I had reached out to jumper hoping to have the same luck you did, but no dice. My FC is still dead and I can’t figure out how to get it to connect to anything and now they are ignoring me.
So garbage customer service, and garbage electronics. Landing (not crashing) in a tree shouldn’t kill your flight controller, but I guess it kills these.
I eventually went with the F405 Vtol board from Matek with the Foxeer gps 19 sats indoors… with full compass. And half the price of the matek… foxeer t-rex camera with a downward facing caddx and lite imbedded in the rear, no ppont have two camera channels and not using them… waiting on rush tank to be delivered so slumming it with a The Fpv Chaos vtx from unmannedtech in the uk and a set of hollybro v3 telemetry radios.
Just need to tune the shakes out of it now… pefect balance with the 2200 4s and fine on 4s 21700 pack with an insta360 in the front.
Now could someone please turn the blooming wind down a bit…
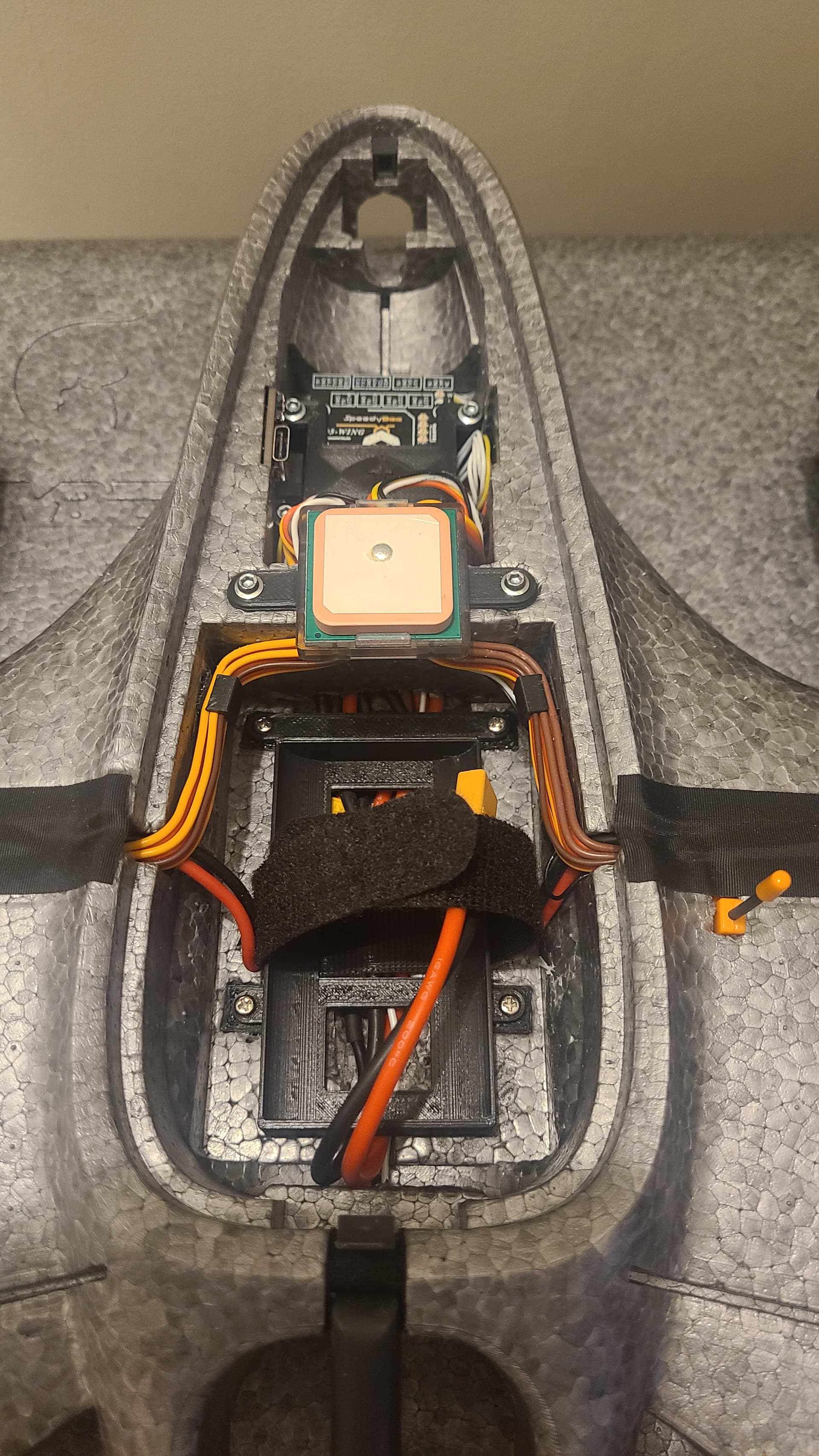
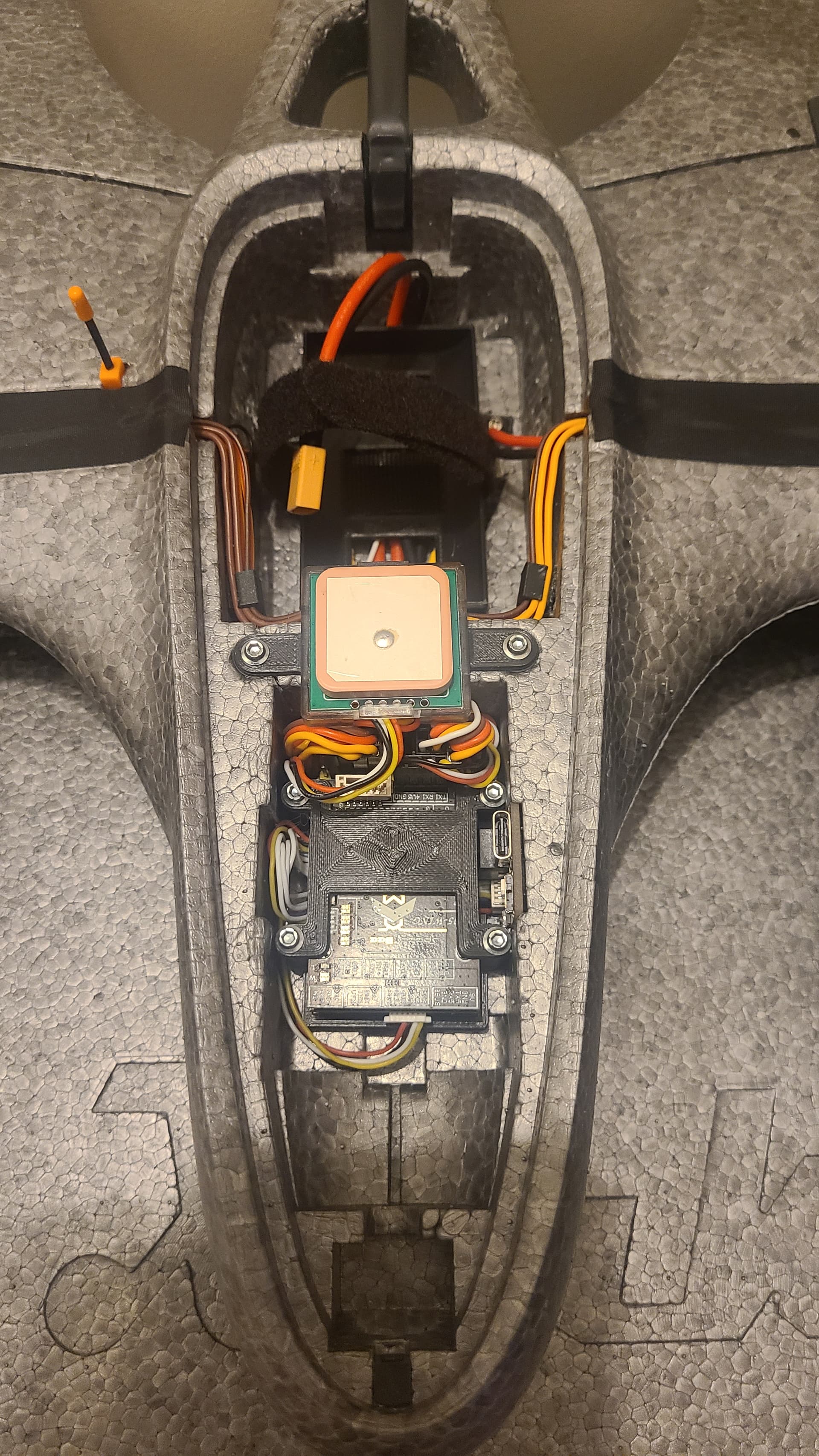
Update to my earlier post and I have taken the same route as @Samantha_Collins with the exception that I went with the SpeedyBeeF405.
So FC’s were purchased and after a few 3d printed bits and bobs I have it fitted to my liking. New 100mm extension leads fitted to remove any additional connections and all 3 motors wired directly to the FC ensuring none of the Jumper internals remain.
This is my first Arduplane attempt having only really used INAV previously so bit of a steep learning curve ahead but after 2 nights I have the fundamentals of VTOL all setup just needing a final check and we should be ready for a test.
Hopefully this weekend may see it take to the sky, fingers crossed, and will report back.
Hi I’m fitting a matek h743 wing with matek h10 gps and compass
… My flight controller died so I have nothing to go on… So far I’ve flashed ardupilot fitted the gps and compass. Calibrated the compass… Gps and compass work… Done the radio calibration. Got the modes to work qstabilised fbwa… And rth on a three posit ion switch… The motors arm… I’ve been following painless video on the t1 ranger as a guide… But that has a tail and is not a wing. So I’m unsure on how to make the elevators etc work.
