We have copter with that require these settings due to using KDE motors and ESCs:
MOT_SPIN_ARM=.22
MOT_SPIN_MIN=.225
MOT_THST_HOVER=.33 (from the auto hover learning process)
We’ve noticed that when we land it using the LAND command that it tries to spin up after hitting the ground and then topples over and spins itself into the ground breaking many props in the process. Are there any other parameters that would impact the landing detection process.
Also, why not use mot_spin_min for the landing throttle test rather than .125 * mot_thst_hover?
Do you think that having:
MOT_SPIN_MIN=.225
MOT_THST_HOVER=.33
defeats the current land detection logic?
The only way that I can see that the first check would executed is if the last set of logic that sets land_complete(true) didn’t disarm the motors for some reason. The code appears to disarm the motors when land_complete is set.
I noticed that the simulator would not turn off the motors after landing with FS_THR_ENABLE=0, but would sometimes with 1. Not sure if it is a fluke in SITL or a real bug.
I have your thread open for at least a week but my time is lacking to look at it. But I can answer your last question: if your ESC have fixed min/max points, yes, you need to set up those parameters, otherwise ArduPilot will use whatever are the min/max of your RC3 values.
I agree with @OXINARF that if the ESCs can’t be calibrated the MOT_PWM_MIN/MAX should be set. I’m pretty sure this is mentioned on the wiki but please tell me if you think it’s not clear enough.
I don’t think there’s a conflict in the code re MOT_SPIN_MIN value and the parts of the code that check 0.125*hover or hover/2. It’s hard to explain but the throttle output and hover throttle are in the 0 ~ 1 range where 0 is controlled by the MOT_SPIN_MIN.
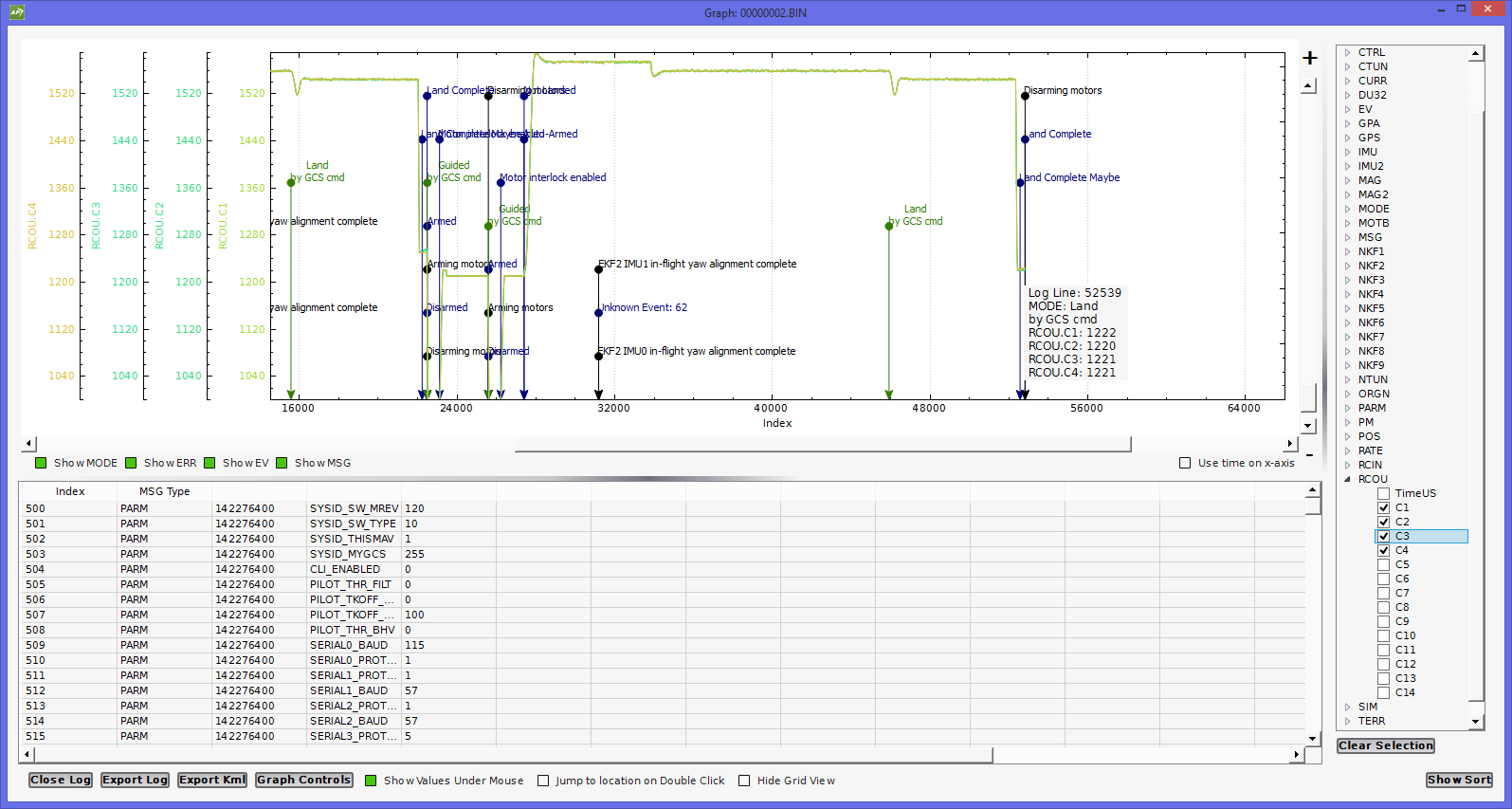
The most likely cause of the failure to detect the landing is the vehicle’s accelerations are too high. That could also be caused by vibration. Really we’d need to see a log to be sure.
P.S. I’ve been off in Australia for the last two weeks at the ardupilot un-conference and then some unrelated work but I’m back on it now and hope to release AC3.5-rc2 this week.