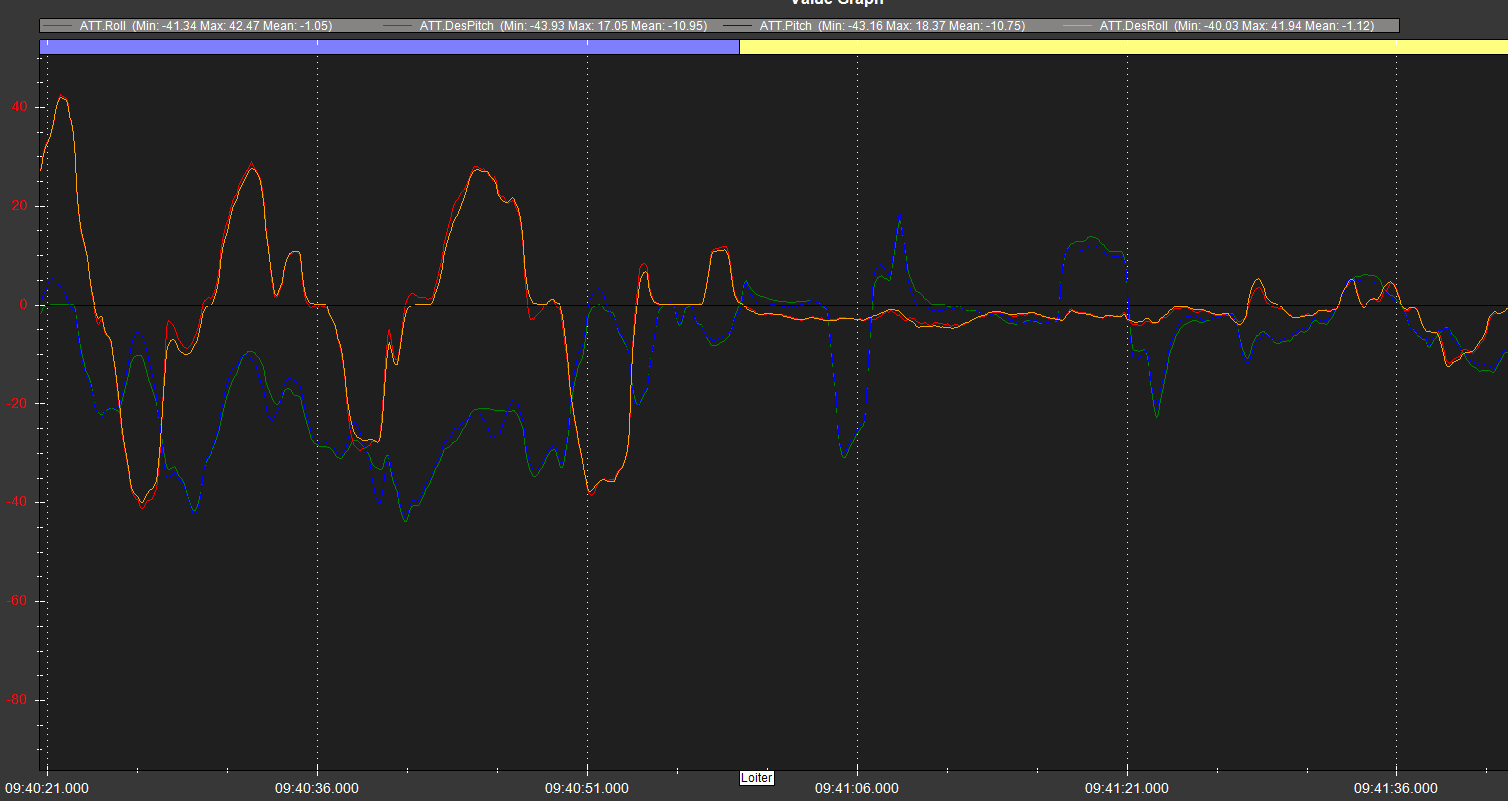
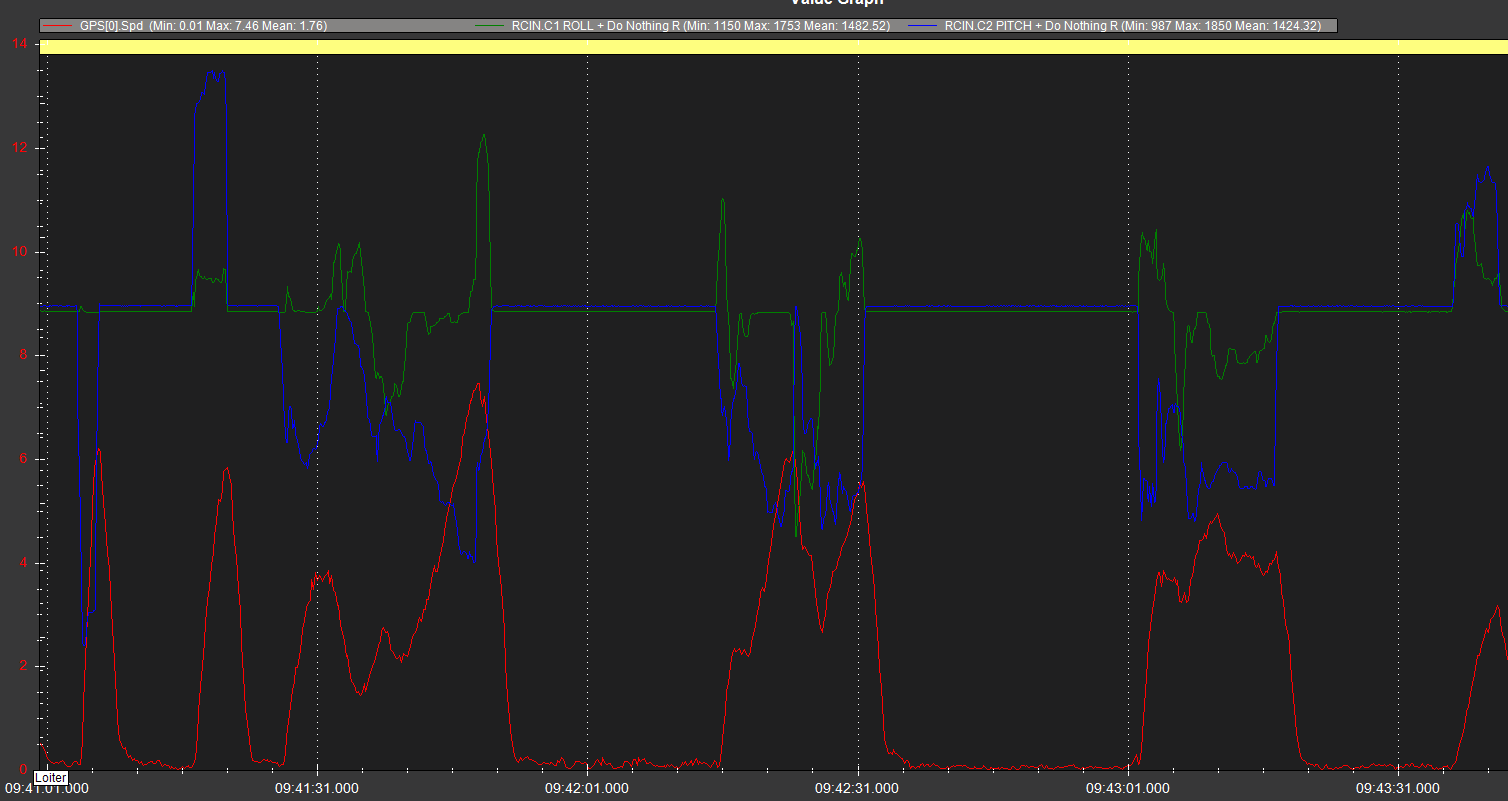
earlier flight
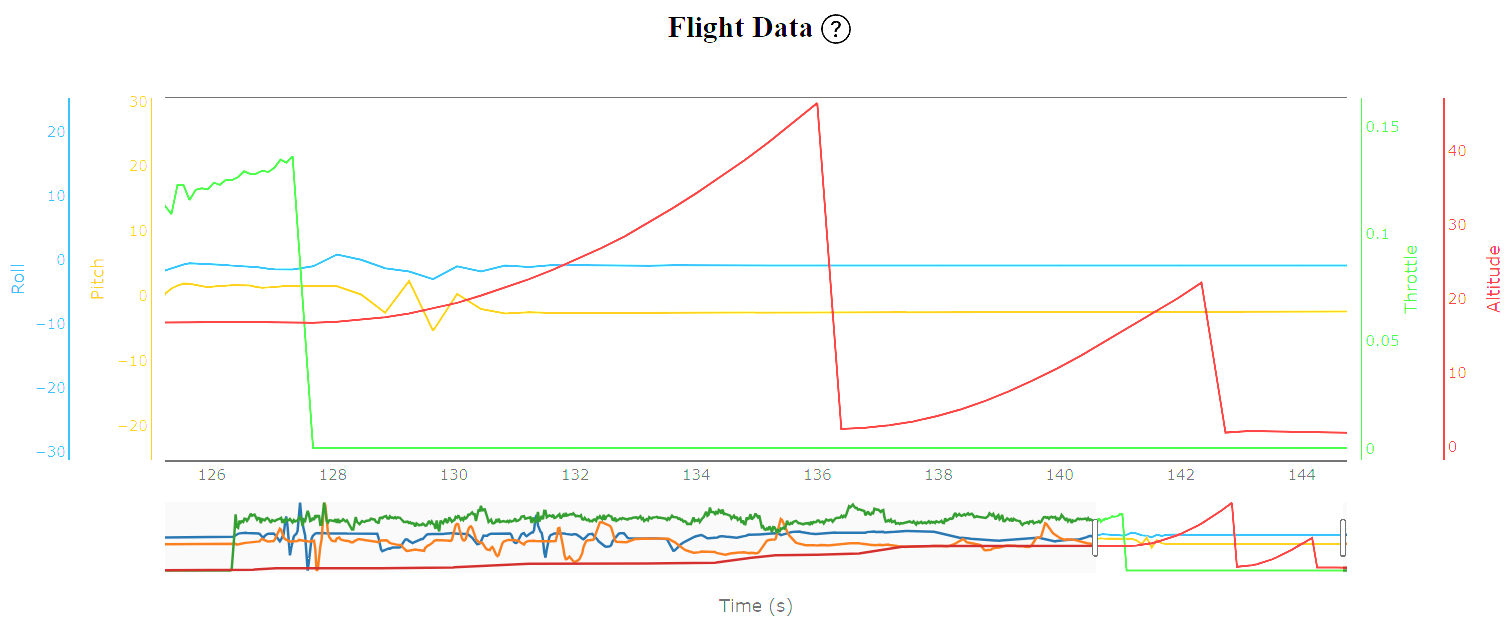
Attitude control
GPS speed vs inputs - during neutral stick, average 0.06 meters per second
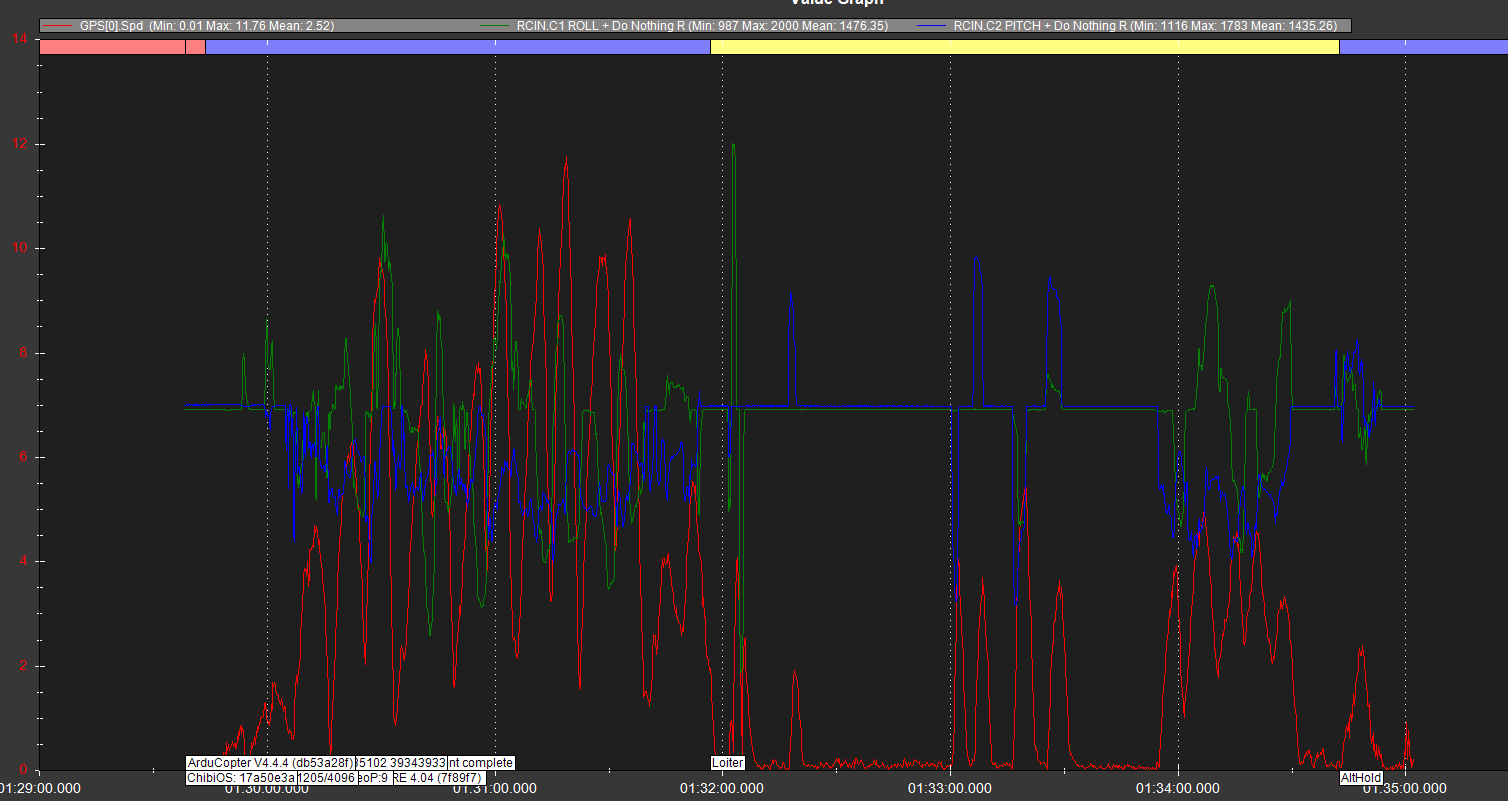
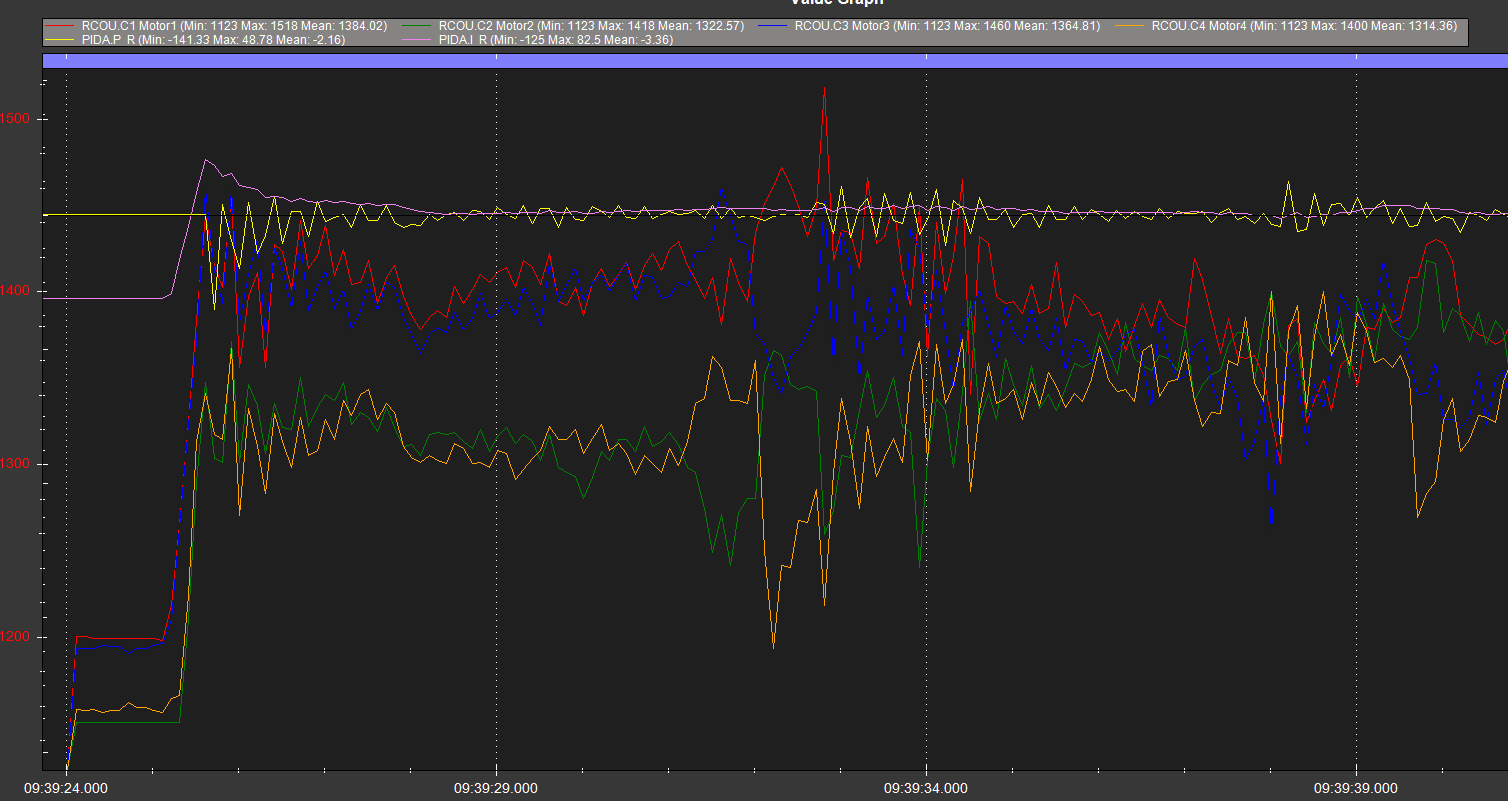
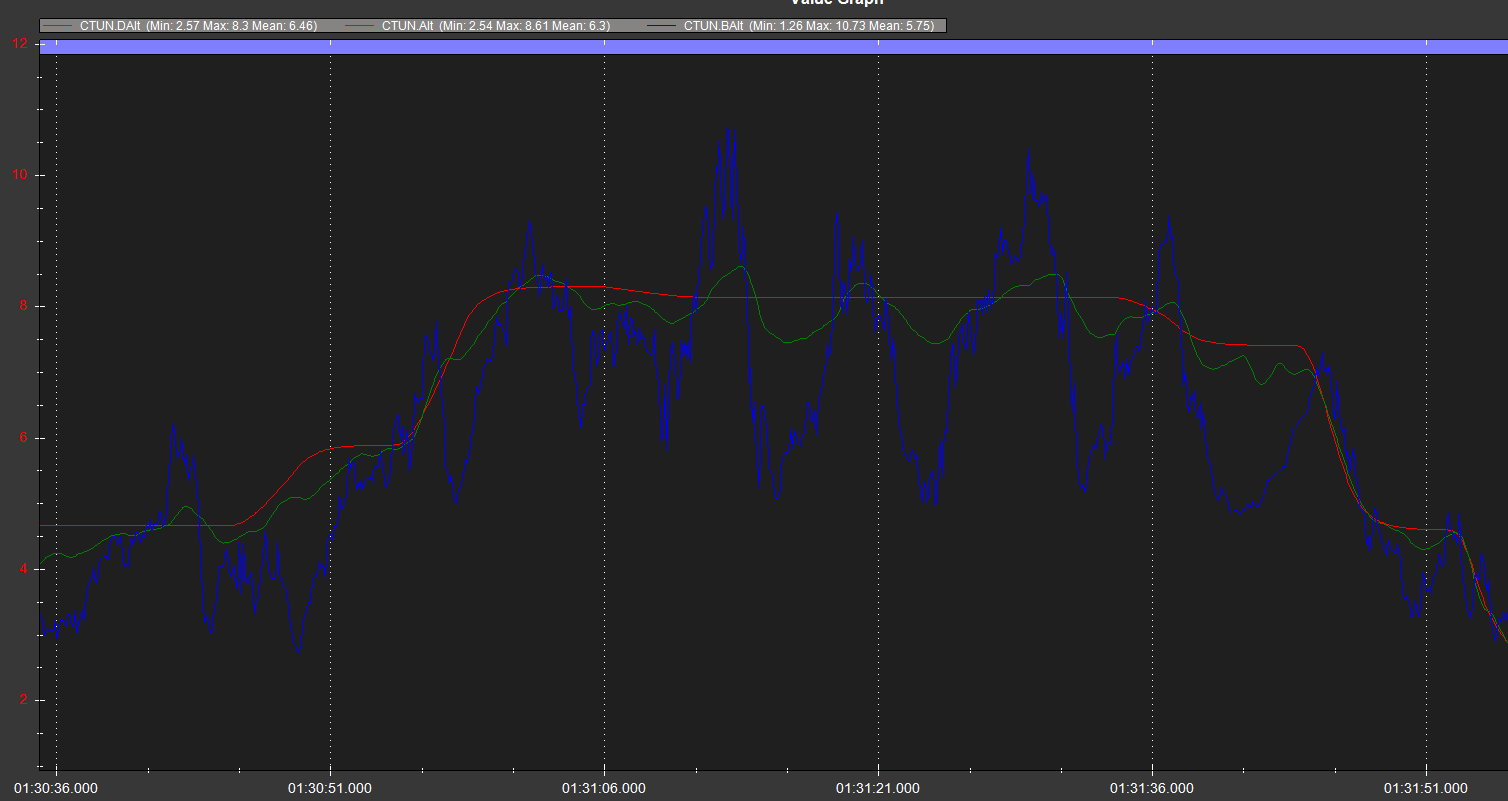
