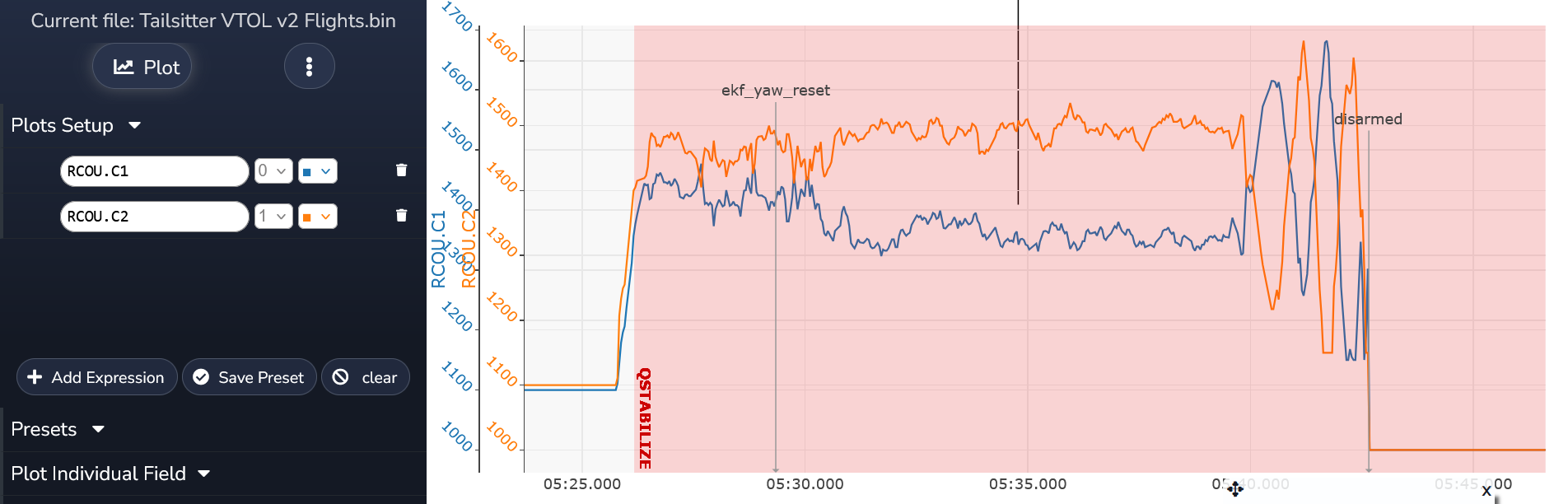
@Farkhod_Khikmatov Thanks for taking a look! I’m not sure I understand what you’re referring to - when I look at the most recent log and graph RCOUT.C1 and C2, my two motors, they seem to average around 50% throttle (or less) in hover, at least until I lost control of the aircraft. Of course lower would be better, but I would think 50% is okay for hovering with plenty of headroom left over for maneuvers. Am I missing something? Thanks again for the help.
