No, you can see I have set it to .17 in the above screen shot. You can pretty much ignore the max/min ranges shown in the description of Mission Planner. But if you continue to struggle with this set the I value to .2 and P value to .4.
No, it does not as I have said. If it did the screen shot I posted wouldn’t be possible. Here is another one from my 7" craft with very high high thrust/weigh which requires low PSC Accel Z values.
You are going in circles and have lost a methodical approach to tuning this craft… Perhaps you should start over. To do so:
Reset to default
Perform all Mandatory Calibrations.
Perform the Initial Parameters Setup.
Set the Pitch/Roll Rate P&I from default .135 to .100
Set the INS_LOG_BAT_MASK to 1
INS_ACCEL_FILTER to 10
Make a simple hover flight in AltHold for a couple minutes assuming the craft is basically flyable. Review the log for motor output oscillation and if present set the PSC AccelZ values based on the learned MOT_THST_HOVER value. I don’t know why you can’t save a value below the suggested range. If at this point the motors are not oscillating you can start to tune the craft starting with Notch Filter configuration.
Able to set the values that were going out of the range I don’t know what’s wrong, with using a different PC I was able to enter them this time. the att control got significantly better this time.
I also enabled the harmonic notch using rpm sensing. I need your bit of help to identify whether the notch is working or not. Bcz in the FFT graph, I cant see much difference. I have used the notch frequency below the hover frequency from an earlier flight
