I’m finally testing out the world of Ardupilot VTOLs, and was wondering if I could get any feedback from expert eyes on my initial maiden flight. I’ve built a small twin tailsitter airframe with some parts bin type components, and was wondering if anyone could see anything glaringly obvious that is wrong/not ideal with the build. I was able to do some “quad” type hovers last week and have attached a log. I’m working through the wiki and intend to follow the setup guides there, but figured I’d check if anyone had any “gotchas” to share before I make an easy slip-up and cause damage. The aircraft is about 315g AUW with a 4S 650 mAh battery (what I flew with). Thanks!
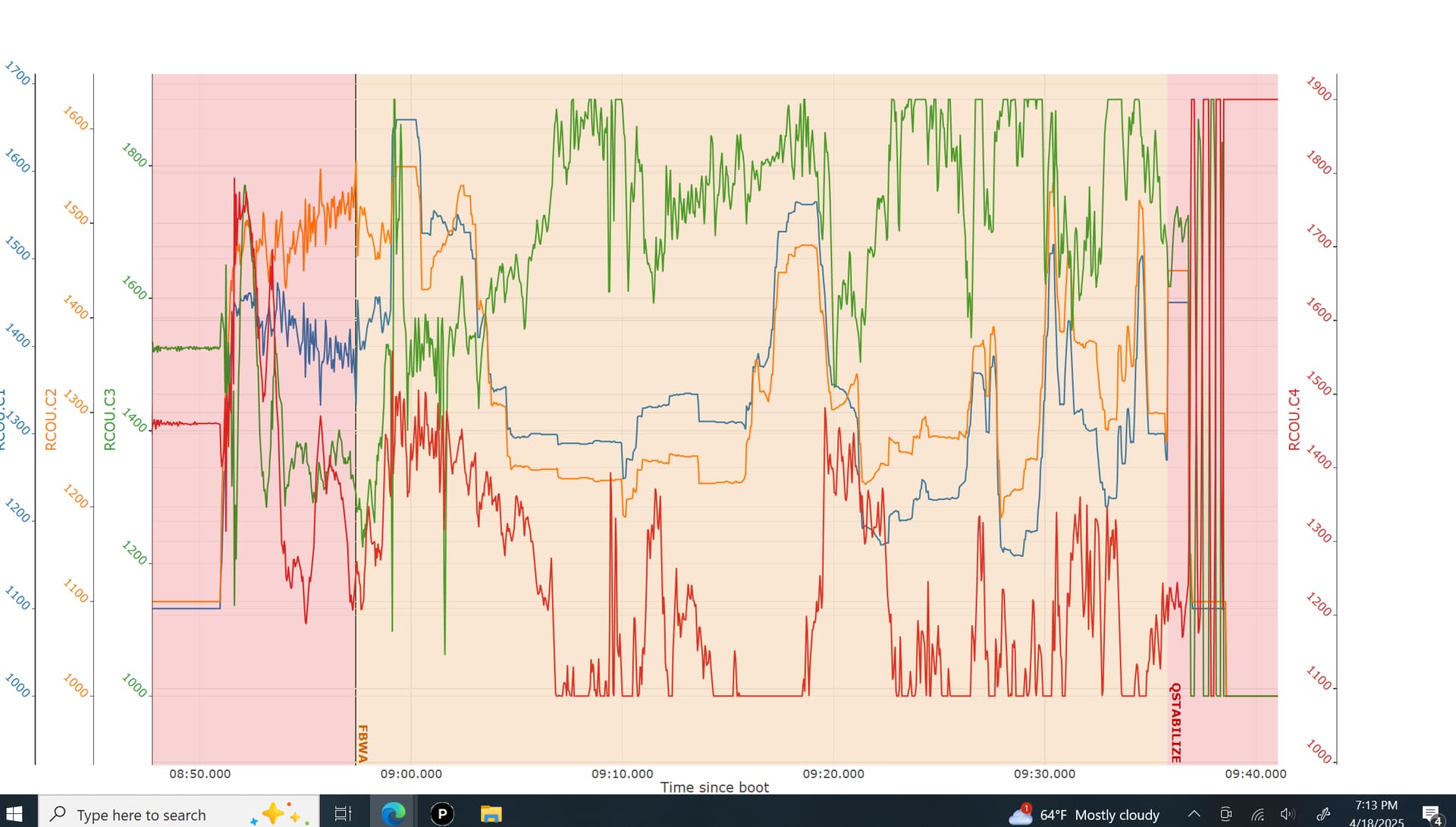
I tried a transition flight today (and still forgot to calibrate the compass). Had some significant oscillations in FBWA and it seems I need at least half throttle to maintain control in QSTABILIZE, but overall, I thought the flight went alright for flying on the defaults. The aircraft’s back in one piece, so that’s always a win. If anyone is willing to take a look at the log, it’s linked below. I didn’t see log dropouts in this flight, which was nice! I’m not sure what would’ve changed to account for that.
