I am building an X8 that I need to pick up, carry and set down 50 lbs. I have been stuck in the tuning phase for 2 months now because I can’t keep it in the air long enough to auto tune or get any kind of idea how it flies. When it is unladen, if I try stabilize mode, it either goes to the moon or crashes. I tried putting a curve, expo and several other things on the throttle then abandoned stabilize mode so I didn’t have to worry about thrust.
I thought an auto mode would be better so I could just tell it to either, climb, descend or hold position. This was a disaster too. It went crazy, started bouncing in alt hold, and came back towards us. I stepped between it and the kids (who are no longer allowed around it) and ended up with six stitches in the leg.
I really think the poshold, loiter or althold are my answers because it will behave differently when it has the weight but I can’t get it to hover. I added a laser range finder hoping this would help but it still bounces and ultimately crashes. The latest crash broke some props, an arm and damaged the frame.
I am new and this is my first build. I just learned how to get the logs this morning. I am so scared to fix and fly this thing again. From what I can see, the motors might be off balance, there is interference and some GPS error. Can someone please help me? I’ve tried to do this on my own so I could learn but these crashes are dangerous and expensive.
About the vehicle;
Flight controller = pixhawk 2.4.8
Ardupilot 4.0.7
Escs = Tmotor F55A pro 2, 4-in-1 (times 2)
Motors = KDE 4215 XF 465 kv motors (times 8)
Props = 1855 carbon fiber (times 8)
Frame = custom made 8 inch by 3 inch carbon fiber octagon
Batteries = 5200 mAh 4S lipo times 2
Lidar = TF Luna 8 m range
It is, roughly, 4 feet from prop to prop and stands about 2 feet off of the ground.
Here is the log;
Size (kb) 2955.873046875
No of lines 38397
Duration 0:01:57
Vehicletype ArduCopter
Firmware Version V4.0.7
Firmware Hash 0bb18a15
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (589.27%)
Max mag field length (2623.29) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: CRASH GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = NA -
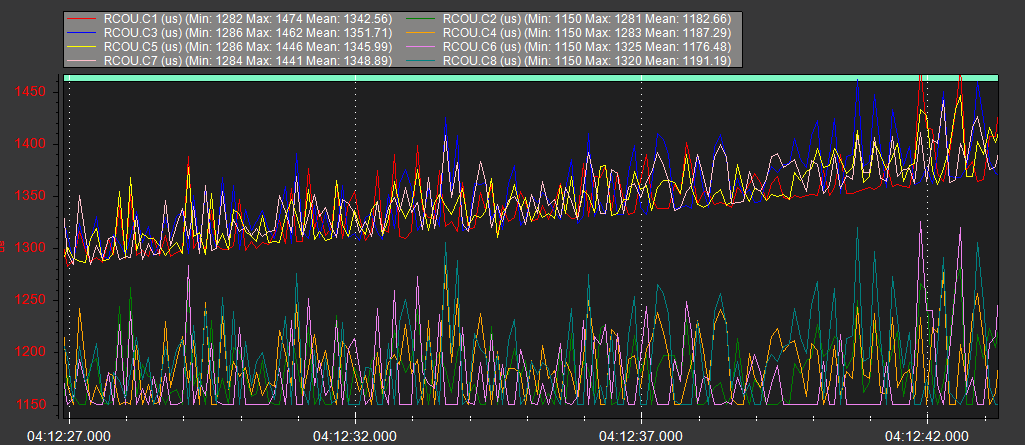
Test: Motor Balance = WARN - Motor channel averages = [1199, 1131, 1209, 1139, 1201, 1128, 1208, 1140]
Average motor output = 1169
Difference between min and max motor averages = 81
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
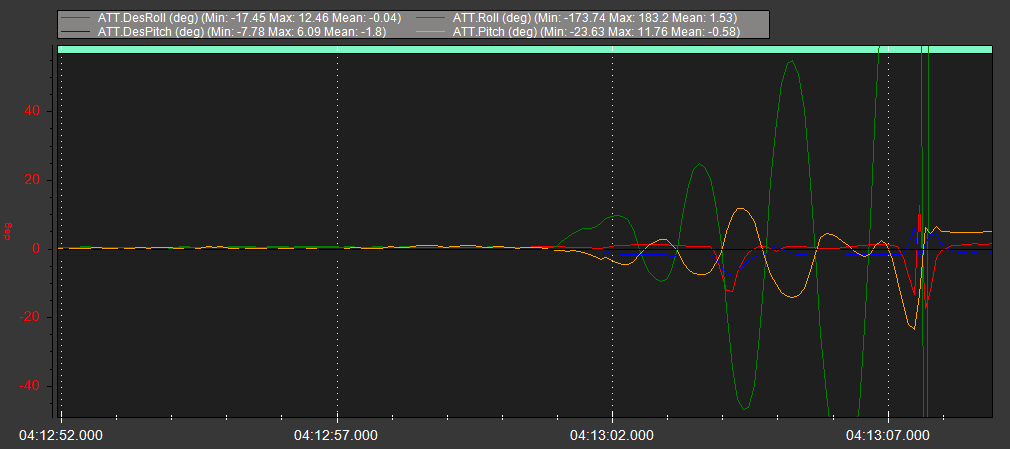
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
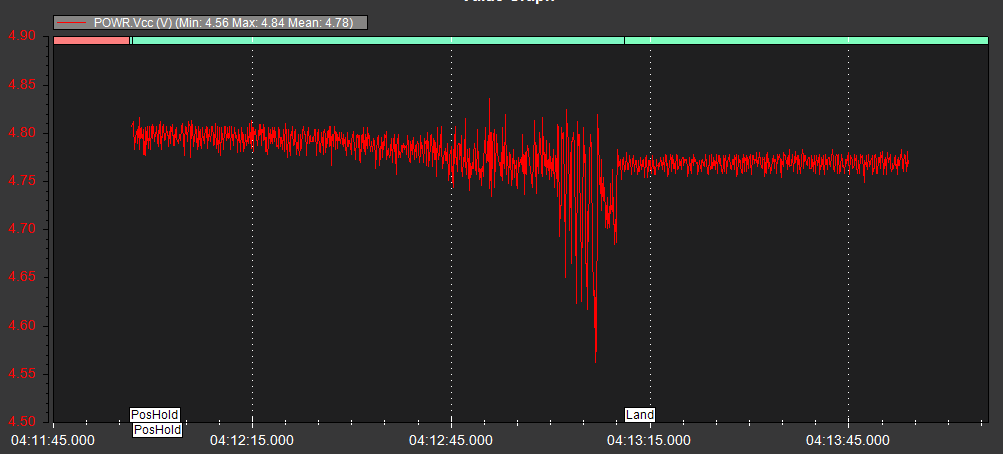
Test: VCC = UNKNOWN - No CURR log data
Here’s a link to the video of this incident;
Any help would be appreciated. I should have started with something lighter and smaller but I am committed now and have a lot invested in it. Thank you in advance.
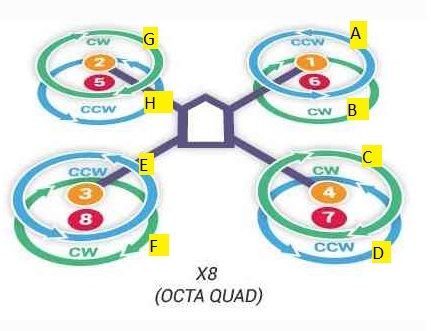 . All motors spin how this picture shows. Is this pic wrong?
. All motors spin how this picture shows. Is this pic wrong?