Does the phrase “just before the start of your landing sequence” mean: At the next waypoint? Does the landing sequence “start” at the first waypoint after the DO_LAND_START command that is at a lower altitude than the current waypoint?
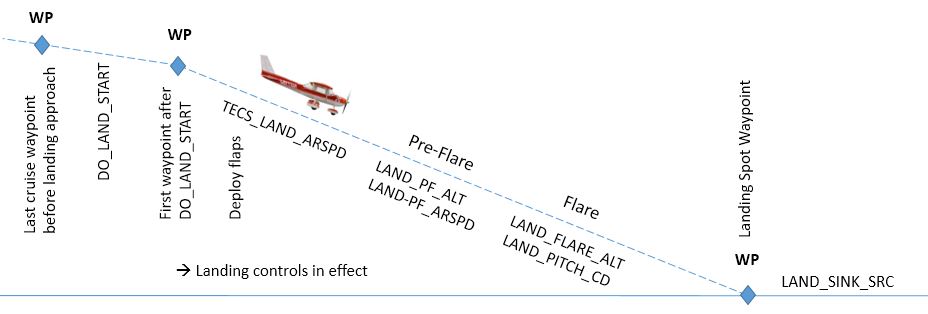
Had another flight this evening and indeed the logs show that the flaps deployed at the first waypoint after the DO_LAND_START command in the flight plan.
So I will also assume that the TECS_LAND_ARSPD begins at that same point also.
Also, tried some hand launched auto takeoffs. Had to reduce the TKOFF_THR_MINACC parameter down to 5 m/s/s to get a reliable motor start from my mighty throws.
I tried my hand at auto-landing today, several attempts, with mods to the mission between each, and I have to say nothing went right, except I