Thanks @Allister I’ll do that and try another flight tomorrow. These are just some smaller 1408 2400kv motors from another project/class with 4023 props on them. That would be fun to build a bigger one with the RotorGeeks motors at some point! I still have my eye on Henry’s AeroScout tri-VTOL conversion blog post from a while back that I want to try since we use Aeroscouts in classes here as well.
I tried what you suggested, @Allister, and reduced the PTCH_RATE_SMAX to 125, which did seem to help a bit during the flight, and also appears to show improvment in the log when graphing things like is done on this wiki page - Limit Cycle Detection — Plane documentation . At this point, I’m wondering if I should also work on reducing the fixed wing PIDS to get it more flyable in FBWA in order to start some tuning. I have been looking at this page - Tailsitter VTOL Tuning — Plane documentation which seems more related to tuning a tailsitter while in “quad” mode, but based on the documentation, I should work through the steps on this page - Roll, Pitch and Yaw Controller Tuning — Plane documentation
I feel like I’m jumping in to deep water with this project, but I’m hoping to learn a lot. Any tips/input is greatly appreciated!
I agree, get the VTOL tuning working first. Haven’t tried a tail sitter. I’ve been having fun with the T1. Had it working with the Matek F405-VTOL, but then switched to the CUAV7 Nano and it’s been a battle. I’m probably going to switch back to the Matek.
Back at it with another test today (finally)! I discovered that my center of gravity was way off for the airframe and so corrected that by adding a small “battery pod” on the nose of the wing. I also swapped to 5in*3blade props instead of 4in to help with the CG and I was hoping to also have it help with an issue I’m seeing in VTOL/hovering flight.
I want to work on the VTOL tune now, but it is very difficult to descend from altitude with the aircraft (like after a FW → VTOL transition) as things currently are. From what I observe, the aircraft is very sensitive to low throttle in VTOL mode, and when I lower throttle too much, it begins to tumble through the air, essentially not getting enough air over the control surfaces to keep itself under control, if I’m understanding things right. I think this would also make VTOL tuning difficult.
I was wondering if anyone has any suggestions to make changes to parameters to allow for more servo movement on the elevons if that would help and/or physical changes for the v2 of the airframe to physically cut larger elevon surfaces, etc. Any other suggestions would also be great - thanks!
Today I tried to use QHOVER to help control the throttle a bit and assist with the descent problem I’ve been having, but it didn’t seem to work. I’m in over my head here, but at the suggestion earlier of checking out the eXplora project and my general thoughts here are that I need much larger elevon control surfaces in order to maintain control of the aircraft at the lower throttle settings needed for descent.
I am trying to avoid adding tilts to the motors to avoid that extra complexity. If anyone else has any other ideas, that would be fantastic. I’m essentially trying to see how viable this physical airframe is before I get to tuning, so if there’s a software fix for the behavior I’m observing, that would be great, but my gut feeling is that I need to alter the physical aircraft structure to get better behavior on the “defaults”. Frankly I’m amazed at how well this flies on the defaults - a really great job done by all the developers and those who have tested/flown before me.
yes, a non-vectored tailsitter is quite hard to tune. i have built the Explora and it flies really well. But even Explora has a host of issues during the RTL. during the windy conditions the hovering struggles quite a bit. If you want no control surfaces, I would recommend a quad tailsitter. we just recently built a delivery drone with that. but that also comes with its own problems lol. like motor saturation issues and lower flight times compared to other tailsitters. but its the most stable and least complex
Thanks @Farkhod_Khikmatov I don’t have a requirement of no control surfaces, my main idea was to try to get it as simple (and cheap) as possible to build and basically a flat sheet of foam with a KFM airfoil, 2 motors and 2 servos is about as simple as I could think of. I was also considering @hwurzburg’s box kite "Box Kite" Copter Tailsitter Build instructions but thought I’d try this first as it still requires less components. But if this setup is too difficult to get to behave reasonably well on the defaults (I’ll be building this with students) then I might switch to a quad tailsitter of some type. Does your quad tailsitter have an “X” configuration or a “+” for the motors?
For my first build, i made an open-source 3d printed CYGNET aircraft. This was made by Ricky. If you guys do have access to a 3d printer I would strongly recommend you build that as a first “h” or “x” configuration quad-tail sitter. Free 3D file Cygnet VTOL ・Model to download and 3D print・Cults
Thanks @Farkhod_Khikmatov . The Cygnet also looks pretty cool. I’d like to stick with carbon rod reinforced foam board for this build and/or the box kite, it’s just more simple to build/work with. I do have access to a 3D printer, but I am not at a high skill level with the slicer, etc. so I’m not sure I would have the time right now to fiddle with that for a 3D printed model.
Well, I went a built a v2 of the aircraft with larger elevons to see if that would help with control in a hover. Granted, it was a bit breezy on the day I was testing, but I still had a really hard time trying to get it to hover consistently. Was wondering if anyone had any inputs on this other than the practical fact that tailsitters are hard to fly in breeze/wing and or that my tailsitter happens to be quite light weight which really makes it twitchy. I’ve attached a log if anyone has any insight. Thanks!