ground effect is fine, you can test in ground effect, all we want to see is the pitch and roll oscillations are gone that can be done with it inches off the floor. Increase the I gains to 0.3 and it should give the autopilot more authority to keep it level and help bring down the pitching movent when you move the throttle. my theory is we just treat it like an aircraft with a weight imbalance, that is normally helped with I gain.
No, the ground effect causes pitch instabilities. The thrust builds up under the vehicle and vents out under the side panels casing the vehicle to oscillate.
no your PIDs were causing the oscillations. it was nothing to do with ground effect.
I would like to continue testing using the bench test because it is safer. Once it is working well on the bench than we can try hovering it and tuning the parameters to improve the performance. But right now the change in pitch with changes in throttle is a huge problem that needs to be fixed before I dare try the vehicle in hover. These crashes are very hard on the vehicle and should be kept at minimum. It is made of just 2 in styrofoam with one layer of 2oz fiberglassed resin and the vehicle weighs 200 lbs.
I will now try changing pitch to I=0.3 and report the bench test pitch results.
By the way, I have a 1/6 scale version of the vehicle and it flies quite well. But it uses the same motors for both the front and back motors. But the back motor uses a more agressive 3 blade prop and the front uses less agressive 2 blade props of the same diameter.
Using a similar bench test I could see it also has ~ 1 deg pitch setpoint drift. So ~deg setpoint drift is normal. It is just more observable in the full scale vehicle because arc length increases with radius. Here is video the 1/6 scale flying in VTOL:
https://drive.google.com/file/d/1q6iPsVydYqC_2YI6IAgRftKsNPcW9C_0/view?usp=drivesdk
Here is link to see detailed pictures of the 1/6 scale model:
https://drive.google.com/drive/folders/1j68z1Qh_AZvRhpnr3g798ylBluGNtuC0
William
You bench is not going to give you accurate results. as the throttle levels are a fraction of what they are in flight. all you need to do is:
Bring the throttle up very slowly until it goes into ground effect then give it very small pitch and roll corrections to keep it in place, keep it there for a few seconds to see if it starts oscillating then bring it back down, you dont have to take it more than a couple of inches off the ground. if it starts shaking or pitching then just slowly lower the throttle and land it.
test stands are good for checking things like are the controls and motors moving the correct way, but you can’t tune a machine on one.
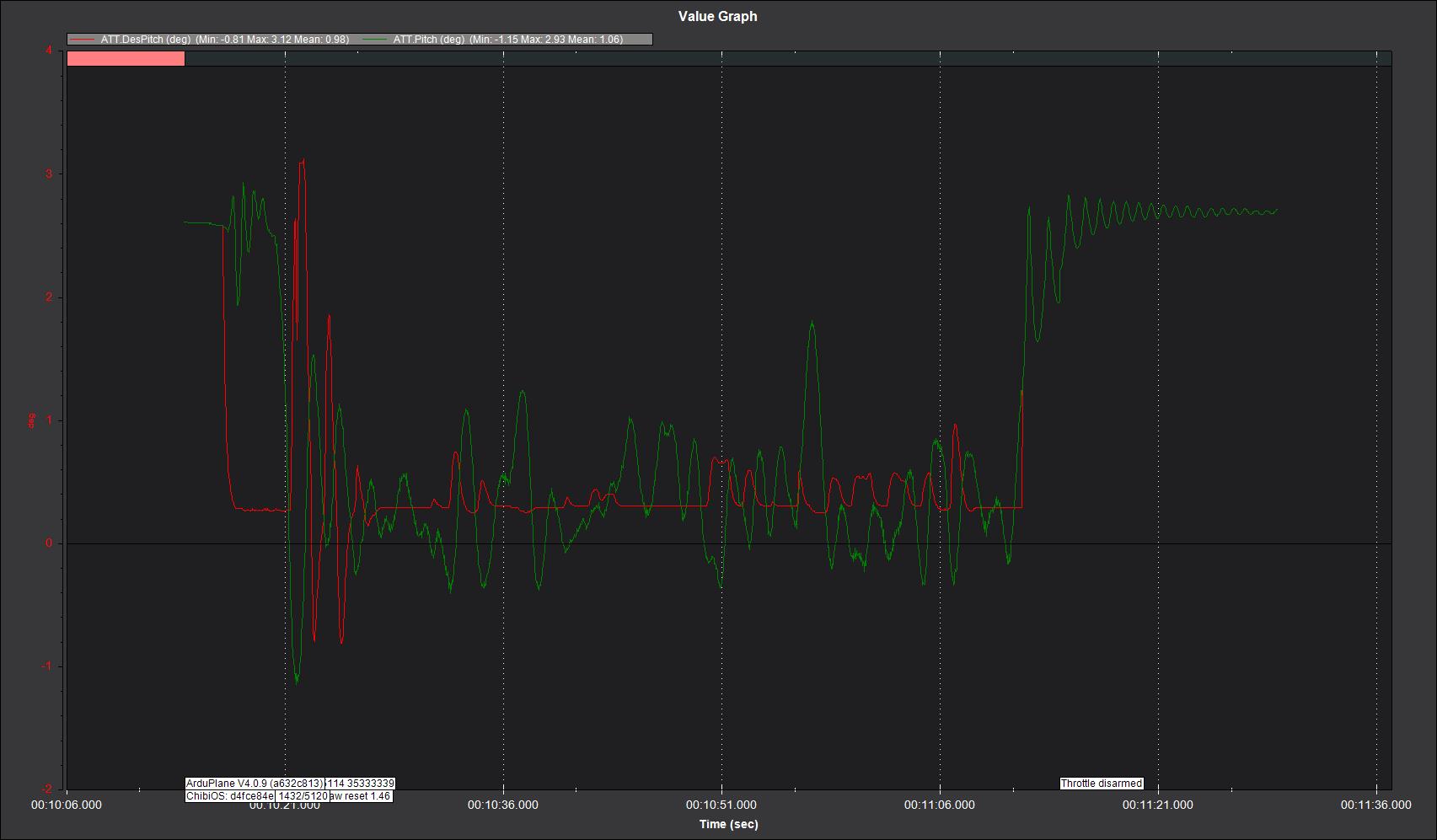
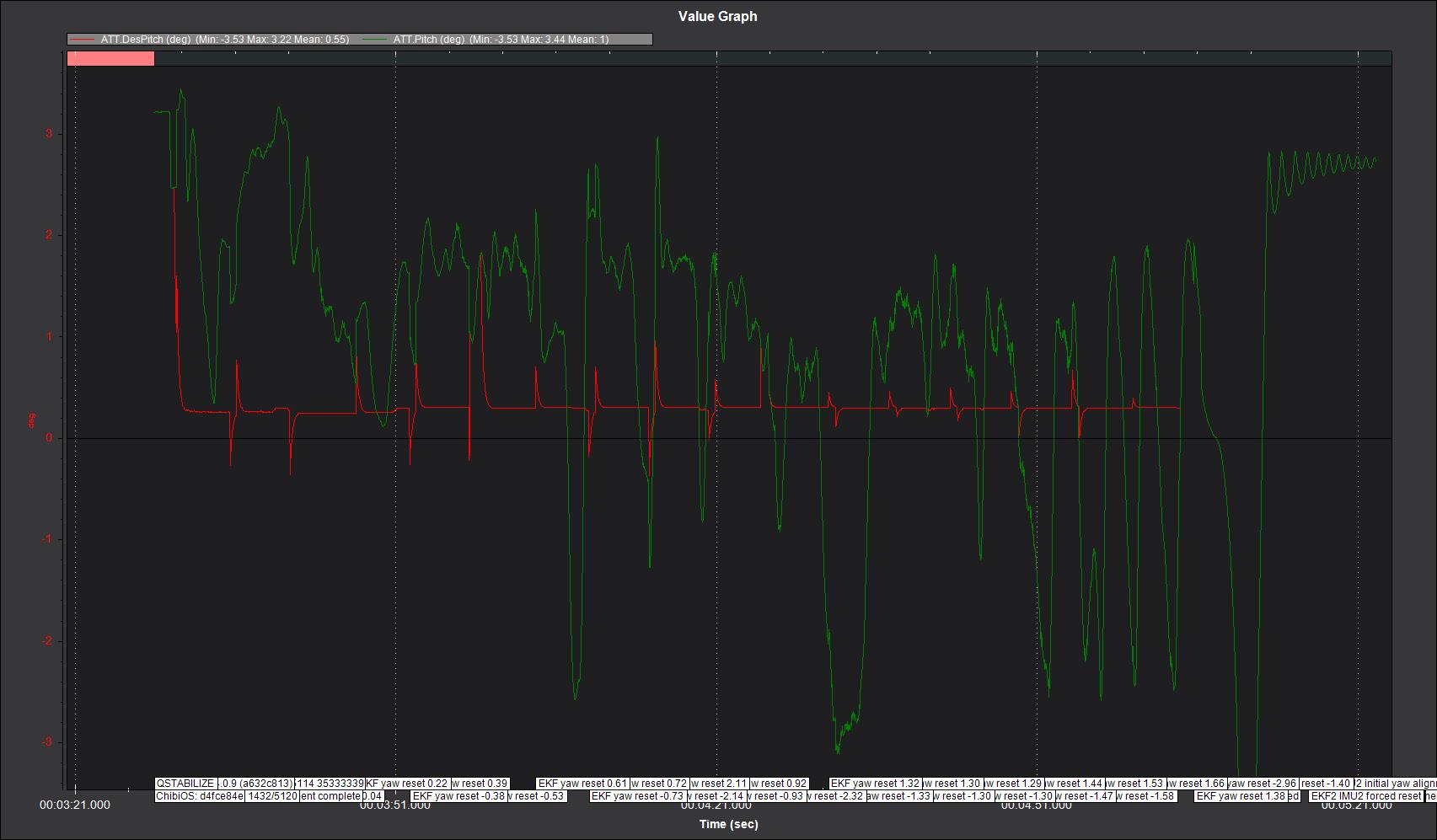
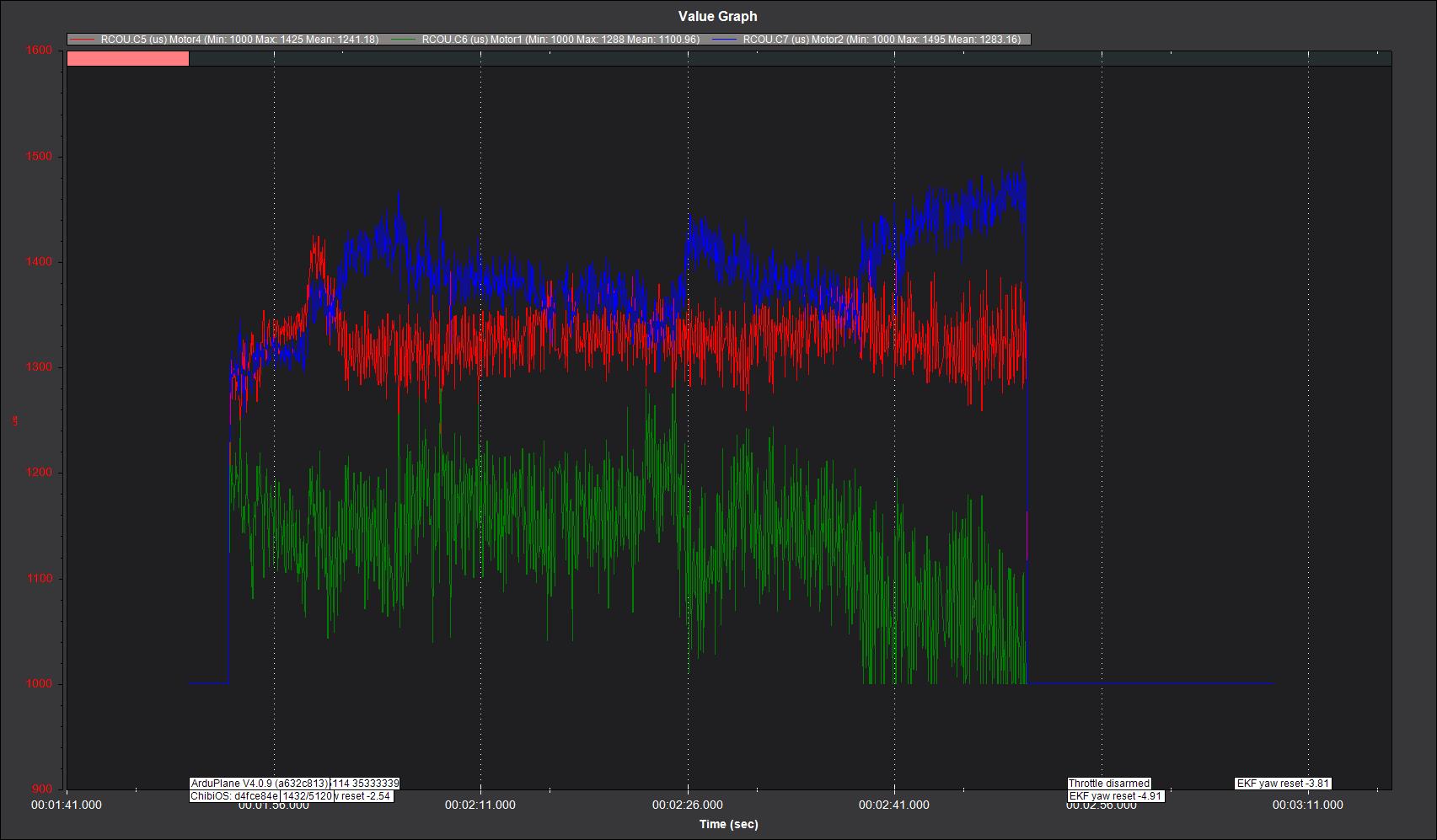
