Hi, We are seeing very bad behavior in the flight controller and wonder if there is a fix? Basically we are seeing large ~5 deg pitch changes with large changes in Throttle in VTOL aircraft. I don’t think this problem is limited to Plane Beta 4.2.
Exemplifying this is a Convergence SITL model based on Plane Beta 4.2. Here we are seeing ± 5deg pitch changes with large changes ~ 70% in throttle. Here is the log file of our test, and a picture of the pitch (red), DesPitch (green), and throttle signals (blue):
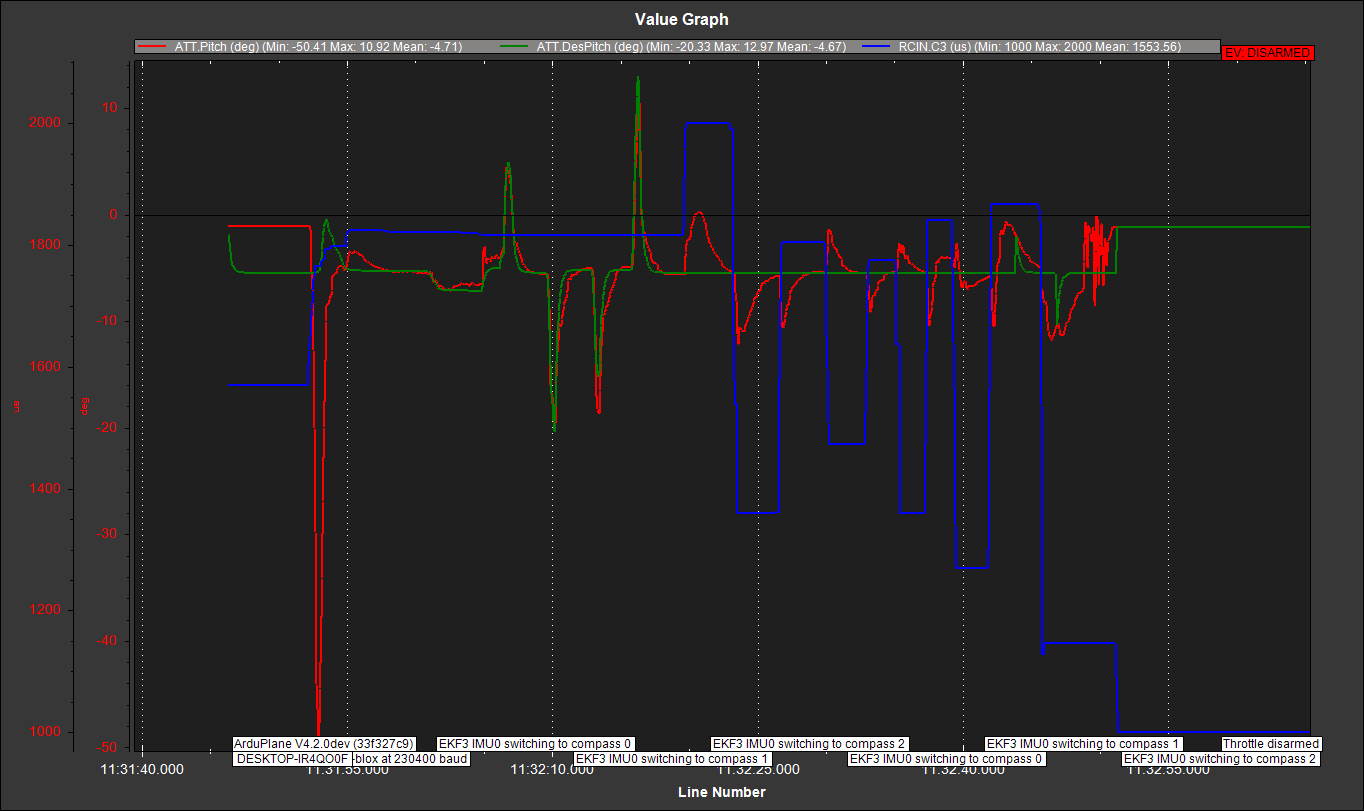
Log file:
In comparison, the stock mini Convergence, or any quadcopter that comes with Realflight 9.5 does not show any affects of throttle on pitch. Since the flight control algorithm is different. This indicates the effect is being created by the Ardupilot flight control algorithm.