avoided an outright crash. Will post logs, param files, etc., tomorrow, with summary of what I was trying to achieve, and how far off it all seemed. Thankfully the mode switch was hands-on throughout, and either Manual or RTL to the rescue.
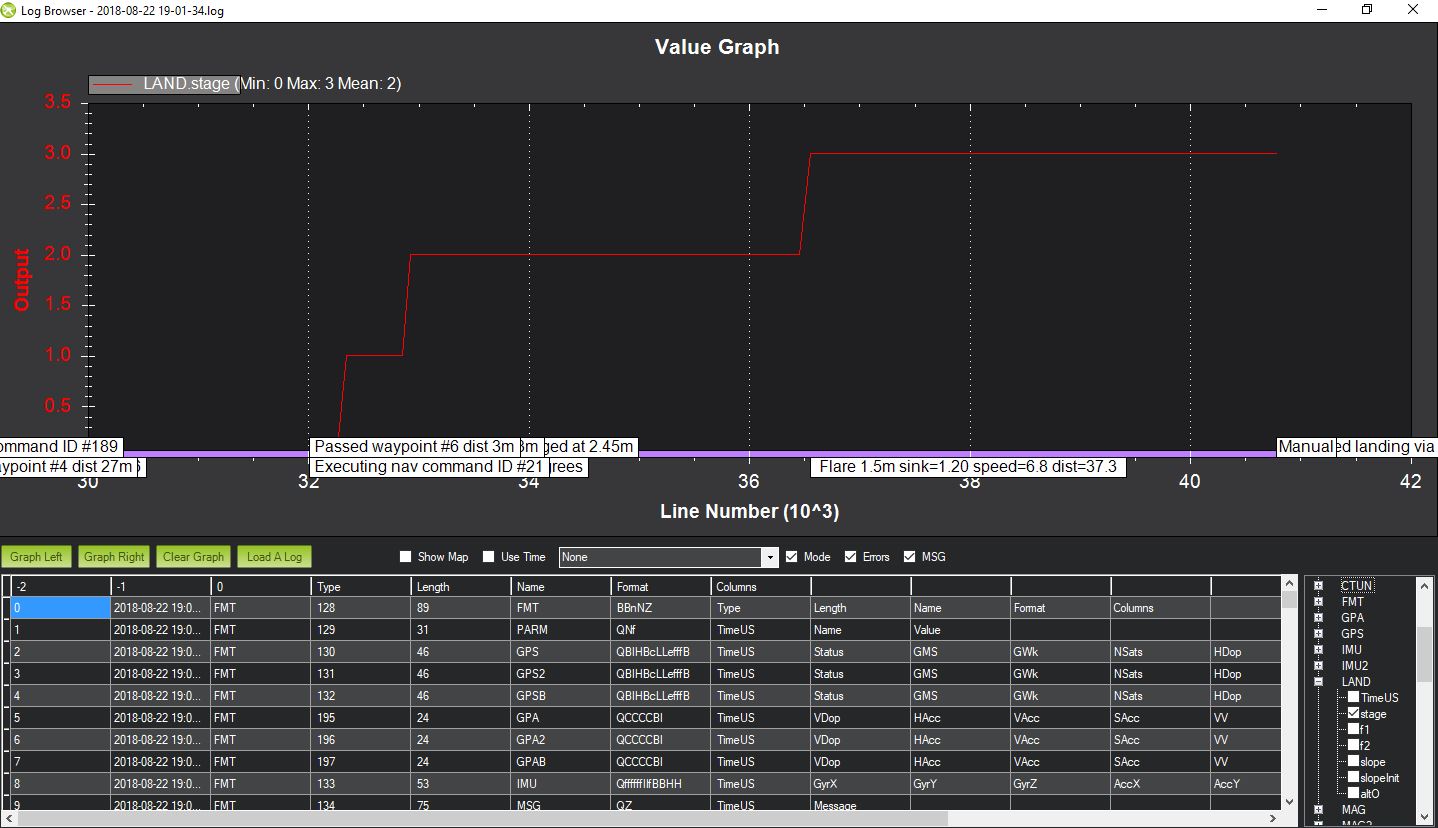
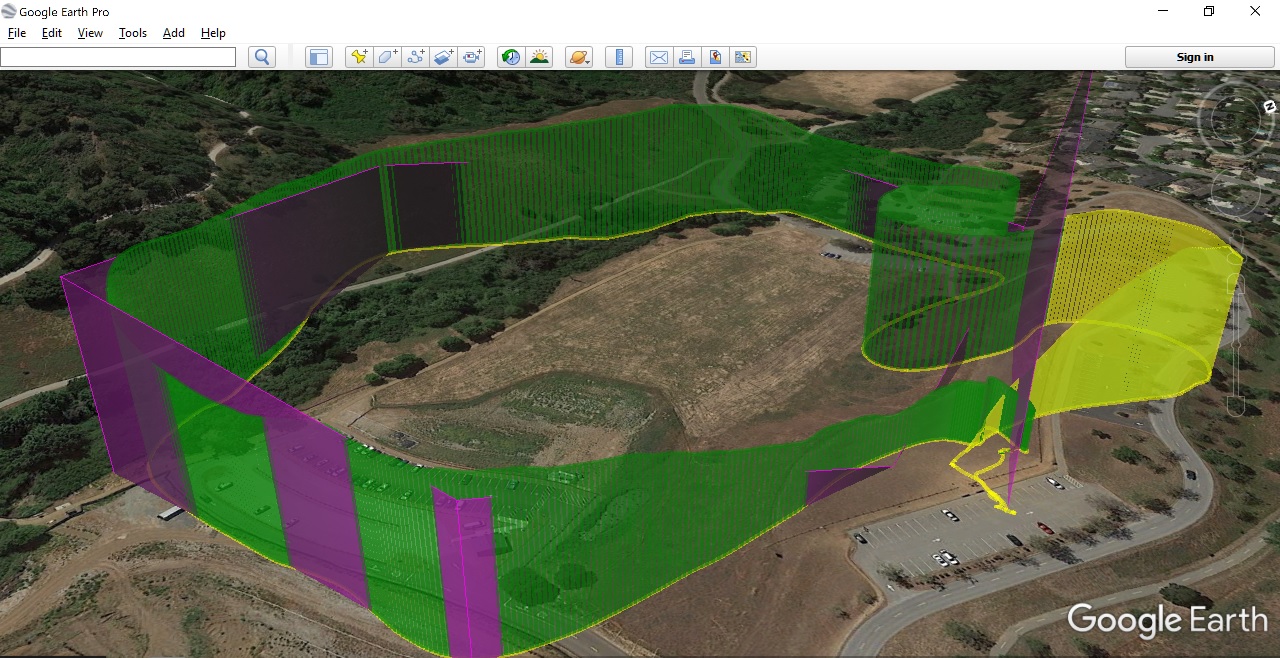
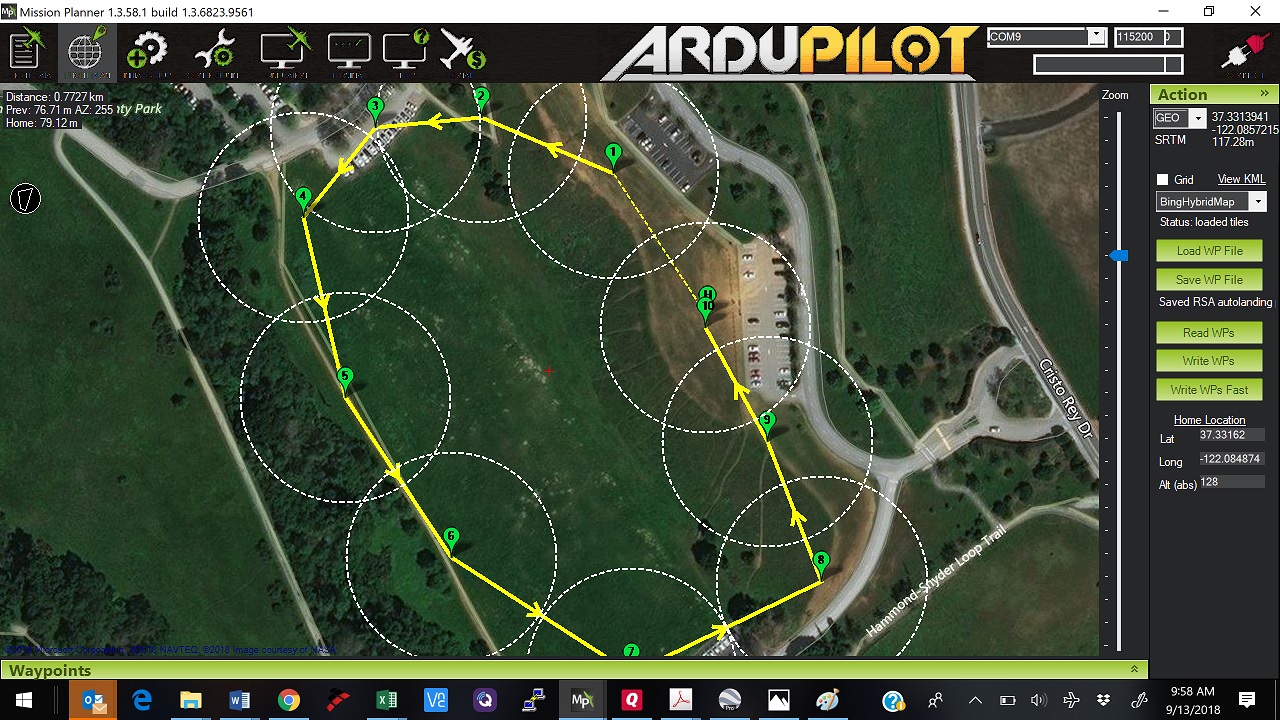
I appreciate any insights you might have to the logs, graphs, params, mission plan, .kmz’s etc of my first real auto-landing last Friday. Everything is here in a dropbox folder, including video footage of the landing from my hatcam (including pilot narrative on stick inputs), and OSD recording. My flight cam was acting up, but at least the OSD and VTx were operational. I’ve gathered a few key scenes from the log and from Google Earth. Those are in the PDF. My main head-scratcher is why actual altitude ended up so high above LZ. Note that I had stall prevention off, STAB_PITCH_DOWN = 0, and SERVO_AUTO_TRIM on, among others. This is my first series of attempts at auto-landing, so who knows how many parameters I have coded improperly. Note also that ARSPD_FBW_MIN = 9 m/sec, which I am thinking is higher than it should be for a slow, floaty glider like the Radian Pro, which can fly as slow as ~6 m/sec in still air. Welcome any insights you have. Below is the .kmz of the last few minutes of the flight. Yellow is FBWA prior to green, which is the Auto, and purple is the flight plan. If nothing else, watch the amusing last 20 seconds of flight in the hatcam video: stall -> flat spin -> pancake landing, though apparently no damage. Thank God for foamies.
