Again i do recommend building a smaller x8 build.
Do you think it could be due to esc type?
Note for more than 8 arms cannot use aux port
You could have a scenario that it would be better start fresh. then use normal esc settings.
My drone flew like a dream yesterday! I want to thank everyone who took the time to help me on this. This forum is awesome! I fixed it by starting all over and following the documentation as one should. It is still a little touchy but I was able to take off in stabilize mode and hover as long as I wanted. It even landed using land mode and it was very smooth. I had to adjust some trim on pitch and roll but not much.
At the end of the flight I did get,”bad battery” and I was wondering if this was the battery monitor. Someone mentioned this once before as it seems I have a “knock-off” 3DR. Here is the flight log if anyone wants to look at it and make any suggestions on how to make it smoother.
I did have a question about this message;
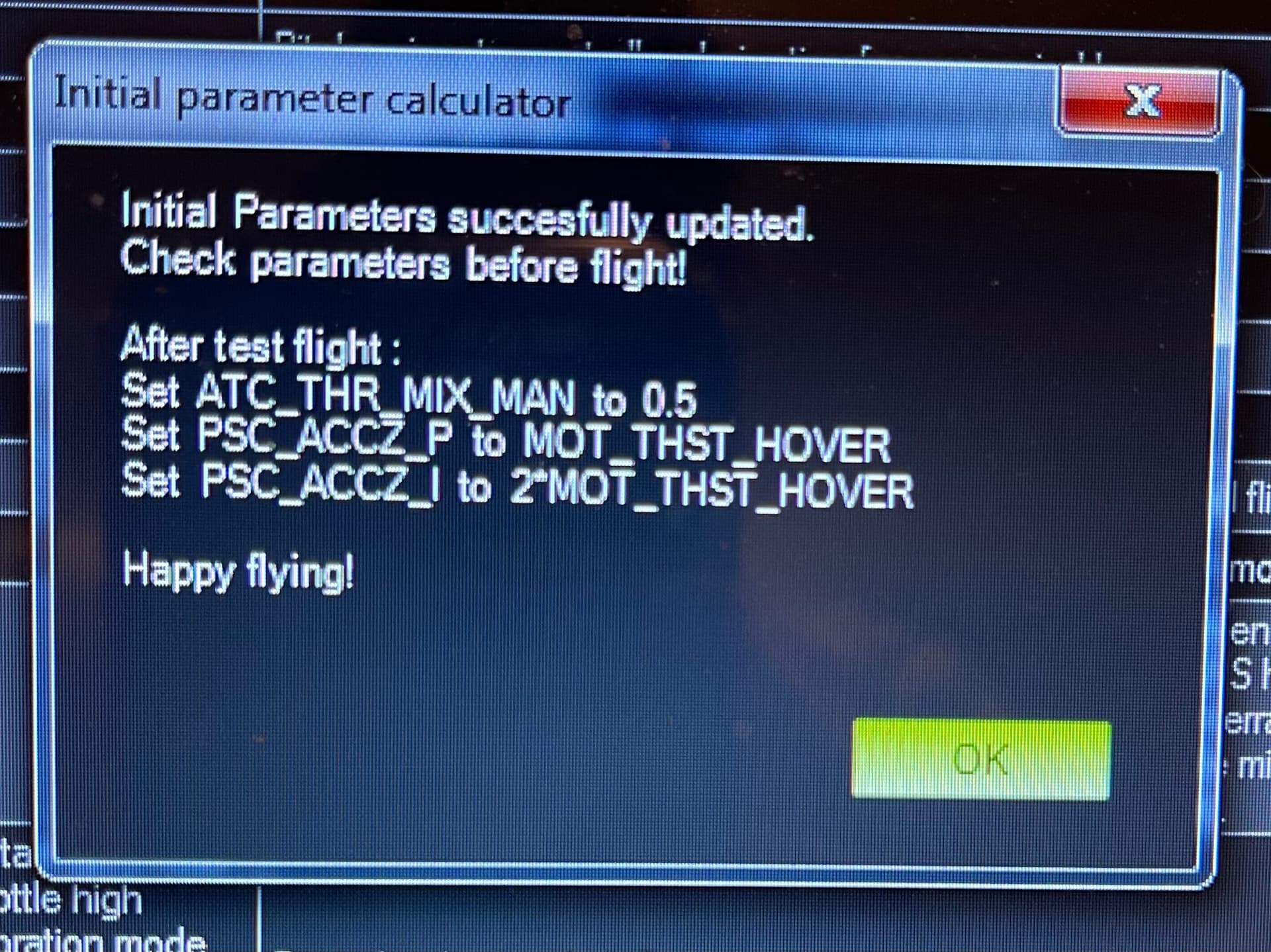
I was able to set ATC_THR_MIX_MAN to .5 but PSC_ACCZ_P to MOT_THST_HOVER seems to be a problem. MOT_THST_HOVER is .2 right now. The minimum for PSC_ACCZ_P says it is .5.
Ignore that and set it however you want.
Like to learn from you, how did you launch this initial parameters checker?
Alt>A tuning plug-in.
Like the tuning instructions page says, MOT_THST_HOVER will only get updated if you actualy fly in ALT_HOLD for more that 30 seconds. Did you do that?
I was just re-reading that. When I tried to go into althold it flipped over. I flew it in stabilize only. I will set those back and get the lidar working again. Then attempt althold again. Thank you.
That tuning instructions page also tells you to be very careful the first time you switch to ALT_HOLD mode. You need to be prepared to switch back to stabilize if something goes wrong
Our experience with the small drone suggested to us that tuning result is better achieved through primary components, that is IMU, baro, GPS… Optical flow, range finder, etc should come in after tune.
This has been the way we tune after one bad experience on a small drone.
I’m going to upgrade the flight controller from my pixhawk 2.4.8. I’m looking at a cube because I won’t have to change much. Someone mentioned something from CUAV and I was looking to compare the V5+ to the cube (orange or blue). Does anyone have experience with these FCs?
Some experience setting up and configuring a Nora on a large X8. Very nice Flight Controller. Cube Orange would serve well also. Cube Blue if Made in USA is important to you.
1 Like
Thank you! You guys are so helpful. Just for the future, when I have an off topic question, do I need to start a new thread?
Yes, please start a new thread for a new issue.