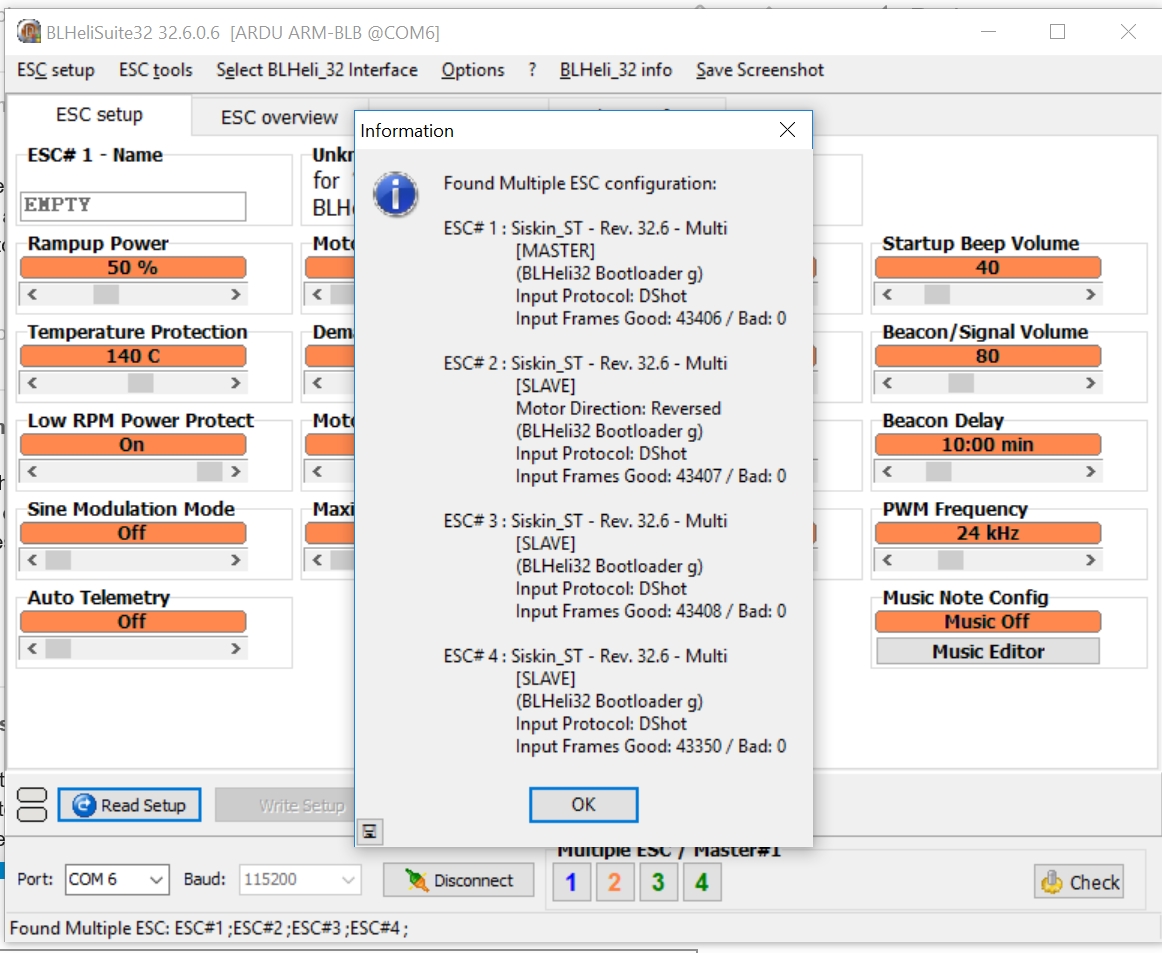
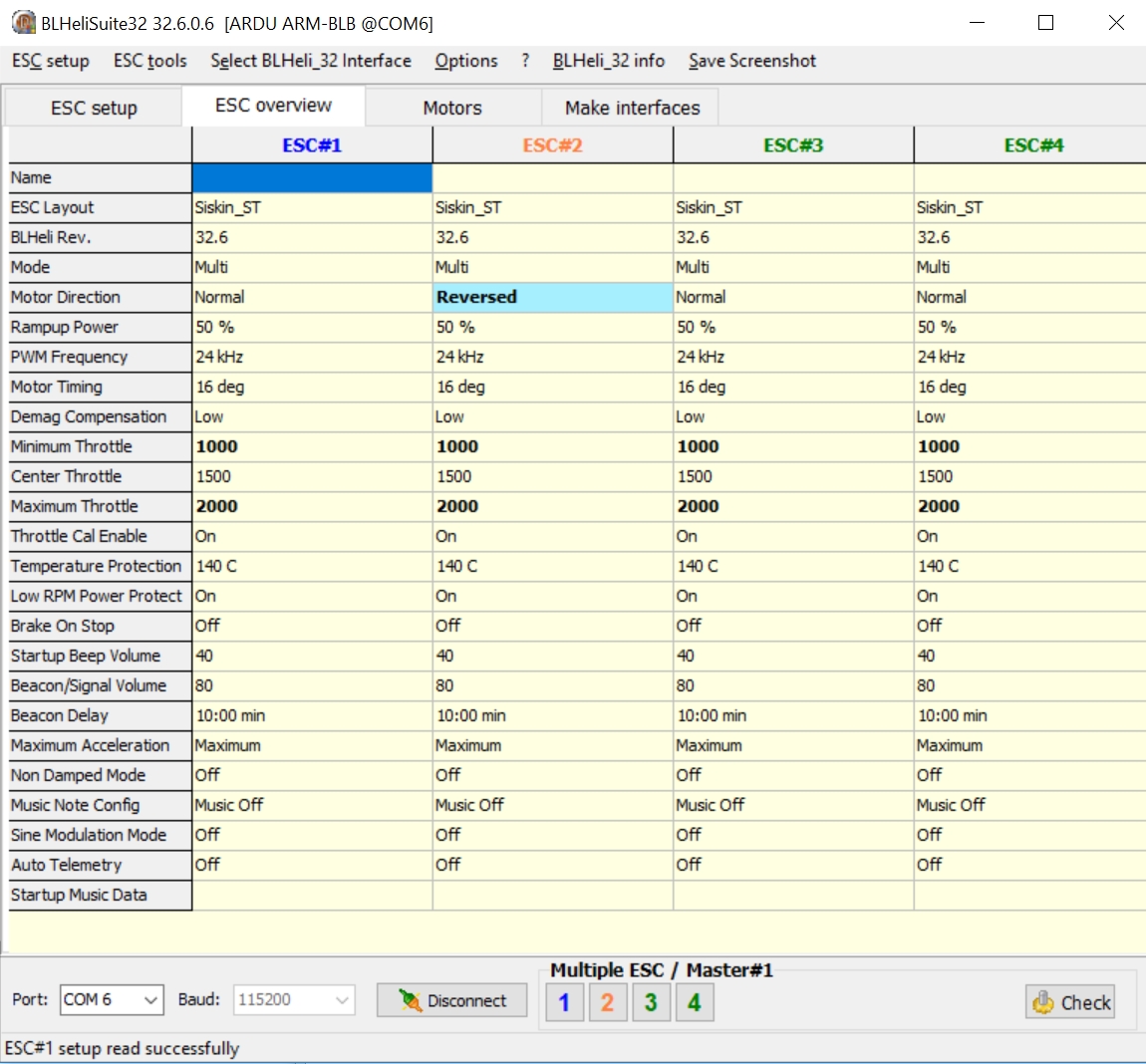
So when you make a direction change in BLHeli suite and Write Setup and then test it in the suite motor tab it does change direction or not? Post a screen shot of the “ESC overview” page maybe there is something of interest to see there.
Kakute F7 doesn’t have a can port. It may be possible in the future to assign a uart, with an external uart<->can adapter, but not at the moment.
Something like the mRo X2.1 is probably the best bet for a cheap(ish) canbus enabled board.
The anyfcf7 looked the goods on paper, but I can’t get it’s can port to work.
Mr. Pattinson—
Thank you for confirming what I suspected.
Yes Dave, that is what I observe. here a screenshot of the ESC Overview. By the way, the motor direction changes when I swap physically two wires. So I suspect the Ardupilot passthrough for BlHeli is the source of the problem.
That is strange. I use the BLHelisuite motor tab to set direction of motors and Ardupilot has always produced the same direction.
Same here. I just wire the connection directly in a row because of this.
Yes. I’m not a fan of bullet connectors. Solder em-up! What’s odd here is the direction is written to the ESC and it shouldn’t matter what the source of the PWM signal is. I’m mystified as to how the ESC direction can be changed and confirmed in BLHelisuite but some other source (Ardupilot, Betaflight, Rx direct, etc) is different.
wait, you were able to get BLHeli passthrough working? Care to share the black magic? I have yet to get that working and I have a Kakute F7 (non-AIO) with the Tekko32 4-in-1.
My Kakute F7 is on a Plane w/o a BLHeli capable ESC but I have had no problem with Passthrough on a Omnibus F4 Nano (Ori32 ESC) or a PixRacer (Spedix ESC) just by setting the SERVO_BLH_AUTO to 1. Did you try to set the BLH bitmask also? I haven’t needed to but I have seen posts from others that have.
Tried it w/ and w/o the mask. I’ll try again.
Not as convenient I know but before Ardupilot passthrough was available I used a cheap Naze32 board for ESC configuration purposes only. Betaflight passthrough always worked.
