I had a copter w/ an omnibus nano. I removed it an installed a kakute f7 mini w/ no other changes.
I’m having a lot of trouble with it.
It leans a lot and gets frequent EKF errors.
It also gets frequent GPS errors which it didn’t before. Some of which doesn’t appear to be valid (like after downloading parameters it will suddenly get GPS and EKF errors)
And it sometimes completely goes ‘crazy’ where the copter trace in MP is jumping around, HUD spinning, etc.
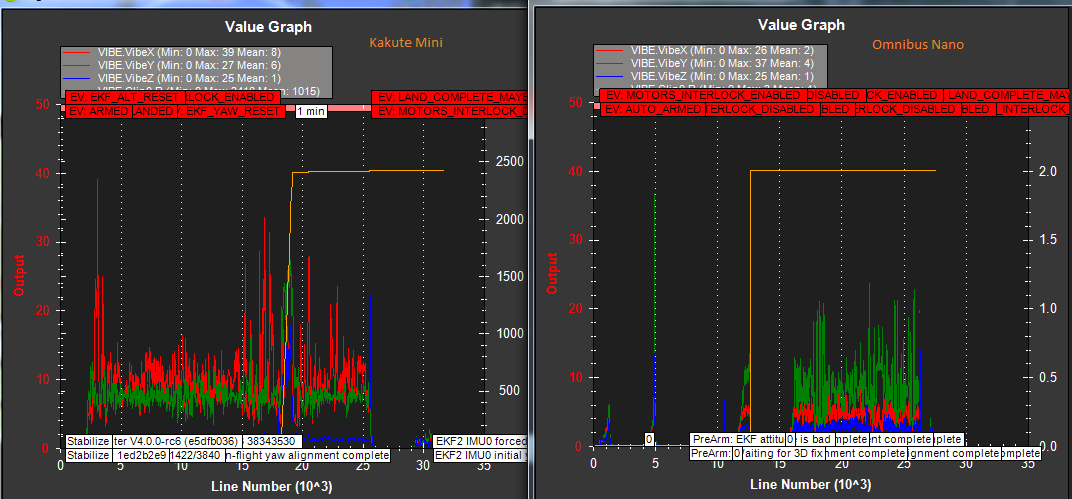
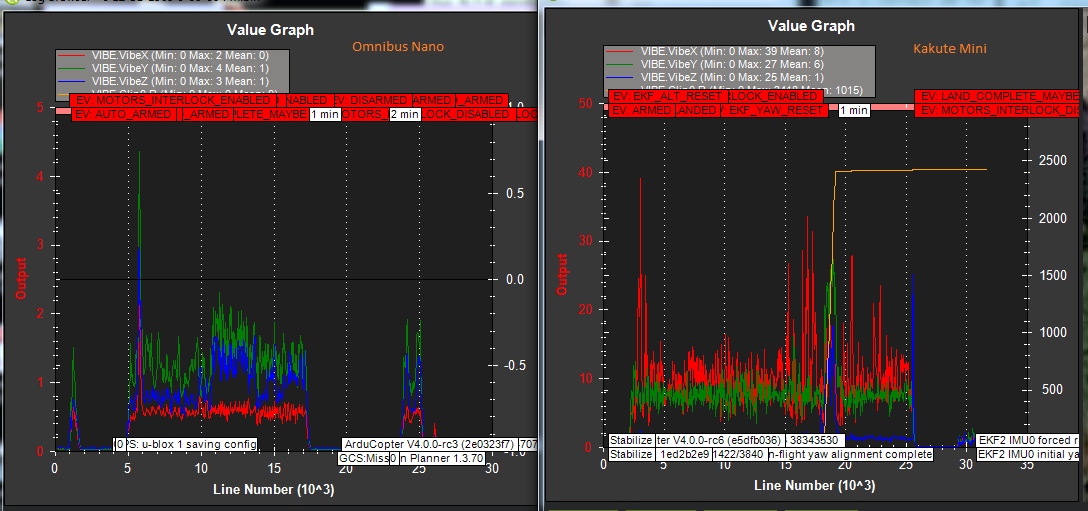
It also appears to be vibrating more… I never had higher than 10-15 in the vibe logs before with the omnibus, and now it’s going up to 30-40. It’s basically hard mounted, with rubber inserts in the holes (m3 to m2 size rubber grommets), but so was the omnibus. I have the filters tuned well, and the post filter FFT is flat. I don’t know if a bad IMU would make it appear to be vibrating more, or if it somehow really is.
My concern is the leaning, and the times where the position trace in MP is jumping around, hud spinning.
I had a flight today w/ the leaning, and then after landing it started jumping around, so I’ll upload that log.
Leaning might be hard to diagnose, because you don’t know exactly when it is happening. I had a short flight around my house and landed in my driveway to wait for GPS signal. It had already started leaning to the left while I was landing on my driveway. It does it frequently during the flight, too, but not sure if you can tell. I guess look for a consistent right roll input from my TX.
And then after landing I turned on log disarmed so you could see the copter going crazy, while in reality it’s sitting stationary on a table.
I started thinking maybe the IMU is bad in this flight controller.
I try not to ping any of the busy set of core developers here, but @rmackay9 said to post a log and he or someone could take a quick look. At least tell me if it’s a bad IMU or if I need to look for other issues.
Thanks a lot!

 I think this is a power issue, as someone said before.
I think this is a power issue, as someone said before.