A typical Power Module should plug right in to a Pixhawk 2.4.8 with the cable it came with.
But, you should consider a better quality Flight Controller for a large craft like that.
A typical Power Module should plug right in to a Pixhawk 2.4.8 with the cable it came with.
But, you should consider a better quality Flight Controller for a large craft like that.
Like a cube or are you talking about a different kind altogether?
Cube would be fine or an offering from CUAV or Mro. If you want something less expensive the Matek Wing boards would be good like the H743-Wing. Just be aware that if you want to run Dshot you need a FC with 8 Dshot capable outputs. What you have does not. On FC’s with an IOMCU they do not support Dshot on those outputs.
What does the craft do at 1/4 throttle? (don’t take off!). Does it look like it is “getting light on the skids”? I.e. Can you see it reacting to the lift from the motors? If so try putting some right stick on the controller, does it tilt to the right, same for forward stick, can you see it tilt forward?
If the throttle notches equal 100 percent then at around 20 percent (barely off the bottom) it goes to the moon. In stabilize mode that is. It is severely overpowered but I need it to be in order to carry the load intended. That is why stabilize mode won’t work for me. Unless I use a dial to “tame it.”
At around 10 percent it seems light and responds to all controls as it should, pitch roll, yaw
You really want to make this X8 controllable before you can tune it properly
That’s good, but as it’s so over powered it’s probably over tuned too. Do you have smaller props to use while you get it tuned? Otherwise turn down all the P, I & D parameters by 50%.
The props point up like the top propellers do, you do not flip them but you could need to ream the hole out a little.
I do not have smaller props for it but I will try adding a payload and turning down the PIDs.
When you say,”Dshot1200” and use PWM do you mean set the ESCs to “normal?”
Yes. You cannot get 8 Dshot outputs from that Flight Controller anyway.
Awesome! Thank you. It’s rebuilt and reprogrammed as you all told me. Ready to fly but rain for the next 3 days. I will let you guys know. I appreciate all of the help.
Well, I tried to fly it but it wouldn’t even take off this time. It just flipped over onto the front props every time I tried. I even gave it full reward pitch and still tipped onto it’s front. I’m not good at looking at these logs. The only thing I changed that it had set was the throttle hover. For some reason it had it set at .69 and something recommended.25. So I set it at .25. Here is the log;
Any help would be appreciated.
we built an OctoX drone measured 1.88m, H = 0.9m, 2388 propeller, Ardupilot 4.0.7 fw.
We set the initial parameters using this spreadsheet shared.
did the ESC calibration and motor test to set the MOT_SPIN_MIN and MOT_SPIN_ARM
We set the MOT_THST_EXPO using this spreadsheet.
Set the INS and GPS Position. Balance the drone to get the CG thrust correctly.
Then did this first step and is a success.
Updated some value.
MOT_THST_HOVER should be <0.25 or below the expected hover thrust percentage (low is safe)
Started the Yaw autotune, did not complete due to not enough battery power.
Just to share our experiences, so far no crashes yet. Could be we have a very experienced pilot. maybe you want to have some limit towards pilot speed for now, example,
PILOT_ACCEL_Z,
PILOT_SPEED_DN,
PILOT_SPEED_UP,
WPNAV_SPEED,
WPNAV_SPEED_DN
WPNAV_SPEED_UP
Check motor order again and AHRS orientation.
Here is the right motor assignment using motor test.
reset you config file and start over .Install the esc’s pins like this.
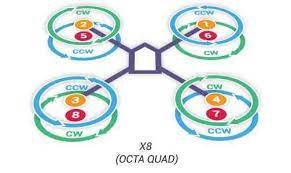
For now do not use Dshot just set it up with normal and do a ESC calibration all the motor will spin up. It’s not a bad idea to make a smaller x8 to acclimate your understanding of X8 then move to a larger frame. Once the small frame is working go back to the large format.
That is how they are set and I do a motor test every time I plug it in. I will re-do the whole config file again but I’m sure there’s something simple I’m missing.
Don’t worry about tuning the x should fly right out of the box. fly it first then let me know what it does.
