Would all the standard hardware from pixhawk kit work? Buzzer, LED, telemetry, safety switch? Does it have a safety switch connection even?
This will let you see what all can be done with this board. No safety switch port and all the cables would need to be soldered to the board. https://github.com/ArduPilot/ardupilot/tree/master/libraries/AP_HAL_ChibiOS/hwdef/KakuteF7
Soldering is not a problem, thanks.
Has anyone solver BLHeli pass-through for this board?
There is no problem with BLHeli32 ESC’s. At least the 4in1 I’m using works fine.
I have mounted blheli_s. Superc regulators operate in f7 kakute in d-shot 600 and in hexa pixhawk I have blHeli for d-shot 300. I am now looking for blHeli _32 which will also work. In kakute f7 I installed ublox m8n with magnetometer and everything works beautifully. As far as you write which frame and motors you want to use, I will send you starting pids and other settings.if you want to start the setup for betaflight, I can also send.
Most regulators work without any settings. But you can upload the firmware of betaflight and use Blheli / s / 32 configurator to set something up in your ESC
For Kakute F7 afficionado’s, here is my build:
I’m building an alien h4 680mm quad with rctimer 5010 530kv motors and 1555 props, 4S battery, hakrc blheli_32 35A escs… Should be fun.
What mass should your copter have? Using engines with such a low Kv, the frequency of gyroscope filters and accelerometers must be very low. I use motors with kv 900-100 for a quad with a mass of 1kg and a low-pass filter I must have at about 50 hz.
About 1.5-2 kg I think.
Anton, been there, done that. Don’t know what 2019 bearings in the 5010’s look like, but back in 2015-ish they were apalling. Most of my RcTimer 5010’s ended up with new bearings after just a handful of flights.
Camera shaking was pretty low-frequency, given sthe prop size and low voltage. Intermittent jello that was hard to damp against. Switching to 360 kV 5010’s on 6S, with the same 1555 props and some silicone-rubber PC hard-drive grommets made the jello way more manageable., but I didn’t have fast-firing MOSFETs back then and BlHeli32 logic to help.
All things considered, I don’t think you’ll have a hard time tuning and flying it.
I had these 5010-530 motors on a previous quad a couple of years ago, they were ok.
6S would be good but I think HakRC ESCs can handle 5S max…
I just received my Kakute F7 AIO and I found soon a problem with current sensor, it always shows the same value of 0.39 Ah. I tried also Betaflight and the problem is the same, giving gas the current value doesn’t increase. I’m not the first with this problem, do you know a possible solution?
I take it SD card logging still does not work? I run 3.7.0-dev.
Also, my quad (680mm H4) seems a bit too twitchy with default PIDs and running Autotune made it increase oscillations and spiral into the ground. Reducing rate P to 0.08 and Stab P to 3.5 (from default 4.5) did not help much. Any suggestions on what should I look at next? I was lucky to crash-land into the grass a few times but I’d like to stop that.
SD card issue solved by flashing today’s version of firmware.
hi, i would try to exchange the unit. i have 3 models on the AIO controller and on all of them current sensor works fine.
if it helps - here is a batt_monitor params from it.
