It’s only marginally better… I’d say not enough to be sure the cap is actually helping.
Still, like my last few flights w/ all my vibration mitigation, I didn’t have any problems. Vibes peak at about 25 instead of 30. Clipping about 30,000 times instead of 90,000. But, looking at all my logs, I think that’s w/in the range I was getting before.
New FC just arrived. I’m thinking it won’t make a difference… But maybe I’ll still try it.
Already finished…
This one is the same… Again, no problems w/ the flight, but about 30,000 clips.
Vibes peak to about 30, average is x=4 y=9 z=2.
No clipping w/ fast sampling off.
I have a 3s battery, but not one this copter can lift… Not sure how much data I could get just on the bench. But now I’ve got the originial FC sitting here, so can do testing w/ it.
As far as this copter goes, I think it’s fine w/ fast sampling off. Maybe it’s fine w/ it on and I can ignore the clipping, but not sure. And otherwise, I’ll probably rebuild it some day and try soft mounting it on gel pads. Not for a while, though… I’ve rebuilt this thing way too many times the past few days :).
I’m happy to do more testing and supply logs, if you think the clipping might be a problem in the code you want to figure out.
Thanks for sharing the information you have gathered from the tests. You know your soldering, wicked1!
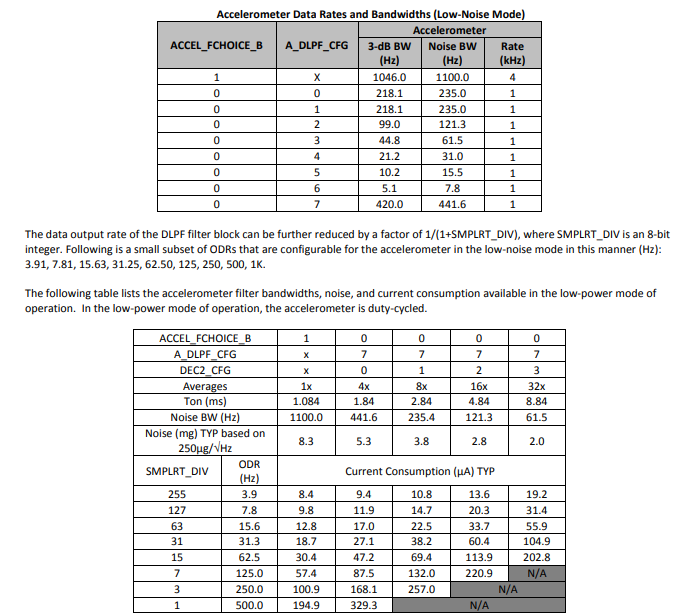
I’ve briefly looked at the backend drivers. It seems as noise increases at the higher filter bandwiths, but I’m not sure if I am interpreting these tables correctly.
The reasoning is the benchmarking you have done against the mpu6000. Gyro noise is similar for the ICM, but accel noise should be significantly lower from looking at the datasheet. I understand from your tests that the EKF handles the accel data well at the lower filter setting. I.e., there should be no reason for the increased noise, even artifacts, with the ICM (with all other variables otherwise the same).
“I think some of this is because for sensors that only support sampling below 32k we can essentially pick the unfiltered option, but for sensors where the unfiltered option is 32k we pick 8k with a lot of filtering rather than 8k with little.”
This would be a good example to test this, with a small copter, (if the board is ok and if this is how the IMU behaves with the current config).
As noted, I have seen little problems with larger copters running the normal sized Kakute F7.
So overall flight performance is similar to the nano?
Yes I agree. @wicked1 I’d be happy to do a build for you that allows you to configure an anti-aliasing filter in software if you want to try. I’m really not convinced these are real vibrations.
Ceitean,
Yes the performance seems the same as the nano.
Andy,
I’d be happy to experiment.
Wouldn’t extra filtering eventually stop the benefits of the faster sample rate? I don’t know the math, so maybe that’s not an issue for the sample rates and filter frequencies we’re using…
Here’s another log… The one I posted at the beginning of this thread was particularly bad. Now I’ve got my better balanced props and secured all my antenna, etc… None of that was necessary w/ the nano… but anyway, it’s much better than it was in my original log.
