I think its partly environmental (temp) and partly electrical. The temp I think we can solve by dynamically adjusting, the electrical not sure we can. @tridge was going to work on the temp thing “soon” 
By electrical,did you mean that the power input to the MPU6000 on KakuteF7MiniV2 is not clean?Do you think installing a small 220uf Capacitor on it’s 3.3v rail would make it better?Thanks.
Or at all. 123456789
I did install a 220uf cap directly on the power pins of the 3.3v reg, next to the IMU.
No difference. I insulated the IMU with foam… Little difference. That was back in the winter when I was going from a 70f degree house out into sub zero temps.
I’m not convinced the issue is only temperature, because my bigger copters w/ same FC don’t do it. I have a copter w/ 6" props and an omnibus nano, and it doesn’t lean. That exact same FC (not same model, but this same FC) did lean on my 3" copter.
Also the leaning issue is the same across seasons… Below freezing leans the same as when it’s over 100f out. W/out a doubt temperature affects it. You can calibrate, let the copter sit on the bench and warm up, and watch it develop the lean in relation to the temp.
But, what I think is a different issue, is it develops a lean as soon as I power the motors. Almost immediate… So regardless of the slow temp lean, I give it throttle and it immediately develops a lean in relation to the amount of throttle I give it.
I’m always happy to see more people w/ the issue though :). I don’t wish you to have problems w/ your copter, but I’m glad to have more people trying to figure out what causes it.
-edit to mention again. Vibes really seem to be one of the causes. My vibes are SUPER LOW… under 5. But the lower they are, the less it leans. Vibes of 3 are better than 5. But my bigger copters can have vibes up in the 30’s and don’t lean.
Edit 2, back to electrical… My ESC is not mounted directly under the FC on my 6" prop copter, and it is on all my smaller copters w/ the leaning issue. Maybe related. I’m thinking about changing to a little 4 in 1 esc on my 6" copter, so that might be a good test…
Thanks wicked for the info.
I think its the bad IMU at first place and then Ardupilot somehow makes it worse.I am saying it because i installed INAV on this board and right after calibration,when the board was cold,my copter was leaning by 4 deg.Which should have been at 0 deg.So this points to bad IMU chip.But on INAV,i did sensor board calibration by adding the value of 4 deg.It stayed there even after 30 mins and even when its cold.And INAV uses 6 side calibration method.
So on Ardupilot,after calibration,when we see the quad is tilted on the HUD, we do level calibration and i think after level calibration,things are getting bad.Also my esc is 5~6 inches away from the board and vibration level are normal around 20.
Now the question is why on INAV this board’s roll stays same at all temps and on ardupilot,it starts tilting?
it’s fine on px4, too. So… something related to the way arducopter interprets the data from the IMU.
Do you think we should open an issue on github then?
I think the people who care are already doing what they can…
Most people using ardupilot are using bigger flight controllers and vehicles which don’t seem to have this issue. It’s a community developed project, so people work on what affects them.
I do wonder if it’s the quality of the IMU on these cheap boards. Maybe some manufacturers test them, and sell the rejects to other manufacturers. (Only speculation, that’s based on nothing) Mine all lean differently… even swapping FC’s on the same copter. One might lean left, the next one back. One severe, the other, not bad. Which takes me back to what I already said about our inexpensive boards… Most people aren’t using them with ardupilot.
(But hopefully more and more will, which will lead to more development on issues like this. Vehicles are only getting smaller, so I really expect more and more will be joining us on the ‘light’ side. Or maybe we’ll see an official expensive 20x20 board with premium components… one can dream…)
I totally agree with you what you have said.Who knows they get rejected parts at 1/3rd price.
I would like to get MPU6000 from digikey and replace it on my board.I have hot air station.I have already replaced HMC5883 magnetometers on my GPS boards.So I think it’s doable.
I really like the form factor of this kakute F7 mini board.My other omnibus f4prov3 boards never had any leaning problems.
Just to re-iterate what I know abut the problem:
- “Level” is determined by the EKF using multiple sensor inputs. Accels are one of those but not the only one. This allows the EKF to correct for bad sensor data including accel data modified by vibration. This is why the leans are better with GPS enabled.
- According to Leonard you can get the leans in BF by flying around hard - this is because they don’t do sensor fusion but are reliant on the initial level which can go out of whack over time with vibration. AP is able to compensate for this.
- Vibration will cause the leans for sure, but the copter should return to normal when vibrations stop. One thing that can prevent this is the EKF “learning” the new normal during dynamic flight. To prevent this I set
EKx_ACC_P_NSE = 0.6andEKx_ABIAS_P_NSE = 0.0005andEKx_GBIAS_P_NSE = 0.0001. These make a big difference to my experience. - The leans that are really bad are the fixed offsets that you see on accels. These can be quite high (e.g. 1m/s/s == 10% gravity) and are definitely the cause of the problem. Why is the question - it appears somewhat temperature related, but I also see these reset sometimes on disarm or reboot.