Below are log files for bench pitch tests for 3 configurations. During the test the vehicle was pivoted at its Pitch CG and leveled using the elevator stick control (D=0.01 for all 3 tests):
-
Origional PID params used in last test flight (Pitch P=1.0. I=0.02):
https://drive.google.com/file/d/1-I7sTqW3d-wVf23PXHgvYwBRNbIbSSMp/view?usp=sharing -
PID values origionally recommended by Geofrancis (Pitch P=0.3, I = 0.15):
https://drive.google.com/file/d/1Nf3wzmZ-ftFuNGhOIdl1Auu2NdQuH094/view?usp=sharing -
New suggestion by Ggeo francis (Pitch P=0.3, I = 0.15):
https://drive.google.com/file/d/16A7t3LWvTB-vFJ80Ee9IdHLzFgx-d8qi/view?usp=sharing
William
Look at the video of the last test flight. The vehicle is really unstable due to ground effect until it gets about a yard up. But at that height, as can be seen in the video, the crashes are damage the aircraft. It will take me half a week to repair the damage from the last crash. Link to see video of last test flight:
https://drive.google.com/file/d/1XF2af9BRVl0FTPep8M5Kbumt_HAGXxAh/view?usp=sharing
its still overcorrecting, add pitch D =0.05
if you compare to the first log with your original pids its a vast improvement.
As i have said its not ground effect that’s causing it to be unstable I use ground effect to train student pilots how to fly multirotors since they can’t break it when it’s a few inches off the floor, once they can keep it in once place I let them get some altitude. I have never seen a machine that couldn’t do ground effect.