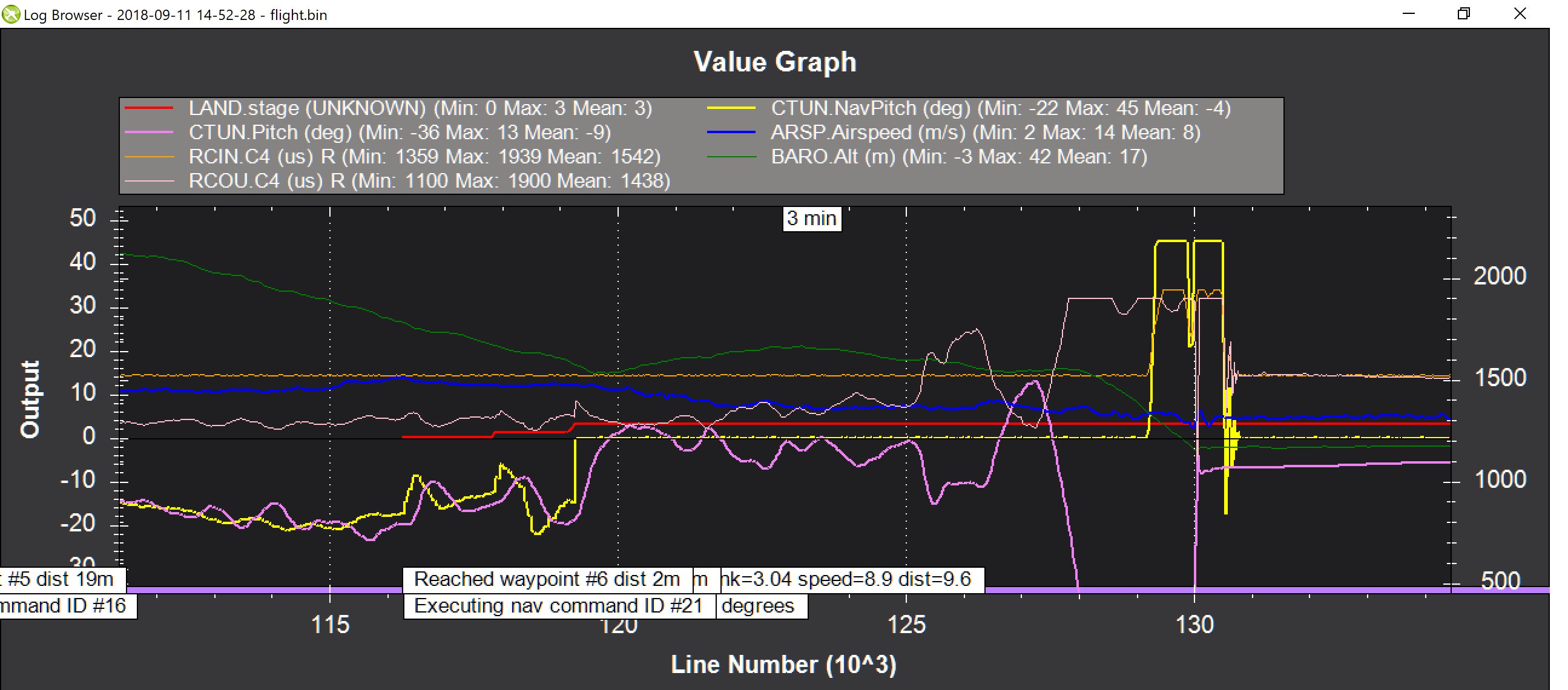
And here is an interesting graph from the DF log of the auto-landing. Bold pink line is pitch, and you can it nose up around line 126, airspeed (blue) drops, then nose pitches steeply down (watch hatcam video last 30 seconds), and elevator servo (RCOU.C4 in thin pink) goes high (not sure what is cause and effect here). My stick inputs are the gold colored RCIN.C4, and go high very late, long after glider is spiraling in, as shown by BARO.Alt in green. I guess one of my questions is why wasn’t