I am not even sure about the issue. The copter files for 2-3 min and then suddenly falls to one side.
I can send some video links if u are interested in watching visuals and this copter with the same setting was flying very fine few days. I have made a similar copter with the same components and structure to verify for a hardware issue but the same issue is also going with this setup.
I do not have the time to look at the logs now. But if you have de syncs because of high actuator slew rates then it does make a lot of sense to limit the actuator slew rates using the parameters that are meant to limit the actuator slew rates. IMHO
@dkemxr@xfacta So I have changed the ESC from 4in1 to Hobbywing Xrotor 40amps and connected them to PWM 1-4 and took a test flight and this hasn’t got any issue related to rearming and motor de-sync. I think there is a bug with the 4.2.1 related to the auxiliary port with bdshot version of the firmware.
log https://drive.google.com/file/d/1cp7ST-H_5e2c_GJg2alo-0IQToVydxp6/view?usp=sharing
So I have changed the ESC from 4in1 to Hobbywing Xrotor 40amps and connected them to PWM 1-4 and took a test flight and this hasn’t got any issue related to rearming and motor de-sync. I think there is a bug with the 4.2.1 related to the auxiliary port with bdshot version of the firmware.
I will now try to reconnect the 4in1 esc to the PWM output and test whether the issue persists or not.
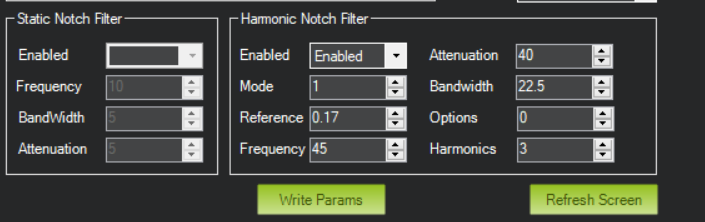
I am now using a throttle-based notch filter can you please check the values I have achieved for the notch form test flight.
I will now try to reconnect the 4in1 esc to the PWM output and test whether the issue persists or not.
I am now using a throttle-based notch filter can you please check the values I have achieved for the notch form test flight.
I haven’t been following this thread but those motors have 24 poles and in the one log I looked at you had left the number of poles at the default (14) the ESC driven notch won’t work at all if you haven’t configured the number of poles correctly
in the recent logs if u can check the parameters are correct and still, the drone crashes and I have tried different variations with aux and still, one motor is stalling after switching to normal PWM frequency it flying fine but i cant use rpm-based notch so need to set up throttle based one.
Hello, So i have tried using the 4in1 ESC and connected the Telemetry to the Serial 2 Rx (Telem 2 port on mini carrier board) Change the serial parameter to 16 for telemetry support but no luck. Telemetry is not working.
All the connections are correctly done as per the tuning guide. What do I miss?