Plus the motors only tilt for transition and do not move when you yaw… Any help appreciated
The best way would be to use the crafts default parameter file posted in this thread and either using Mission Planners parameter compare function or a Text Editor compare function and make the changes manually.
Good idea thanks… I almost ordered a heewing t1 vtol pnp with flight controller today… But I thought I really need to get this xiake 800 to work… I’ve got all the parts… The rear motor esc only has a signal wire but the two front motor have signal and ground… I haven’t tried the rear motor yet… Bit of a mission soldering the three ground wires and 3 positive wires to the board lol… And all of the servo extensions like spaghetti junction… Think ill put my gps and compass in the wing when I’ve got everything working properly
Hi thanks for the link my flight controller has died trying to replace it with a matek h743 wing.
. I can’t seem to open your file… I need the parameters so I’ve got something to compare against. Thanks
UPDATE: so managed to get mine in a hover, climbed up and try to transition and it started to move forward a little but then started to flip almost. Managed to get it back by switching back into QSTAB and landed it no problems.
On bench testing again it gets part way into the transition with front motors ate 45 degrees and rear motor still running but never actually transitions fully.
I think there’s a transition speed setting which it needs to hit for it to fully transition. When I do it with props off and then move the model quickly it transitions fully.
So looks like I need to decrease a setting so it transitions quicker, or make the transition a timed event as opposed to needing to sense/estimate speed from the GPS
Any suggestions as I have already imported all the Q_ elements of config from the original FC config which did work once for me.
Mine is doing the exact same thing. Transitions to 45° then shits off the two front motors…
I would be very eager to find out what needs to be changed to get this to transition properly. I dont have the same with my T1 and i have set them both up from scratch.