Interesting, now it doesn’t look like vibes - just high offsets. There is a clear correlation between throttle and offset which makes me still think it’s power related:
Andy, more data related to the kakute mini. Continuing from your notch filter thread. While it’s related to vibrations and filters, it seems a bit off topic for your thread.
I did a basic 1.5 minute hover inside, and the logs look pretty good. Definitely don’t have the vibration issues I do outside in a real flight. Something interesting on the accels…
I’m posting this mostly just for the sake of putting info out there. But if you have any ideas about why my accel pre-filter looks the way it does or how to mitigate it, I’d be happy for any advice.
There are very large peaks that I’m not sure are related to motor noise… Looks like harmonics, so good for the harmonic filter… But not sure if I should target them or the motor noise… (Maybe I need two harmonic filters :)…)
Also, I can see my static notch at about 90hz in the pre-filtered FFT on the gyro. Not sure what’s going on w/ that. If I disable that notch, the peak there is bigger.
Last night I logged disarmed and tapped the frame, and the FFT of tapping it has all the same noise peaks. So this frame really does have some resonance. The 2nd harmonic of the frame resonance is right at the motor noise frequency. There are probably some interactions there…
So, I guess what we are seeing is real noise. It’s noise the mpu6000 couldn’t see, but this ICM20689 can. (or maybe the kakute board has resonance around the same frequencies, so is more susceptible to the noise in this copter) Whatever the reason, I think this copter is ringing like a bell. I can hear it when I tap the frame.
I’ve got a few copters on the same frame, and I can see the same noise peaks on all of them… With the omnibus/mpu6000 the peaks are tiny… They’re pretty substantial w/ the kakute.
I don’t know why it seems to only affect the accel’s… The gyros look similar between the omnibus and kakute, but the accels are a mess in my kakute logs.
Anyway, I guess there’s not a problem w/ anything… I’ve just noticed some differences between the IMU’s. While I’ve been searching for info over the past several days I’ve noticed people in the betaflight forums discuss it frequently. I’ve seen some manufacturers release FC’s with an option for either IMU and in their sales literature says something like “if your copter is too noisy for the icm20689, you can select the mpu6000 option”.
If you do want to try some things, though, let me know. I’m happy to do the testing. This particular copter might be a good test platform if you want to make it work with noisier vehicles…
Cool.
I was going to ask about your frame - I am using an Armattan Gecko 3" frame which is very stiff carbon fibre and I don’t think has much resonance. If you have a softer frame I can believe the problem is worse.
Also I am using these: https://www.quadcopters.co.uk/gemfan-flash-3052-propellers - which are much better from a vibration perspective.
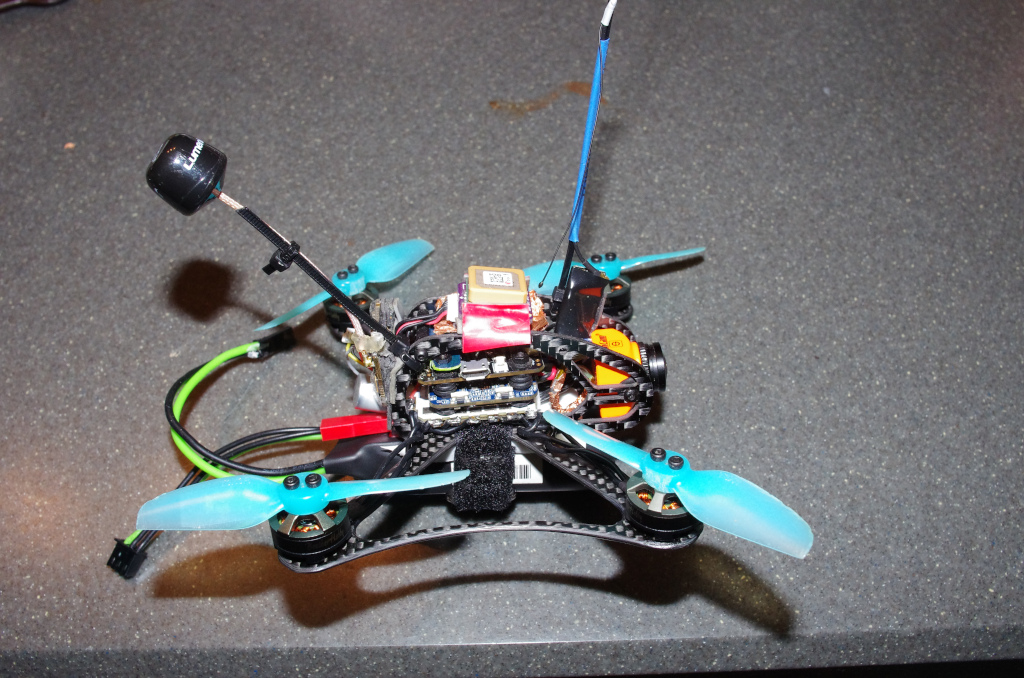
Can you post a picture of your build?