Rest I can start an auto tune after this and mostly this will be done.
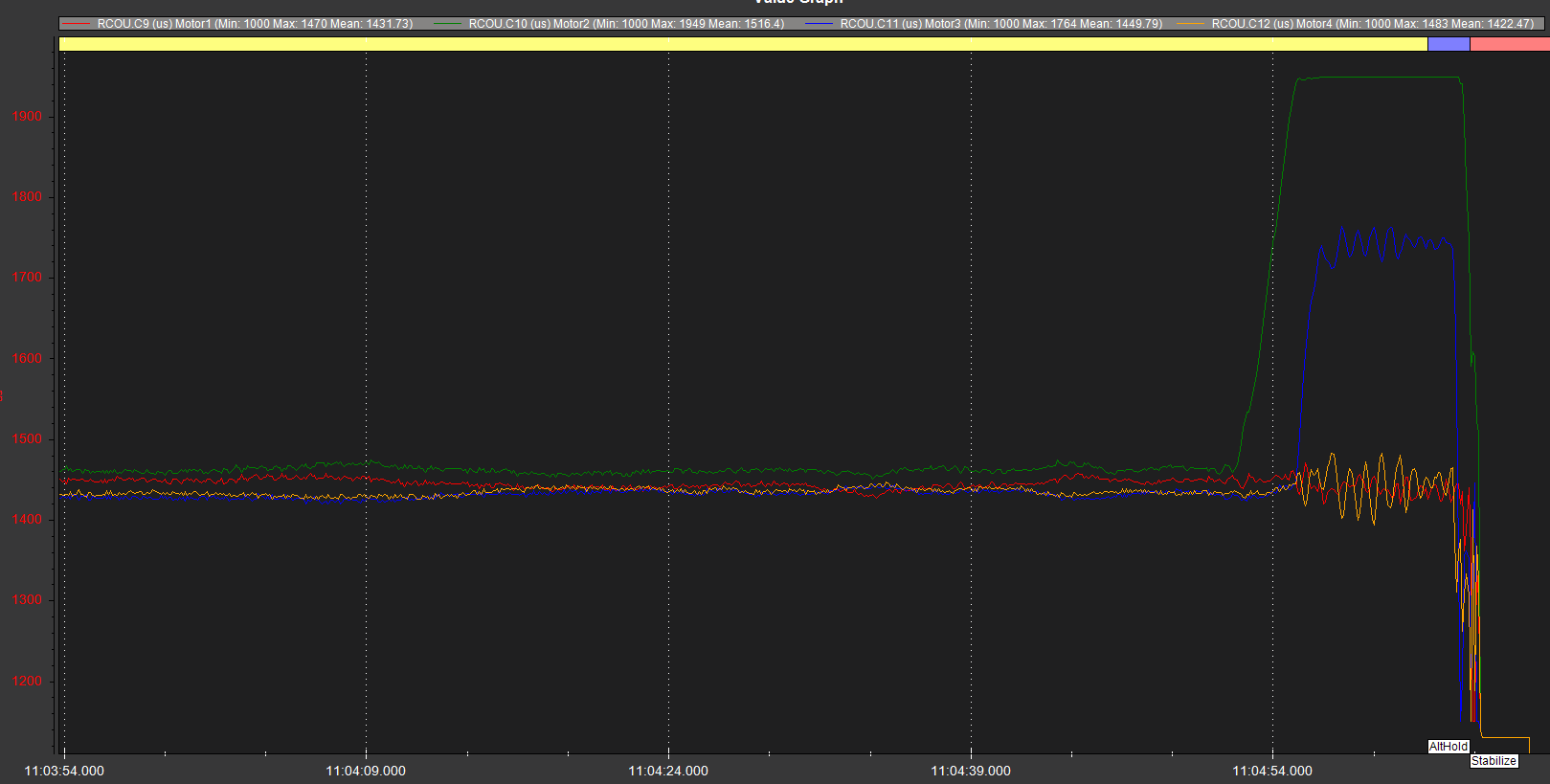
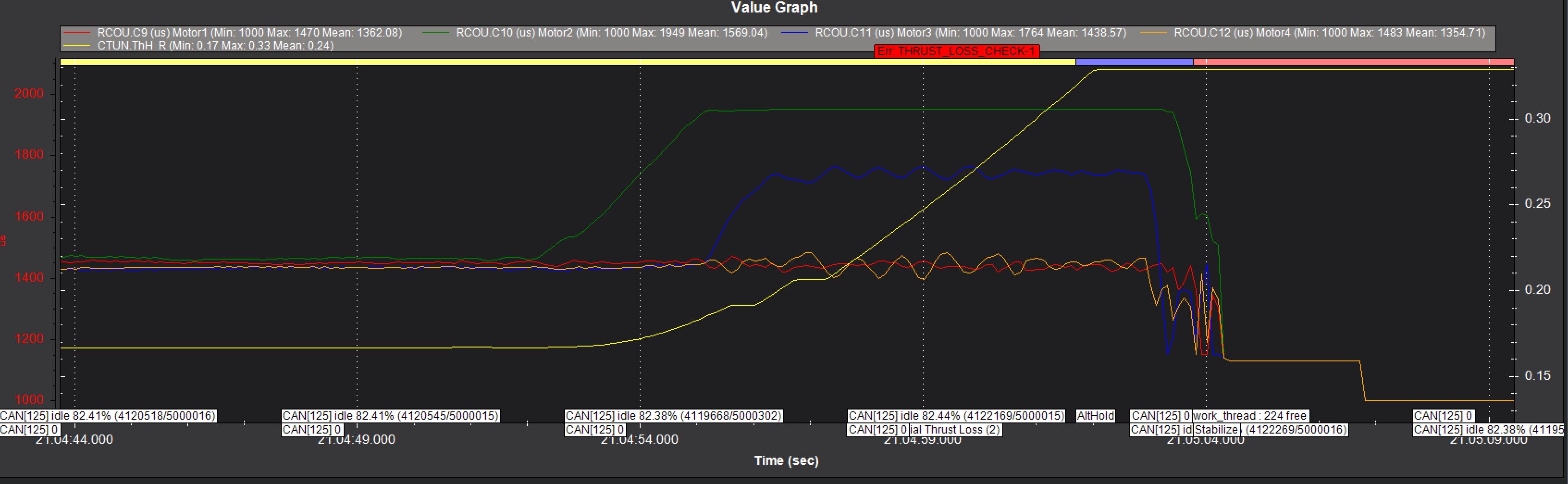
I was doing a hover test in loiter mode to calculate the flight time but around 7-8min into hover I got a potential thrust lost error and the drone become sluggish and start descending there was no slag spike in the battery. What i should do to rectify the problem.
I reviewed the documentation
"These warnings are the result of a motor or motors saturating at 100% throttle. Because of this saturation, ArduCopter can no longer achieve the requested roll, pitch, yaw and throttle output. If this continues for a prolonged period of time the vehicle will have reduced altitude and attitude control and may crash.
If these messages are seen in hover or relaxed flight, the problem must be fixed in hardware. The vehicle’s thrust to weight ratio should be increased, either by a change in propulsion or reduction in mass."
My hover thrust is coming around 0.16 dose this has to do anything with this issue. should I try increasing the weight?
Motor 2 (RCout10) or its ESC had an issue, possibly due to voltage dropping.
Motor 3 (RCout11) was also cutting output.
ESC temperatures and voltages are not reported unfortunately.
You will note from the log this happened when Motor 2 was no longer supplying thrust so it learned a new higher value. Of course it’s wrong so after determining why Motor 2 lost thrust you will have to learn a new value.
Hello, Shawn, i was going through some of the posts related to BLheli 32 esc on large quads I saw
you have posted some settings related to them should I consider using these.