But you have probably never seen a vehicle with side panels that are about 6 in off the ground. We could not get the vehicle to lift the back end in the beginning. But as soon as we lifted the vehicles back end with out hands, it lifted it with a tremendous force. later we improved on the back motor thrust and over came this problem. But it shows that as the back end lifts, the back end generates more lift, and visa versa as the back end get closer to the ground, less lift is produced in the back end. we think that the calculations showed that it could be a partial vacuum that is forming under the side panels due to the high speed thrust venting under the side panels. Before we increased the thrust from the back motor, we added a skirt under the vehicle to block the thrust from going under the side panels. This enabled the vehicle to lift off and hover for the first time using the same PID values we used in our last test flight:
https://drive.google.com/file/d/1csnLLtug1sz9msU4BM_flKp9pHXlquIa/view?usp=sharing
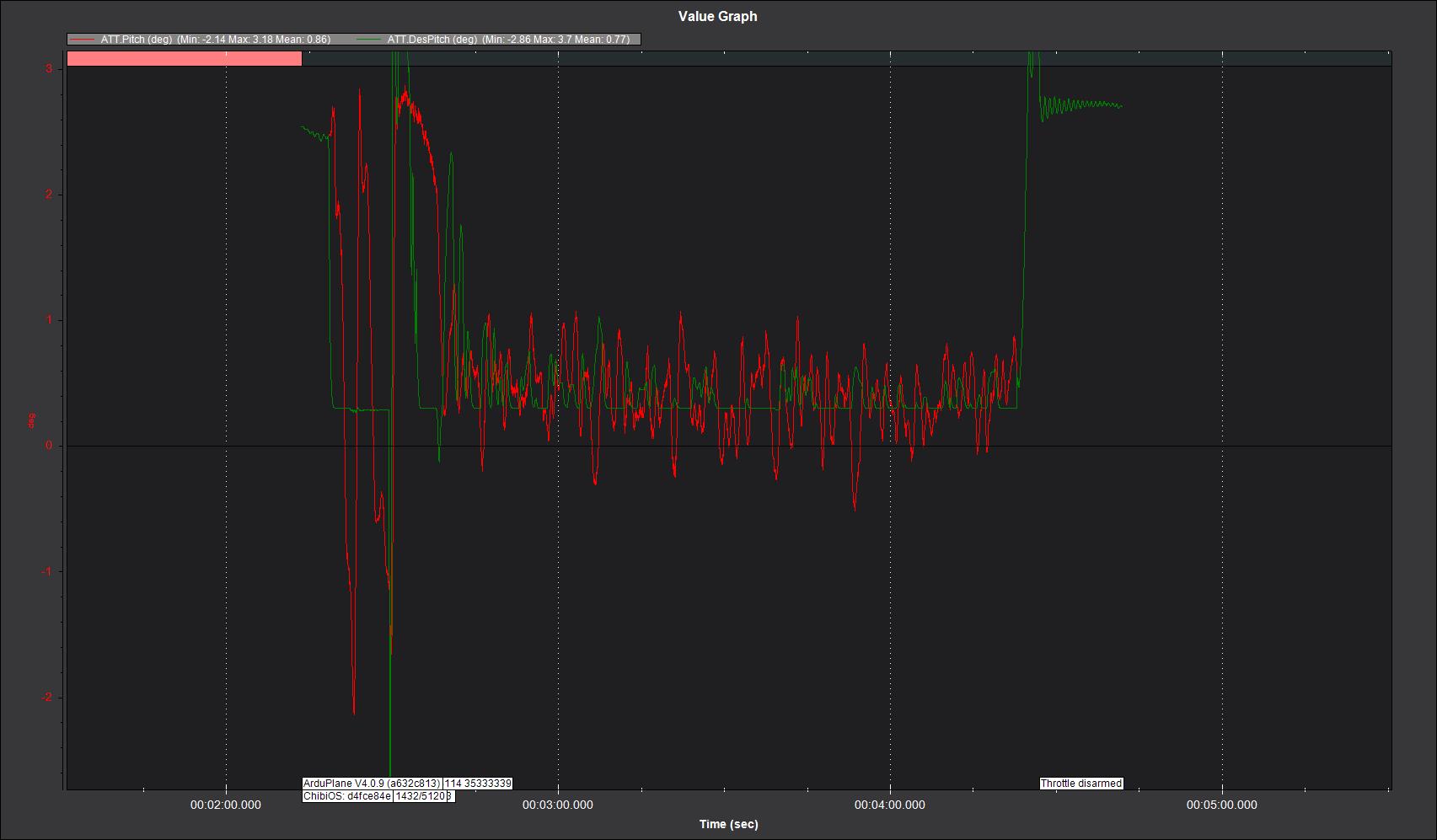
Here is the log for the test you requested D= 0.05:
https://drive.google.com/file/d/11yCCVbd_bdHzPeAUOxZl8aQPo9uUlMqb/view?usp=sharing
William
that is starting to look better now, its at less than a degree and the throttles aren’t moving wildly.
try bringing the pitch P down to 0.2 and bring the pitch I up to 0.5.