glider close to touchdown by WP#7? Did I have too steep a gradient between WP#6 and WP#7? Actually, as I study the flight plan in MP, I am realizing I called for altitude ~12.2m at WP#6, which is only 37.4m from WP#7 (Landing WP). That would result in a gradient of 34.5%, which the flight controller would command a steep pitch to make, right?
FWIW, I originally entered the flight plan in feet not meters, but switched MP to display meters as log values are obviously meters only.
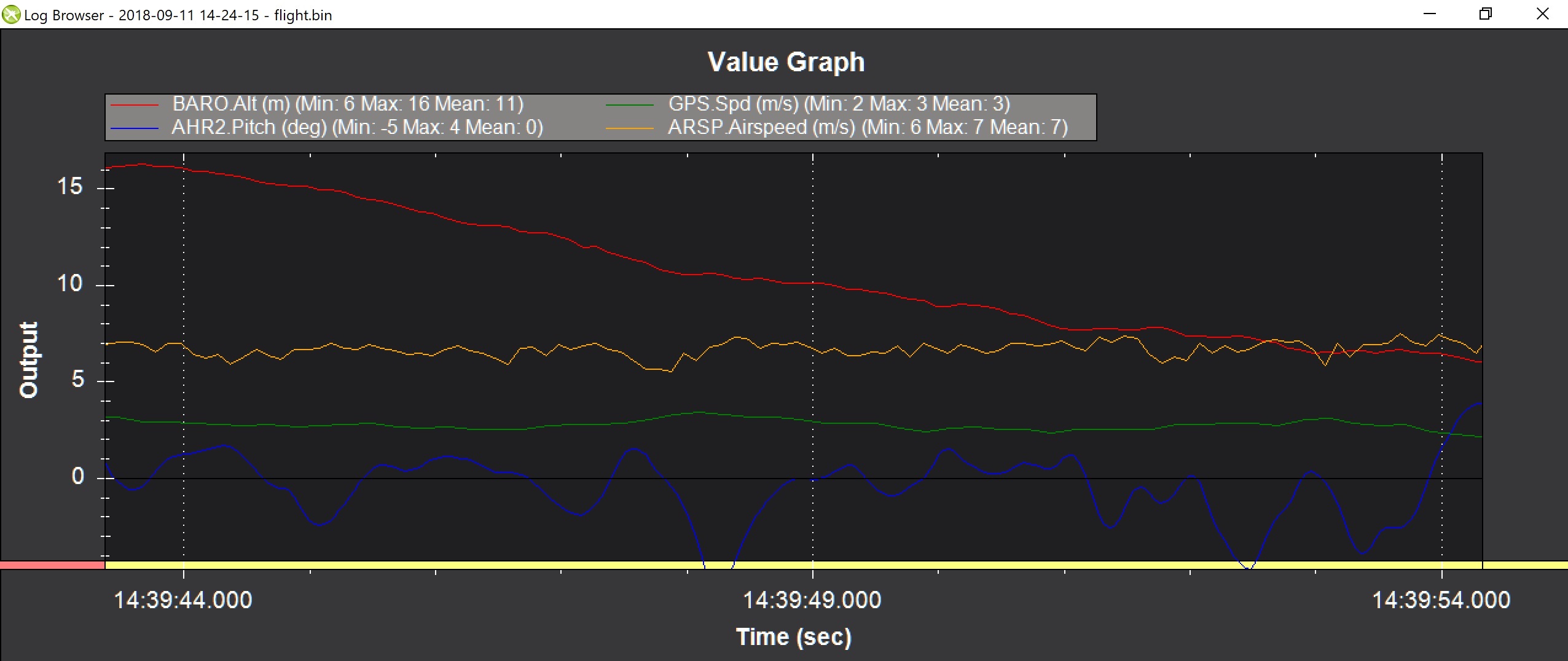
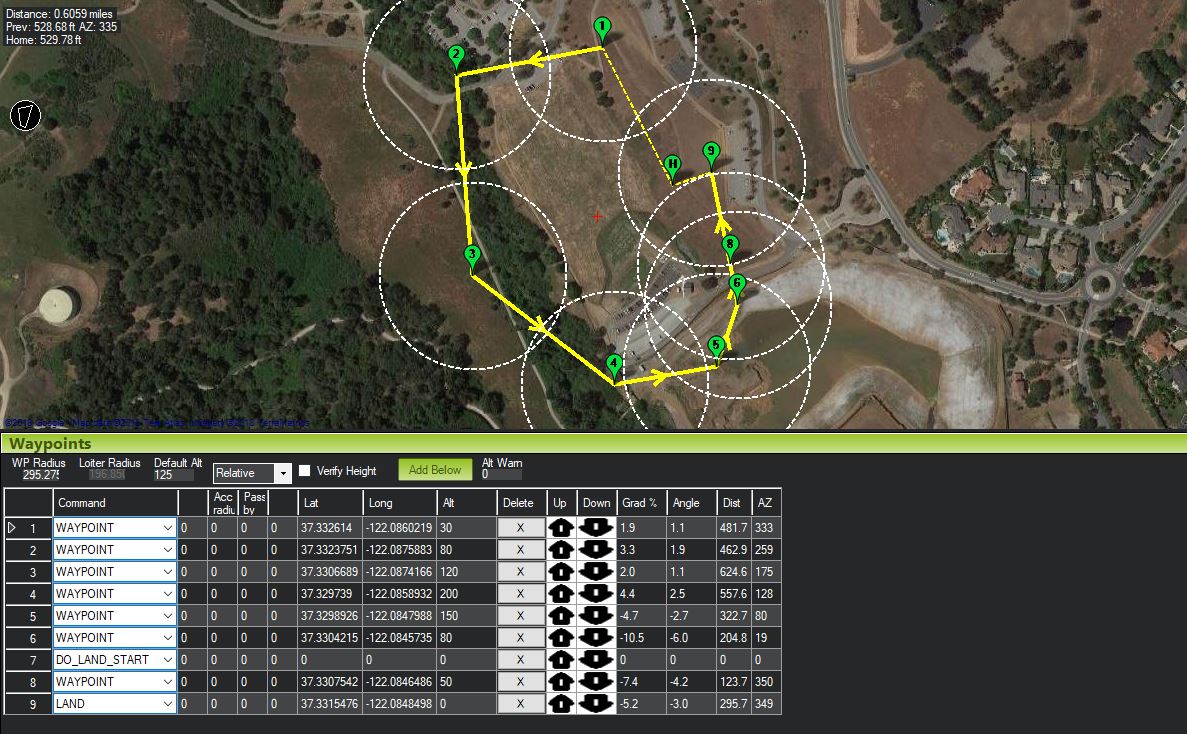
So I studied the flight prior to my autolanding flight last Friday, looking at sink rate and GPS ground speed during a smooth slow landing (FBWA) into a mild breeze. Sink rate is approximately 1 meter per second, and GPS ground speed is approximately 3 meters per second over the ground, which suggests to me that a waypoint 60 meters from landing point should be 20 meters in altitude. Does that sound right? Here are graphs of the stable slow FBWA-assisted hand landing, and a new flight plan based on that 3:1 profile.
