Hi. I have tuned the vehicle the best I can using IPD tuning and ground effect testing. Here is the resulting final PID Values:
Pitch: P=0.3, I=2.0, D=0.005
Roll: P=0.4, I=1.2, D=0.01
Yaw: P=0.18, I=0.5, D=0.0
The Pitch, Roll, and Yaw seemed to track the desired stick commands. So I tested the vehicle yesterday outside and tried flying it higher out of ground effect. The overall behavior was about the same as the flight with PID tuning. Here is video and log of the test:
Video:
Log:
Here is the Video and Log of the previous outdoor test using PID tuning:
Video:
Log:
These were the PID values used:
Pitch: P=1.0, I=0.02, D=0.01
Roll: P=1.6, I=0.2, D=0.01
Yaw: P=0.18, I=0.018, D=0.0
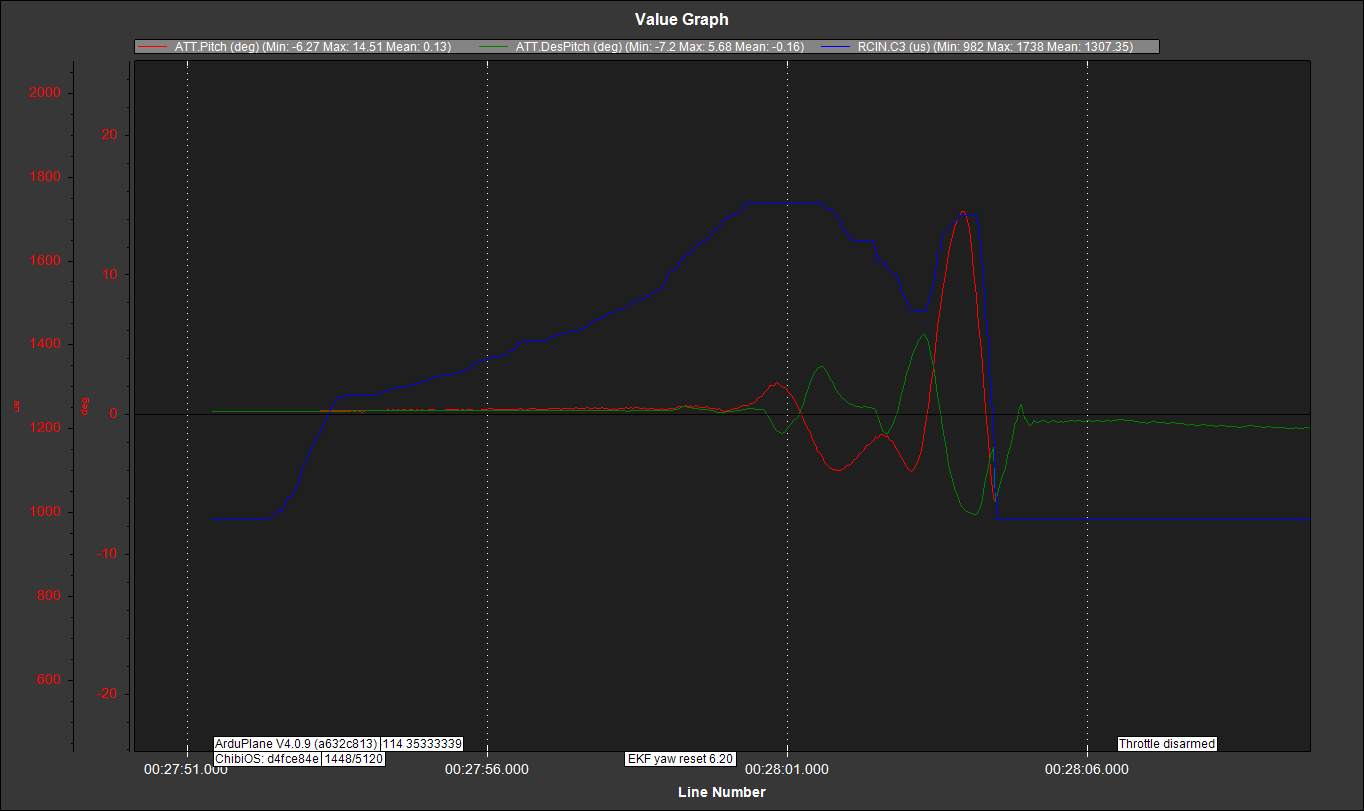
My conclusion is that the IPD tuning did not really help and large ~50% Throttle changes still create large ~5 deg Pitch changes. I am also seeing ~1 deg Pitch Setpoint drift. So the vehicle is still very difficult to fly. Here is a picture of the Pitch (green), Despitch (red), and Throttle (blue) for the most recent test/crash:
I have done some testing in SITL using a similar in function Convergence RC model. The same changes in Throttle inducing changes Pitch is observed. But it is not observed in the stock mini Convergence that comes with RealFlight, which uses a different flight controller algorithm. Also I have developed my own RealFlight simulation of my full scale vehicle, which does not use a flight controller and flies very well, and shows no affect of throttle on pitch. These tests indicate that the flight controller in Ardupilot is not working well and is causing this problem. Please refer to the following link for more detailed information about these tests and discussion:
William