- The leans on my GPS-enabled Kakute are ok - I can let it hover and they will sort themselves out. On my non-GPS copter its a pain - there is no reference and the copter slides sidesways
Here’s an example:
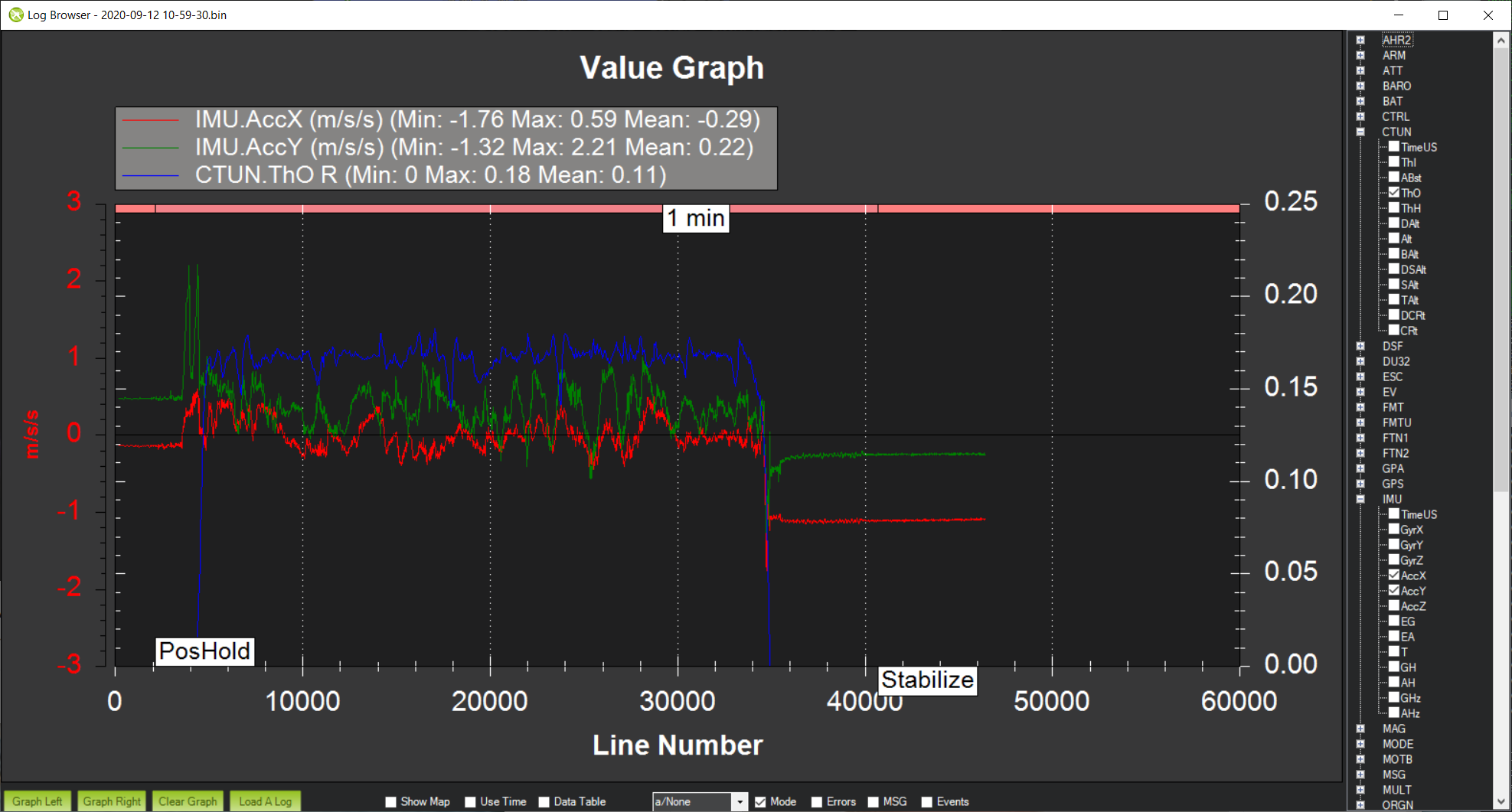
Very interesting! How does ctun.thH follow thO? Have you tested with MOT_HOVER_LEARN set to 0? Not sure if that has anything to do with it though. Wonder why the temperature is increasing so ‘early’. I sort of assumed the main cause was temperature variation with this issue. Could you plot rc2? I am assuming you have the version with ICM20689.
