I thought you had to reboot after adjusting the accel ofssets
I set this to zero and on the bench no leans - whereas before I was getting leans. Need to try this with a recalibration.
Can you think of any consequences of disabling the learning of offsets?
I guess it can’t try to compensate for temperature drift… What else does the learning of offsets adjust for, when it’s working properly?
Right it’s trying to cope with drift - I see gyro drift on the bench - the problem is, what is worse - not compensating for actual drift or compensating for artificial drift caused by vibrations? Depends on the vibrations which on these small copters are pretty bad.
Unfortunately, no change… None of this. Setting the ek3_acc_bias_lim to zero still leans. Installing your modified firmware still leans.
I never revceived GPS lock on my few flights today, so this is worst case scenario. Would have probably been OK if I had GPS.
 can you post the log?
can you post the log?
@andyp1per Sorry Andy i got stuck with something else last night.I will post the log tonight.
@wicked1 Did you try stable version?
I don’t know… Not sure what is going on w/ this copter… I have had about six flights since I last cleared my logs, but there are only two logs on it. Every flight leaned. I’m just not exactly sure which settings were used on this flight, since I’m not positive which flight this is. (Actually, maybe the logs are just filling the flash and overwriting… I’m not used to your changes yet… I’m used to everything going corrupt when the flash fills)
It doesn’t lean all the time. Usually the lean isn’t bad. A couple times it gets bad for a brief period… 45 degrees. I wish I had a way to show you when the lean is happening, in relation to the log. If it would help, I can probably figure that out in a future flight, and be able to tell you exactly the times a bad lean is happening.
This copter is acting very strange though. I’m having compass issues today. Yesterday I flew 3 packs, and no problems. My 2nd flight today, compass variance and bad health. It did it even after rebooting. Heading was almost 180 degrees off. So I recalibrated and it was fine for a couple flights. Then it did it again, and I had to recalibrate again (basically back to the original calibration), and it was OK for a few more flights, where I stopped for the day.
GPS was bouncing between 8 sats and 0 sats very quickly several times.
I know you’ve mentioned power issues w/ yours, and maybe that could explain the above issues. I don’t have anything major powered off it (just GPS and RC RX), but maybe I should try powering everything from an external 5v reg. (I think this is why I went back to flying my older omnibus copters w/ older cameras, etc… They just work… Minor lean, but no other issues) (-I unfortunately don’t have a kakute v2 to know if it’s any better… Both of mine are v1)
Here’s a log, but not sure how useful it is.
https://drive.google.com/file/d/1ADFjb2o1c4J4Ua4HASpGsFq9gw9jKuMj/view?usp=sharing
Ninja, no… Haven’t flown stable in a while. But I definitely had this issue on stable, too.
@wicked1 I was having same issues on latest dev version as you mentioned and none of then were consistent.Yaw was moving.having compass variance and bad health. Some flights were totally fine and some were bad.I suspect it has something to do with the GPS reception.But after switching to Stable,it looks like all problems are solved.
OK thanks. I will definitely try it.
I know some of the things I’m trying which I don’t think are in stable yet could be adding a load to the CPU, which might be causing some of the strange issues. I don’t know. I’ll look in to it.
Your MAG innovations are huge. Here is a flight of mine from yesterday going pretty hard:
Yours are up to 10 times that. Have you done a motor compensation calibration? You should - it fixed the MAG issues I was having.
How close is the MAG to the battery lead end of the battery?
Note that without GPS the MAG is the only level reference the flight controller has, so if yours is bad that’s not going to help.