| BATT_AMP_OFFSET | 0 | V | Voltage offset at zero current on current sensor | |
|---|---|---|---|---|
| BATT_AMP_PERVLT | 31.3 | A/V | Number of amps that a 1V reading on the current sensor corresponds to. With a Pixhawk using the 3DR Power brick this should be set to 17. For the Pixhawk with the 3DR 4in1 ESC this should be 17. | |
| BATT_ARM_MAH | 0 | mAh | Battery capacity remaining which is required to arm the aircraft. Set to 0 to allow arming at any capacity. Note that execept for smart batteries rebooting the vehicle will always reset the remaining capacity estimate, which can lead to this check not providing sufficent protection, it is recommended to always use this in conjunction with the @ | |
| BATT_ARM_VOLT | 0 | V | Battery voltage level which is required to arm the aircraft. Set to 0 to allow arming at any voltage. | |
| BATT_CAPACITY | 1500 | mAh | Capacity of the battery in mAh when full | |
| BATT_CRT_MAH | 0 | mAh | Battery capacity at which the critical battery failsafe is triggered. Set to 0 to disable battery remaining failsafe. If the battery capacity drops below this level the vehicle will perform the failsafe specified by the @ | |
| BATT_CRT_VOLT | 14 | V | Battery voltage that triggers a critical battery failsafe. Set to 0 to disable. If the battery voltage drops below this voltage continuously for more then the period specified by the @ | |
| BATT_CURR_PIN | 12 | -1:Disabled 3:Pixhawk/Pixracer/Navio2/Pixhawk2_PM1 14:Pixhawk2_PM2 101:PX4-v1 | Sets the analog input pin that should be used for current monitoring. | |
| BATT_FS_CRT_ACT | 2 | 0:None 1:Land 2:RTL 3:SmartRTL or RTL 4:SmartRTL or Land 5:Terminate | What action the vehicle should perform if it hits a critical battery failsafe | |
| BATT_FS_LOW_ACT | 2 | 0:None 1:Land 2:RTL 3:SmartRTL or RTL 4:SmartRTL or Land 5:Terminate | What action the vehicle should perform if it hits a low battery failsafe | |
| BATT_FS_VOLTSRC | 0 | 0:Raw Voltage 1:Sag Compensated Voltage | Voltage type used for detection of low voltage event | |
| BATT_LOW_MAH | 0 | mAh | Battery capacity at which the low battery failsafe is triggered. Set to 0 to disable battery remaining failsafe. If the battery capacity drops below this level the vehicle will perform the failsafe specified by the @ | |
| BATT_LOW_TIMER | 10 | s | 0 120 | This is the timeout in seconds before a low voltage event will be triggered. For aircraft with low C batteries it may be necessary to raise this in order to cope with low voltage on long takeoffs. A value of zero disables low voltage errors. |
| BATT_LOW_VOLT | 14.2 | V | Battery voltage that triggers a low battery failsafe. Set to 0 to disable. If the battery voltage drops below this voltage continuously for more then the period specified by the @ | |
| BATT_MONITOR | 4 | 0:Disabled 3:Analog Voltage Only 4:Analog Voltage and Current 5:Solo 6:Bebop 7:SMBus-Maxell 8:UAVCAN-BatteryInfo 9:BLHeli ESC 10:SumOfFollowing | Controls enabling monitoring of the battery’s voltage and current | |
| BATT_SERIAL_NUM | -1 | Battery serial number, automatically filled in for SMBus batteries, otherwise will be -1. With UAVCAN it is the battery_id. | ||
| BATT_VOLT_MULT | 10.95432 | Used to convert the voltage of the voltage sensing pin (@ | ||
| BATT_VOLT_PIN | 13 | -1:Disabled 2:Pixhawk/Pixracer/Navio2/Pixhawk2_PM1 13:Pixhawk2_PM2 100:PX4-v1 | Sets the analog input pin that should be used for voltage monitoring. |
hi, try to check this param file and try setting same filters frequencies or simply try it as is, as it is from a simlar craft, only motors are 920kv.
https://drive.google.com/file/d/1IHDlPFdQk0ZTU4eCJL0HLX_MoAu62ZSu/view?usp=sharing
btw, i second the 360 kV on 6S advice.
Thanks for that. That’s quite strong PIDs you have here… I wandered if my quad overcompensates but maybe not… I’ll try something similar.
I agree on 360kV+6S but as I mentioned before my ESCs are rated to 5S only 
With the current setup I hover at around 40% throttle with a brick of a 10Ah battery.
Any log gurus here? I just don’t understand why it crashes EVERY. TIME.???