I am realizing that neither airspeed of 7 m/sec nor average pitch of zero degrees from a representative landing mean a whole lot in setting waypoints for auto-landing, right? If anything, landing waypoints would be adjusted based on current wind in the LZ. Higher wind = higher altitude at last waypoint a given distance away, and lower wind = lower altitude of last waypoint a given distance away.
It looked like the autopilot tried to land the plane while it was still at altitude, and instead it stalled and spun in.
I would try a landing approach with these minor adjustments:
Placing the DO_LAND_START command after waypoint 6 tells the autopilot to begin slowing down for landing at waypoint 8. The “final” approach will begin at waypoint 8.
The autopilot should slow further to the LAND_PF_ARSPD when the plane descends to the LAND_PF_ALT. The pre-flare altitude should be about halfway along the final approach between WP8 and the landing spot WP9.
Would you mind taking a look at the attached flight plan? I tried to incorporate your suggestions. I changed my MP to be meters-based. Also, here are my latest LANDING parameters that I plan to fly with on Friday:
You do not want to use the deep-stall landing style do you? If not, make sure that that option is not activated so all those parameters including “DS” do not come into play.
I kept my altitudes in feet but changed over to meters per second for airspeed. Once I get used to judging altitude in meters I may also switch over them for altitude as well.
I would change are the pre-flare values. Start the pre-flare a little lower, say 6 meters and reduce the pre-flare seconds from 20 to something like 3, 4 or 5.
Also, trying making your TECS_LAND_ARSPD something like 8 m/s. Looked like you were flying a glider that should be able to handle slowing down to 8 m/s and less. The autopilot will try to slow the plane down to this speed once the final landing approach has officially begun. The final landing approach officially begins at the waypoint after the DO_LAND_START command in the flight plan. At the pref-flare altitude the autopilot will attempt to slow the plane more to 7 m/s in preparation for the flare at the LAND waypoint.
Some amount of flaps more than 20% might also help to slow it down further as well. Say 33% or 50% if the airframe mechanics can do it. With auto flaps set the flaps should deploy at the official start of the landing approach as well. Do you have actual flaps or flaperons? You have to set the channel 7 function to auto flaps (3) for them to deploy.
As a matter of style I prefer a long shallow approach (2-4%) with the airplane carrying power up to the flare point. Depending on your surrounding terrain and obstacles near the airfield you may need a steeper glide slope - I had to go to about 10% glide slope to have the plane descend without the motor running. Of course that is up to your glider’s descent characteristics.
Last Friday I flew two auto-landing missions, both of which I aborted with throttle for a variety of reasons. I’ve attached a write up of each landing attempt, including screen grabs from Google Earth views of the landing attempts, and an analysis of the messages in the DF log. (PDF broken into 4 pieces due to upload size limitations.)
I’ll PM you a link to the dropbox of all the files, including hatcam and flight cam + OSD videos. My principal question is which of my parameters (TECS_* or LAND_*) is likely responsible for aircraft being 7m to 12m above waypoints, and overshooting the landing. I think it has something to do with the speed/altitude weighting. Welcome your insights.
I watched the video and in the first attempt the plane flared almost to a stop while still high in the air. Then it began to stall and then you took over and recovered.
My first instinct is to start the approach lower. The glider simply does not have enough time and space to come down.
If you had your TECS_SPDWEIGHT set to 1 for these flights then I do not know why it would flare while still at altitude - unless it is because it is really respecting the time values set by the LAND_PF_SEC and LAND_FLARE_SEC parameters. Try zeroing them out and use only the LAND_PF_ALT and LAND_FLARE_ALT. Is your barometer giving sensible values throughout the flight?