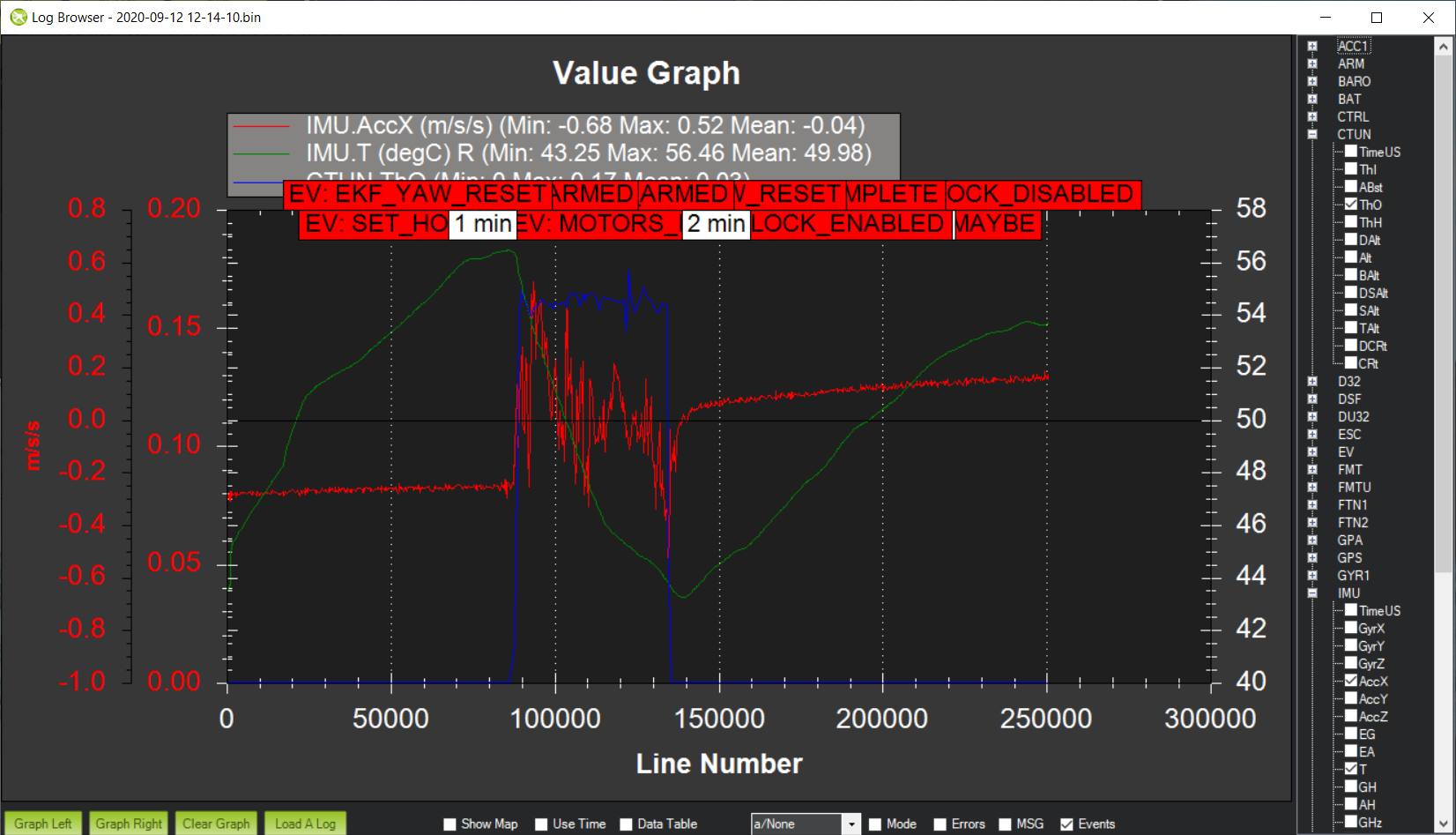
Here is the log https://www.dropbox.com/s/pmo34zjx59dfe5l/2020-09-12%2012-14-10.bin?dl=0
MOT_HOVER_LEARN is already 0.
The temperature rises quickly because the FC and the RunCam board which it is mounted over generate a lot of heat - once the props start spinning this dissipates.
Interesting that in my first flight the offsets start +ve and go -ve, in the second the opposite occurs - this really rules out temperature.
A test I’ve wanted to do, but haven’t had time, is to move the motors off my frame. Somehow still leave the props on so they draw the usual current. But completely remove the source of vibrations. Then power up and see if the same offset develops. That should determine if it might be vibrations or possibly electrical interference.
I was thinking about mounting the motors to a separate X style frame. Just a flat X. Probably directly under my frame, motors upside down so the existing wires should reach. Should be relatively simple to set up.
@wicked1 I think i have narrowed down the problem.I installed latest stable version instead of latest dev version and my leaning issue is gone.Andy is right.Its not the temp and on dev version its the GPS fusion that could be the reason.There is discussion going on github’s issue section.
Can you get a log with IMU and IMU raw enabled and LOG_DISARMED enabled from 4.0.x? I Think this will work if you erase the chip first although there are many flash logging issues in 4.0.x
The reason I ask is that the offset I am seeing above is from the raw IMU data - so independent of EKF. So I’m not convinced that GPS fusion is the only reason here.
Paul tells me you can set EK3_ACC_BIAS_LIM to decrease bias learning in EKF3 - not tried it yet.
Sure i will as soon as i get home tonight.
One thing i noticed in latest dev version is that when my roll was leaning to one side,Level button on the mission planner could’t make it level.Even after pressing the level icon,roll was still leaning.So something is in latest dev version.But i will get you a log soon.Thanks.