that’s looking better, try and drop D down to 0.03 we want the motor outputs to be a a little smoother.
Here is the Log for Pitch: D=0.03:
https://drive.google.com/file/d/142rJntuyXVd70Jcz8Z9uKxu836J6b8y3/view?usp=sharing
is it picking the back end up without you giving it pitch inputs? I would say that its tuned enough to give it a test hover, then we can look at what else it needs.
Yes, it is better. But it hard to say exactly. I am doing this alone and I am managing the vehicle and the transmitter. It is bit of a handful. My hand is steadying the vehicle a little in case the vehicle pitches wildly like it sometimes does in the beginning. As the vehicle becomes steady I start to reduce my left h. My left hand holds the Tx and my fingers controls the elev stick. My mouth shuts the throttle off at the end.
What about the change in throttle causing pitch changes?
the increased I gain should increase the multirotors response to large pitch imbalances.
ok. Cant we test that now before a hover test?
you can try some pitch commands on your test stand and we can see what they look like but I dont know how accurate it will be.
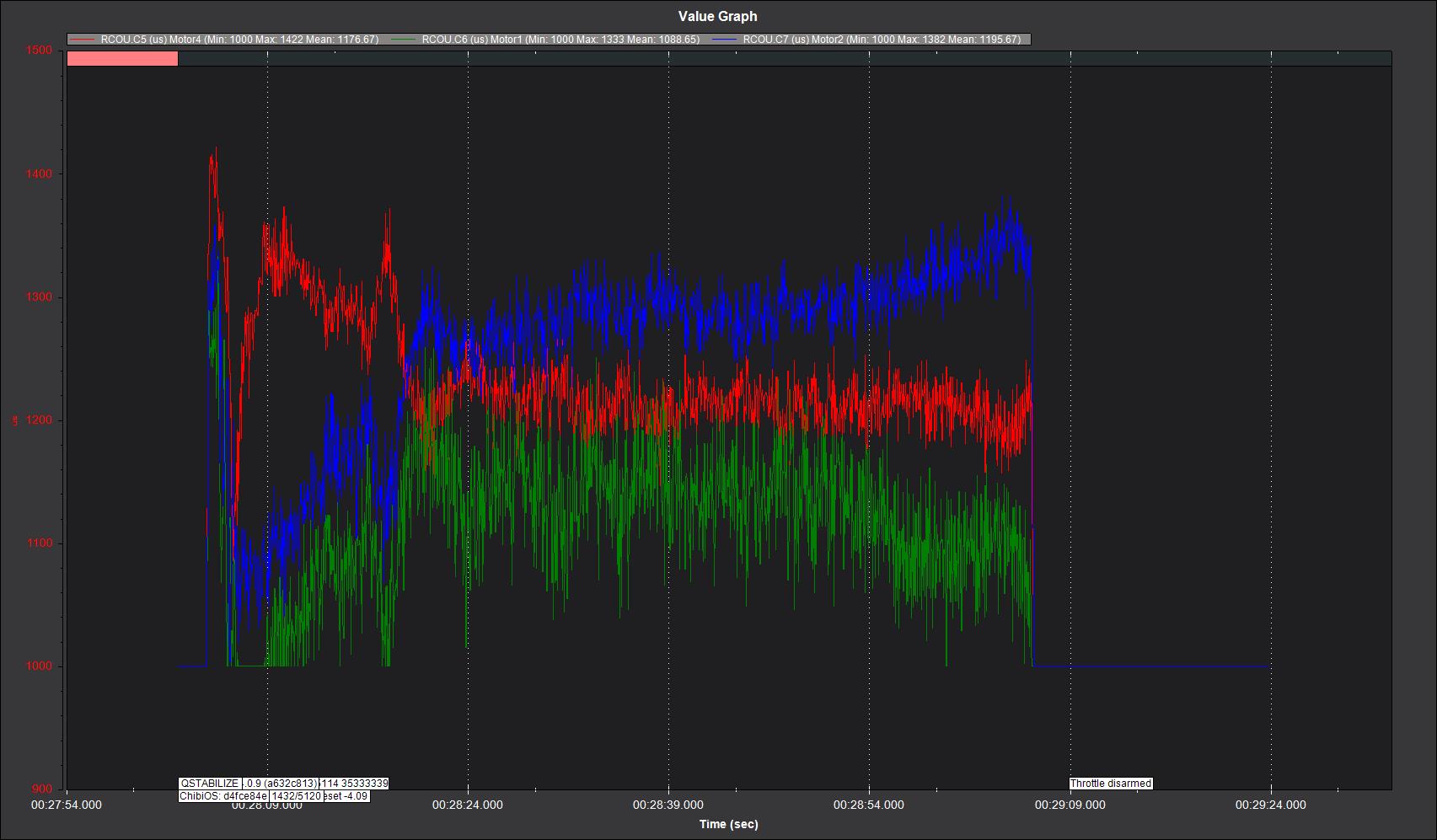
I ran test where I varied the throttle as it was balancing in pitch. The effect of thrust changes on pitch is still there (±1.5 deg with up and down changes in thrust) but it is a lot smaller. Here is log file of this test:
https://drive.google.com/file/d/1TUYvsupax2TgzY-rkG8tn6w5EnTnppqm/view?usp=sharing
try the pitch I up at 1.5 and see if it improves things.
Reduce the pitch D down to 0.2 there is still some high frequency movement on the motor outputs.
Here is the log for I=1.5. It is very difficult to do this test because the vehicle tilts from one extreme to the other as I change throttle, before I get it under control. But I would it helped a lot:
https://drive.google.com/file/d/10KHqtn009JLdUi_b65lA28QwHY5QR2Zz/view?usp=sharing
D was 0.03 before. Do really mean make D=0.2. or D=0.02?
sorry i mean set D to 0.02.
Here is the log for D=0.02. The throttle seemed to have a lot less effect on pitch:
https://drive.google.com/file/d/1Ffy8wmH-aEkThhruBOvRcxS9g_fwd_vn/view?usp=sharing
1 Like
These are the current PID values:
Pitch: P=0.3, I=1.5, D=0.02
Roll: P=1.6, I= 0.2, D=0.01
YAW: P=0.18, I=0.018, D=0.0
What should we do for Roll and YAW?
before you do that, change pitch D down to 0.005 i want to see if it stops the high frequency motor output oscillations.
Here is the log for Pitch: D= 0.005:
https://drive.google.com/file/d/1hq57CyuUv6fuydDG6ITYrd0rLMkCuRTw/view?usp=sharing
ok set your roll to Roll: P=0.4, I= 1.0, D=0.01 and i think you should be good for a hover test. yaw is not to imprortant just now.
Ok. It will take me a few days to fix the front wheels/shocks that broke in the last flight. Perhaps I can also test your new proposed Roll values using my Roll pivot bench test setup. I will let you know my results.
Thank you for all your help and patience. I really appreciate it!
try pitch P at 0.4 and 0.5 if you get a chance, the 0.3 was just a guess and is probably a little low.