For the PWM frequency Should go for 48kHz or leave them at default 24kHz
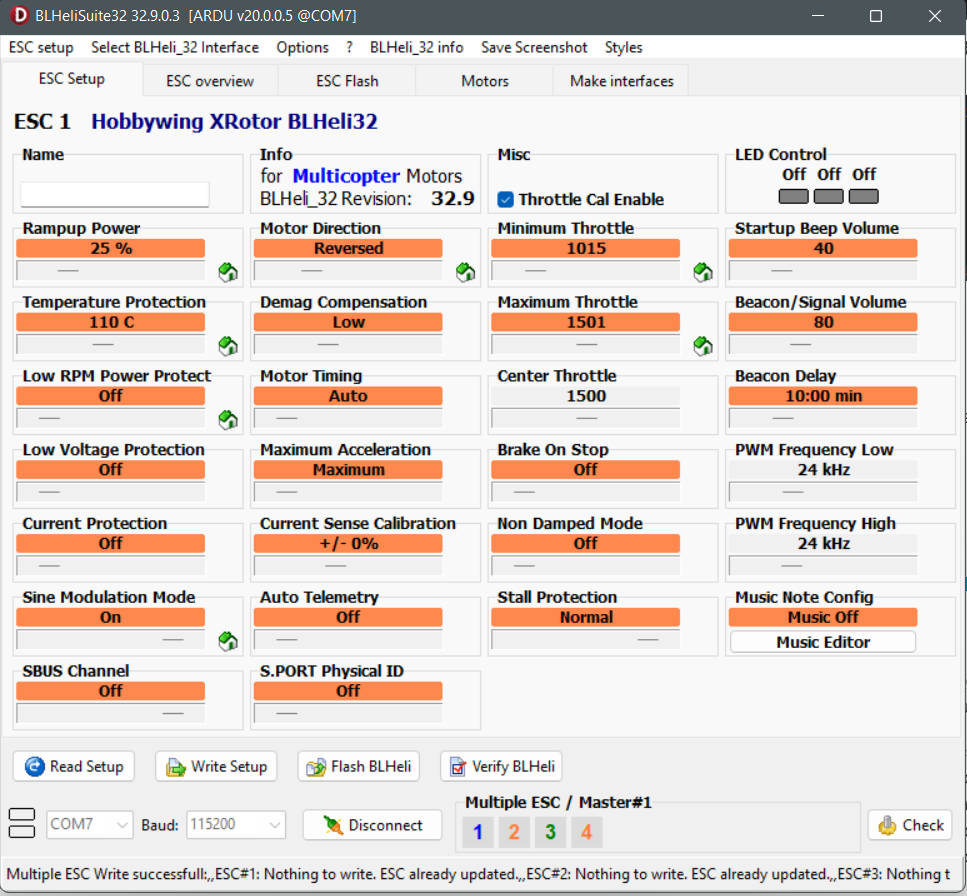
"All are defaults or “Auto” where possible, except these ones altered
Rampup Power = 25
Temperature Protection = 100
Low RPM Power protect = OFF
Low Voltage Protect = OFF
Sine Modulation = ON
I think these are the default values I see that most people are worried about, and I leave them like this:
Demag Compensation = LOW
Motor Timing = Auto
PWM Freq Min = 48
PWM Freq Max = 96 "
My ESCs allowed me to set that PWM frequency range - maybe yours dont. It’s probably not very important anyway. That refers to the PWM driving the FETs, not a PWM input signal from a receiver or FC.
One thing I see in your screenshot is the Min/Max throttle values. When using DSHOT you dont need to calibrate the ESCs (like you do with old PWM ones) and the throttle Min/Max should be at defaults.
I suspect that only matters if you use PWM though, and it might not matter at all with DSHOT.
I would set them at defaults anyway, just to be sure.
I also found lowering the temperature protection to about 100 was realistic. This gives BLHELI a chance to start limiting output when overheating. The tiny little CPU chip on these locks up at about 120 degrees, so the default of 140 is unrealistic unless your ESCs have a temperature sensor right on the FETs.
@dkemxr@xfacta Tried a loiter flight today with updated ESC params and again the same thing happened with motors 2 and 3. This issue I am facing after doing the Yaw auto-tune and enabling the notch. Will try to revert the changes and do a test flight.
I have changed the esc to holybro tekko32 65amps. I have attached the telemetry to the Rx of the Telementry2 but am unable to get the telemetry data in the status bar.? any suggestion already selected the protocol and set the burd rate to 115
Hello @dkemxr I have tried fixing the issue with motor dynscing for the past week but the problem remains the same i have changed the ESCs and also done the test on a similar copter. Always the same motor (Motor2) gives the issue.
I am unable to figure out the issue it was flying fine but suddenly this issue is occurring. Should I try downgrading the firmware to 4.1.5?
No, you should try to fix the issue by using the *_SMAX parameters. Those parameters are there to prevent de-sync issues and are the correct tool to fix this.
This is of course after you have correctly set the notch filter.