As soon as I turn Autotune on, it just increases oscillations and eventually does a weird spin/flip (like following an inside of an inverted cone) and crashes.
https://drive.google.com/open?id=1fHxhvTTtU64GR-ExLVhl_gb4-KQJRZ8U
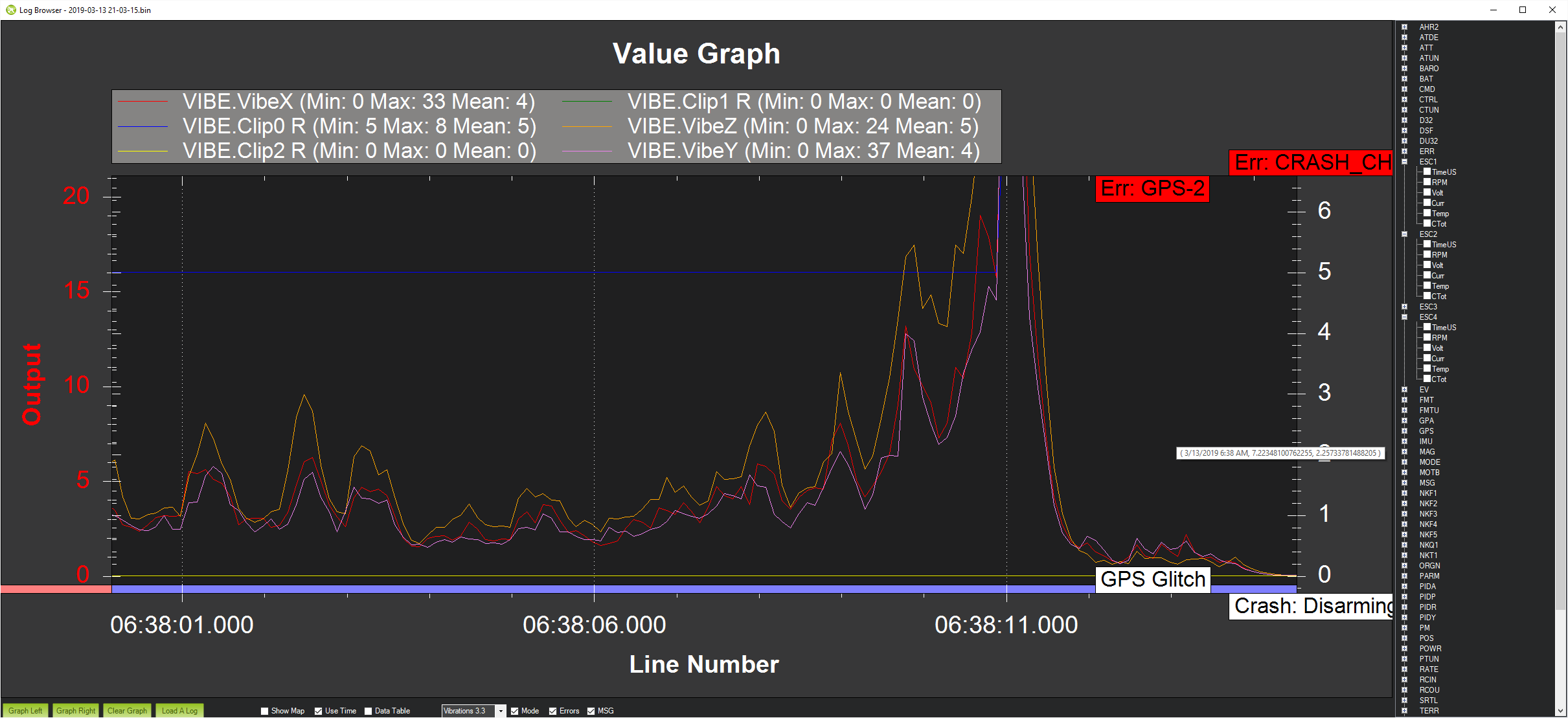
here is your vibrations, screenshot.
the ESC data shows rpm drop at 06:38:10.11 - that was the crash, i would guess. prior to that vibrations escalate.
how do you have Fc mounted? is it sitting on rubber grommets? are props balanced?
and, is that all happening with my entire params file loaded, or with something else?
you may try setting autotune_aggr to 0.050 and setting roll and pitch filters to 20… dunno. vibrations should not have been getting that high.