Yep. Me too; a Flip32.
I ended up swapping two wires (resoldering of course required) and that solved my issue of getting the correct motor direction. It could be a bug with the specific ESC model I’m using but it’s weird. I have another 4-in-1 ESC (Holybro Tekko 32) that I did not try yet but I have only one KakuteF7 that is now burried in my 3"frame, so I’ll pass on testing another ESC for now.
Check this out for BlHeli Passthough http://ardupilot.org/copter/docs/common-dshot.html?highlight=blheli
Way ahead ya brother. Been up and down that page many time. However, is do have ESC telemetry for voltage and current. So at least I have that.
Sorry for hijacking the thread… I’m building a quad and was offered a present for upcoming birthday. I’m thinking about Kakute F7. Is it worth it (over Pix2.4.8)? Would I be able to use it with BLHeli32 ESCs in DShot and pass-through?
Don’t think about it
Just buy it!!!
I be build a quad with kakute F7 Aio
Very easy to build very easy to program
Just solder , upload the firm , do the calibrations and fly
I built a quad on kakute f7 f500 talon frame. I am playing with it mainly on betaflight. When I loaded the arducopter I found it perfect for a d-shot. I have esc blhelis. It worked to set the main loop frequency to 1.2khz what on pixhawk 2.48 is not possible. I have a ublox m8n gps with a magnetometer and the Quad keeps the position better than the Phantoms. It’s definitely worth it. in two minutes I can have betaflight back. Do not meme any problem back to another firmware. I play the firmware always by betaflight.
Thanks cookmange, MarcK. You have convinced me :). If I have any troubles with it though, you’ll know who I’ll haunt… 
You will not have much trouble. I advise sticking on the gyroscope / accelerometer which is on the foam of a heavy nut - this will reduce the vibra- tions, The greater mass of the chip will cause less penetration of vibrations. install the driver on an anti-vibration bed .I help in case of problems