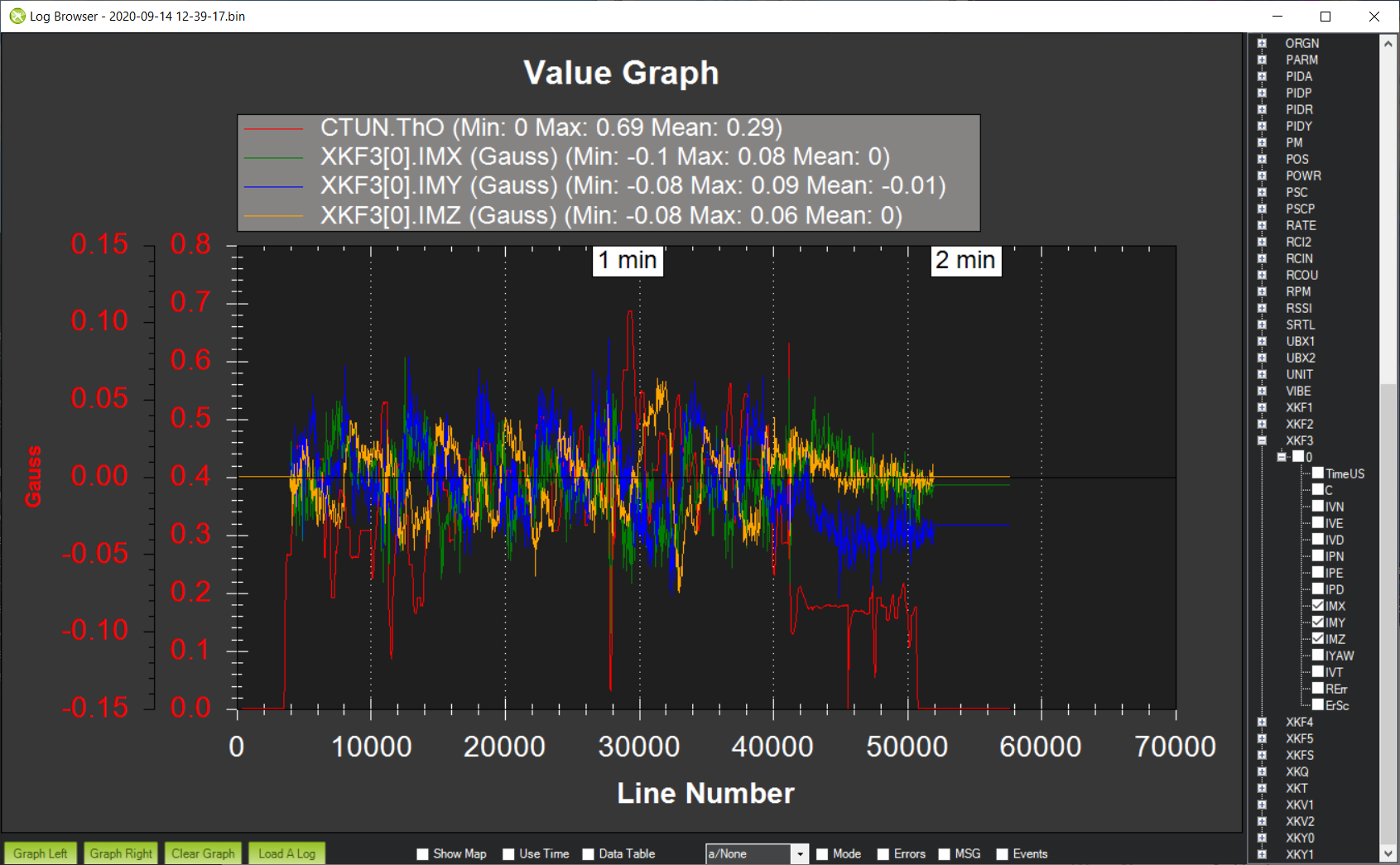
Flying with LIM=0 yesterday the results were pretty good:
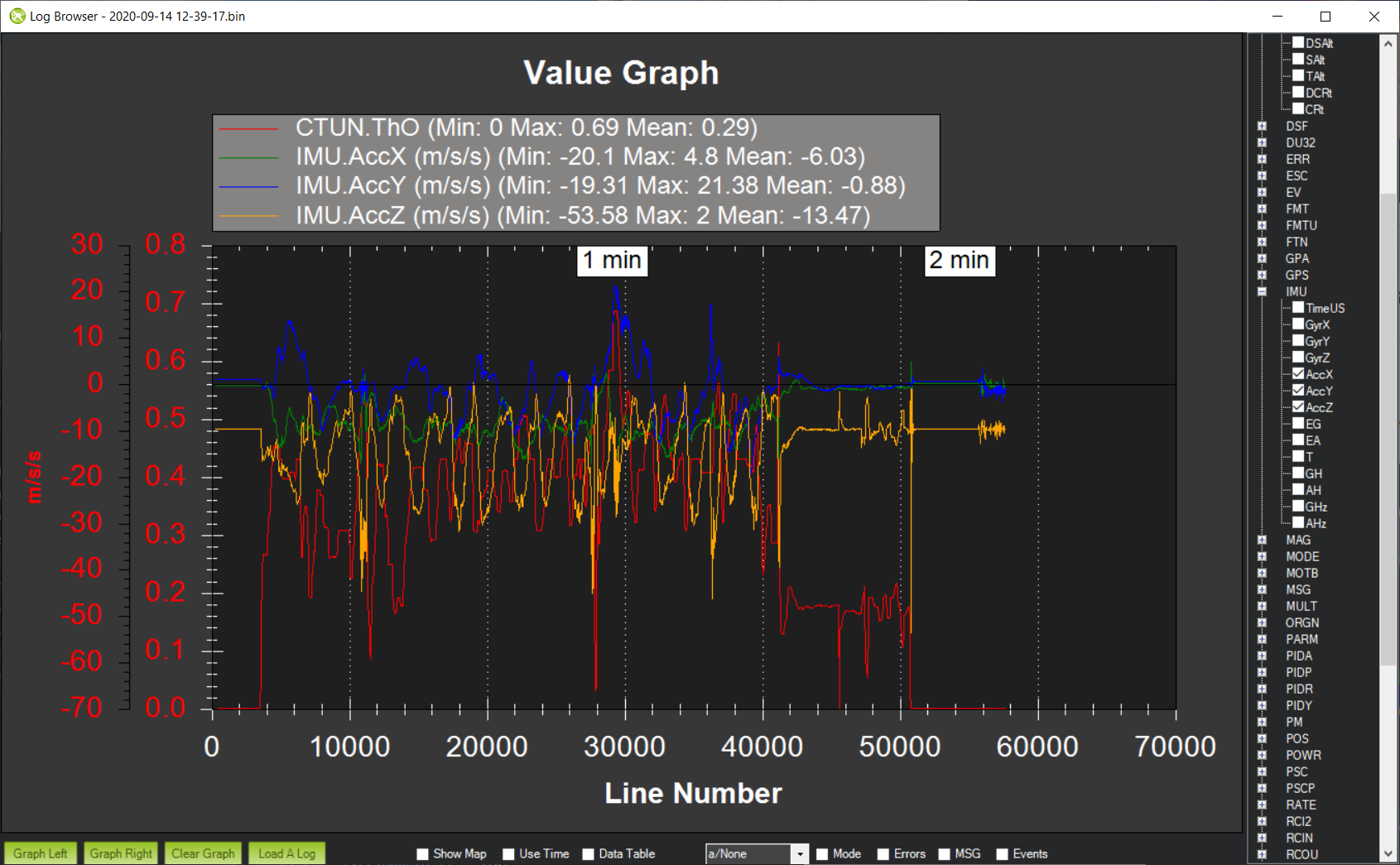
Accels before and after pretty consistent, with a slight offset before due to the controller warming up
Yeah, my magnetometer was going crazy today. Not sure what was up. Usually it’s not so bad.
And like I said, it went 180 degrees off… Until I recalibrated. Then it was fine a couple flights. Then it was 180 off again until I went back to basically the original settings. I can’t think of anything that would cause that to happen.
Mag is on the top of the copter. Battery wires are on the bottom side. In the frame of a 3" prop copter, they’re pretty far apart, but that’s only a couple inches.
In the past, doing a compass motor calibration made things worse… But that was probably on my omnibus copter w/out current sensor. I’ll try it on the kakute. I just think I have something else going on… I had zero mag issues yesterday, and today, every flight I was getting errors. No physical changes to the copter.
Mine is a couple of inches away as well - but its close enough for a decent amount of interference
@wicked1 You can also check if Electric current is effection you mag or not by securing your quad on the ground with flipped props and give a full throttle and watch if your heading moves.
Oh wait, I did make a physical change to the copter.
I changed the battery connector from JST to xt-30! Wow, wouldn’t have expected that to change things so much.
Also make sure you do the calibration with the flight battery connected
I wasn’t able to do a motor compensation for a long time because I couldn’t connect a cable without it interfering with the props. In the end I cut down some old 3" to 2" and that did the trick.
… and this made a big difference, I was getting all sorts of EKF_VARIANCE errors before, now all gone.
… also I set EKx_MAG_CAL = 2 to stop interference being learned by the EKF
2 Likes
Yes as you said i found it works better with flight battery connected without USB wire and using the Transmitter (throttle up and right yaw).In that way you can freely rotate the quad.
Have you tried the in flight compass calibration?
That’s what I have been using… Which I have mixed results with. It’s basically calibrating with some motor interference, so is great while flying the same way. But sometimes on the ground the heading will appear to rotate I guess due to the lack of interference.
Well, charging up a couple more packs now. I’ll add a spacer to raise the GPS up at least another 1/2 inch. Then do a compass calibration. compass/mot. And see how it goes.
No I haven’t tried in-flight calibration yet.Will look into it.Thanks.