I am developing a large RC controlled tricopter VTOL using Arduplane and we are seeing ~ 5 deg pitch changes with large changes in throttle, making the vehicle very hard to handle and has crashed many times. Here are two videos of the vehicle being tested. The first has PID (a lot more P than I) tuning, and the 2nd has IPD (a lot more I than P):
First test using PID tuning:
Log:
Second test using IPD tuning:
Log:
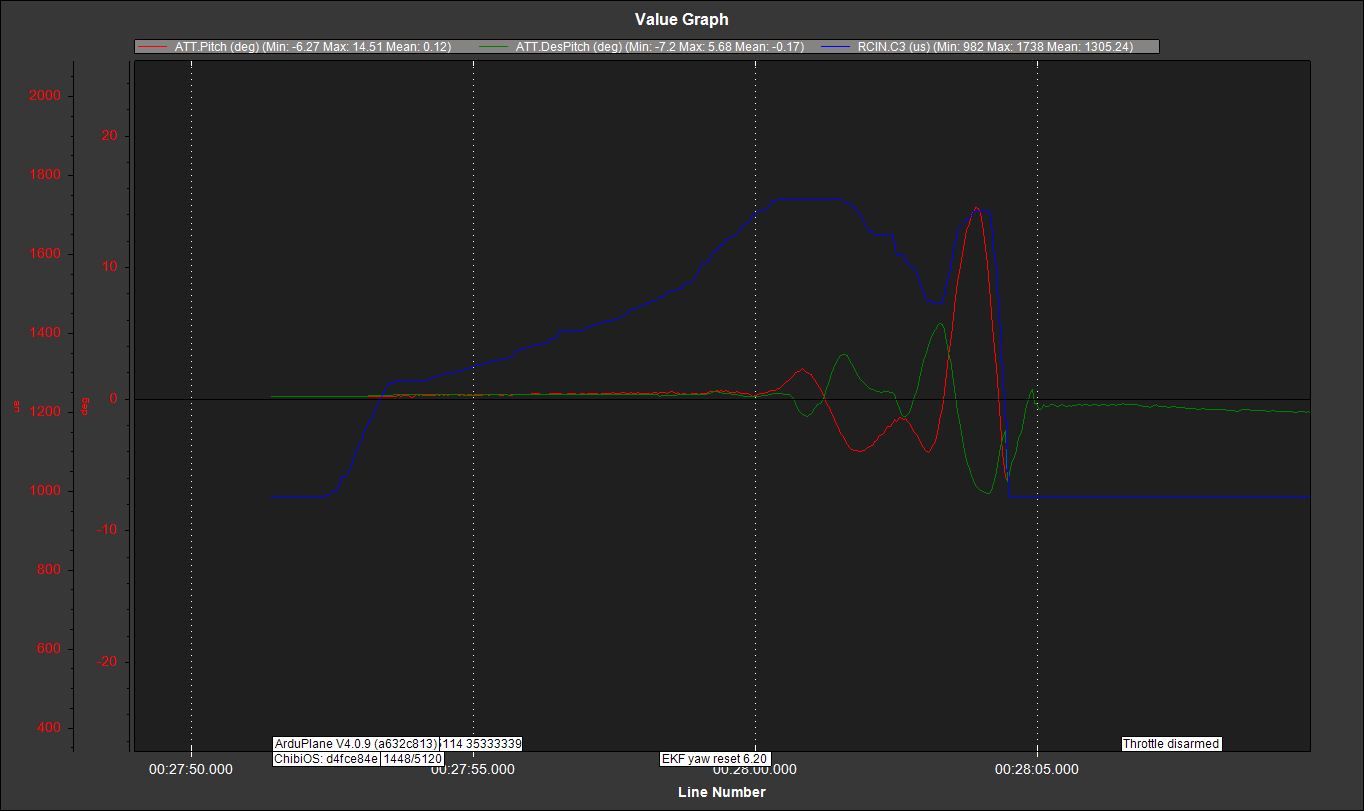
Throttle (Blue), Red (Pitch), Green (Despitch)
We would like to find a solution to this problem.
Here is a link to see the vehicle and details about its construction:
I have also developed a CAD model of the vehicle and have it flying in RealFlight 7.5, but it does not use a flight controller and flies very well. The reason is that the vehicle weighs 200 lbs and is the size of a large station wagon, which has high rotational inertia, and large stabilizing gyroscopic effects from the 32in props. The key point is that the pitch does not change with large throttle changes. Here is a link to see the vehicle flying in the simulator:
We are now considering taking out the flight controller because the vehicle is too hard to handle with Throttle causing Pitch changes.