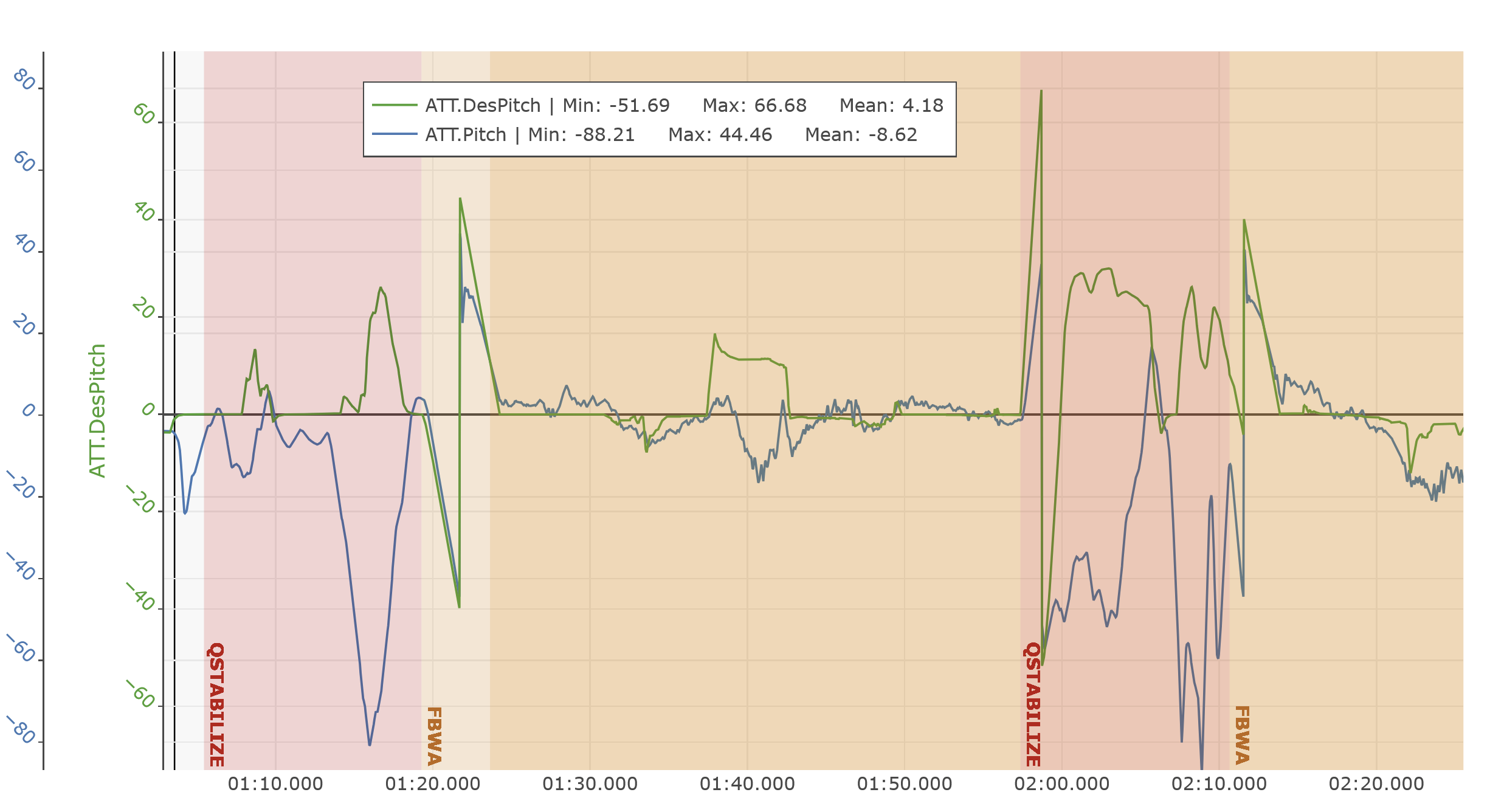
Well, I’m still at it, trying to figure this thing out. I had another couple flights today, and tried to get an entire flight on the small dataflash chip this FC has. After looking at the log to the best of my ability, I think the conclusion I’m coming to is that when oriented vertically, the tailsitter is unbalanced with the battery on the bottom side giving too much weight to that side and causing the flight controller to constantly be fighting to keep the nose up, especially when any breeze comes along. Since this is a very small aircraft to begin with, the battery is already quite small, but I have 550 and 450mah 4S packs I could try instead of this 650mAh. Does anyone else notice anything in the log? I’m attributing the crash at the end to this imbalance as well, though it was quite strange to see the vehicle spiral essentially out of control. I tried to save it with FBWA, but that didn’t help, and unless I had great reflexes, I don’t know if Manual flight mode would’ve been able to save it either.
Any insights on the log you can share would be great! I was looking at the QSTABILIZE sections of the log which led me to believe the vehicle is imbalanced.
V2 new eCalc COG \u0026 4S_650mah.bin