Yeah, it’s a bit of a mess since I’ve been rebuilding it so frequently the past several days.
The frame is ultra light, so is a little flexible. I guess this is the compromise with a light frame…
I’ve been working with two different copters since I have two boards now, but this is the one I’ve been using for 99% of our discussions… (The two are basically the same… Different ESC’s and cameras, but everything else the same. Vibrations look identical between them)
Hello @wicked1, I saw that you reported a reboot (in-flight) in your post #40:
It was’nt really picked up furthermore in this discussion but I also have problems with reboots since I updated to AC 4.0.0 on Kakute F7 Mini. Do you remember the messages that you saw after you reconnected to the flight controller? Was it “PreArm: Internal errors (0x800) - watchdog_reset”?
If you had further reboots like this (and still see them) I would like you to chime in this discussion as well:
Digging up an old thread but wondering if you had solved the problem of leaning towards left?
I got same problem on my kakute F7 mini V2.After sitting on a bench for few minutes,it starts to lean towards left.I mean roll readings start changing.If i level my board when its cold,then after few minutes sitting on the bench,roll changes to 2~2.5 degs without even touching the board.Any ideas please?
Not completely…
The best I’ve got is to fly and then immediately do an accel calibration when you land.
Vibrations definitely seems to affect the issue, so do everything you can to get them as low as possible. Temperature seems to affect it as well, which is why I think the calibration immediately after a flight is good.
My copters still lean, but it’s manageable. If I have a good GPS signal, it’s fine. Flying w/out GPS… I generally keep “save trim” as an option on my transmitter. So if I know I’m going to be doing a lot of flying where I don’t care about GPS, I’ll let it lean. Then trim the lean away and save the trim.
Then when I first take off, the copter pulls to the side I have it trimmed to, but then it develops the lean which in this case, makes it level.
Thanks wicked.Do you know if its software related?I am going to load betaflight on it and see how it behaves.I have already installed heatsink on F745 BGA chip which is helping to keep the board cool.
I am also suspecting that the 3.3v regulator just beside the MPU6000 is also getting hot but not sure if its the heat from F745 chip transferring to the top from bottom of the board?
Hi Andy,
You are right.I installed betaflight and roll on betaflight didn’t move at all even after going from cold to super hot(~48 deg C).
Then i installed INAV and did its all 6 sides accelerometer calibration where the first step is to level the board perfectly and then move on to other 5 sides.But after doing calibration,roll was around 4 degrees off (board was level) even when its cold and roll didn’t change from going cold to hot.It remained ~4 deg off all the time.As there is no level adjustment button on INav’s GUI like ardupilot,i adjusted roll via Inav’s sensor board alignment by entering the offset which was around 4 deg and then it stayed there and didn’t change at all from cold to Hot??
So i don’t know what’s going on?Do you think when we do level adjustment via mission planner after accelerometer calibration,it screws up something.Is AHRS Y trim same as Inav’s sensor board alignment?