you might have to turn them up again once its off the test stand as it will exaggerate the pitch since all the thrust is going into pitching rather than pitching and lifting since you have essentially turned it into a seesaw.
Here is the log for Pitch P=0.2 and I=0.5:
https://drive.google.com/file/d/1mQt4SW0Z7KUlqOwiPv90ECcdcjYxMVhj/view?usp=sharing
it was better when it was at pitch 0.3, try it with the pitch p back at 0.3. and leave the I at 0.5.
Here is the Log for Pitch P=0.3, I = 0.5:
https://drive.google.com/file/d/1vhwUVdWUXkpzpaFJ5hUFMhjAQJSfWlzR/view?usp=sharing
its tracking better, try increasing the pitch D to 0.07 we want that green line to be smoother. give it a little pitch input from the controller and see how it reacts.

Here is the log with Pitch: D=0.07
I had trouble stabalizing it at first, so look toward the end for the stability:
https://drive.google.com/file/d/11U6lep5MWiVjxBpdAq4ruABTlqgKWof0/view?usp=sharing
increase the pitch I gain to 1.0, it should be enough to lift the back end on its own.
reduce the pitch D gain to 0.04 it might be too high as we are still getting some high frequency oscillations.
Here is a log for only Pitch I=1.0
https://drive.google.com/file/d/1yFwD0tH_6QjZvT7Bru2jlgfv2ytmddFj/view?usp=sharing
now I will add D=0.04
Here is the Log with I=1.0 and D=0.04:
https://drive.google.com/file/d/1XPbSKYzov8drgpEzG62w-Crnterp91-r/view?usp=sharing