later flight
Attitude control
GPS speed vs RC inputs - during neutral stick, average 0.1 meters per second
GPS
The HDOP was slightly higher than what you previously had, try changing to using Galileo instead of GLONASS
GPS_GNSS_MODE,7
Also on the map of your flight, we can see there is some divergence of GPS position and IMU-calculated position. This happens mostly when you are near stationary, which will produce those near-oscillations you see in Loiter mode, as the copter tries to follow a wandering GPS position.
Compass
There is some improvement to be had in the compass calibration too. Magfit gave these values and it should be a very good calibration since you had a great amount of yaw and activity in your log.
COMPASS_DIA_X,1.02065
COMPASS_DIA_Y,1.00881
COMPASS_DIA_Z,0.97054
COMPASS_MOT_X,0.74812
COMPASS_MOT_Y,1.48353
COMPASS_MOT_Z,3.41530
COMPASS_MOTCT,2
COMPASS_ODI_X,0.00518
COMPASS_ODI_Y,-0.00619
COMPASS_ODI_Z,0.06606
COMPASS_OFS_X,-3.91972
COMPASS_OFS_Y,-23.32287
COMPASS_OFS_Z,10.54336
COMPASS_SCALE,1.01344
Thrust expo
I think the value you have now is correct. I could not see any poor attitude control during high or low throttle that might be caused by the expo value. In the previous log there was some deviation from pitch and roll that might have been because of the old expo value, but it is a very small difference.
A calm day may help to confirm or deny, but either way there’s no big problem and I think you have the correct value now.
In summary, I think attitude is quite good and running autotune would give very “locked-in” PIDs and attitude control on this copter.
Any unsteadiness you are seeing is likely because of the GPS position - if this continues we can relax the position controller slightly. That updated compass calibration may help too.