What do we know about the flight controller in this new VTOL that runs Arduplane? I see mention of it for the Dev call.
looks like its a F405 based one looking at the hwdef file @tridge churched up for jumper. He has one was just waiting on a calm day to fly he said. interesting little machine for a decent price point for a tri vtol. Painless360 did a video but was a bit off put by the lack of docs that come with it. Sub $200 RTF VTOL?! Jumper XIAKE800: First look and an elephant in the room we need to talk about... - YouTube
hwdef: added Jumper Xiake 800 by tridge · Pull Request #22245 · ArduPilot/ardupilot · GitHub
OK, thanks. Yea, another F405. I guess you can’t complain for the price of this craft. Bring a lot of people to VTOL probably.
yes agree it will let a lot of folks play with what use to have to be a complete custom build. would be fun to have as a beta tester for vtol firmware. I tend to like the tri more than quad just less weight not doing much most of the time but you lose a bit of redundancy with not having the complete quad to fall back on.
I saw that painless video. It got my attention. Then went down the rabbit hole of the 3D printed version…
1 Like
I watched 3 videos and I was getting annoyed that they didn’t connect it to Mission Planner and see what’s in there! It’s the 1st thing I would do.
1 Like
haha, yeah, I would do the same.
get ready for an influx of questions!! hahaha, painless will do it proper once he gets some docs from them I imagine
hi everyone, as you may have seen, I have a PR for this plane.
Unfortunately when I went to fly it today I found it kept resetting when on battery power. If I plug in USB (with or without battery) it’s fine, but with just a 4S battery is resets every 30s or so, like it is browning out. It does the same regardless of whether I have the original factory firmware or my new firmware installed.
Has anyone else powered theirs on? Any reset issues?
1 Like
for anyone that wants it, here is the original factory firmware as an apj file, extracted from my plane
That allows you to go back to factory fw if you install my fw
factory-fw.apj (827.3 KB)
it seems to be a servo issue, if I set BRD_SAFETY_DFLT=1 then the reboot happens when I turn the safety off, thus giving signal to the servos.
When I have USB connected the servos can move, but they stutter very badly
This is what it looks like on the Saleae:
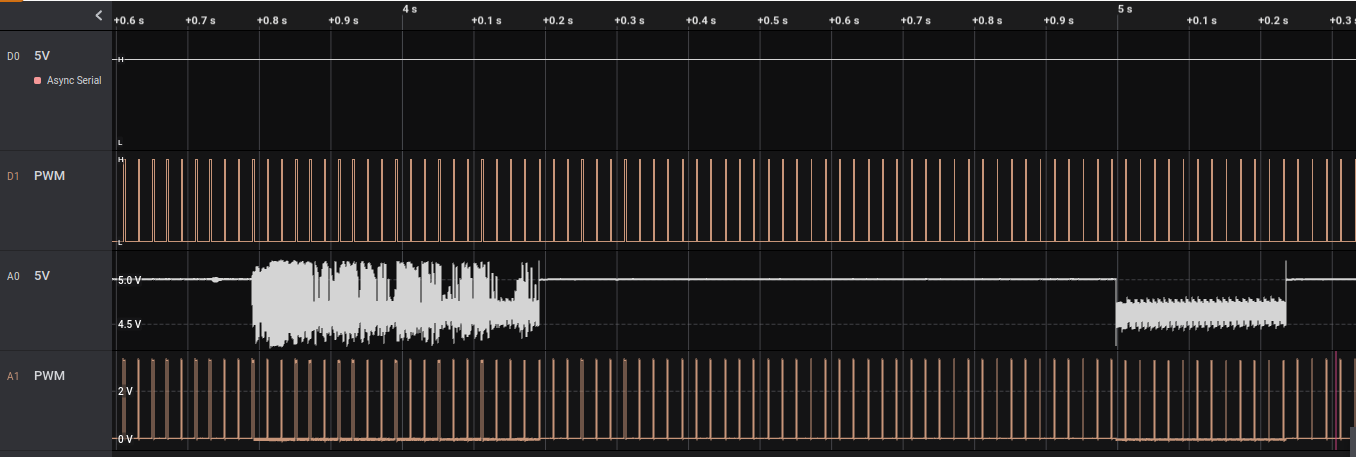
really ugly signal and power …
the problem seems to be that it uses the same BEC (which is incorporated into the bottom of the battery tray) for both the F4 MCU and the servos. The tilt servo mechanism is quite stiff, and when the servos need to tilt the BEC can’t maintain sufficient voltage to keep the MCU alive. It does work sometimes, and the flight logs on my plane show that it was tested before shipping, but it is just not reliable.
If I manually move the tilts I can feel an enormous amount of resistance, and the Saleae trace shows the 5V rail changes a lot when it tries to tilt:
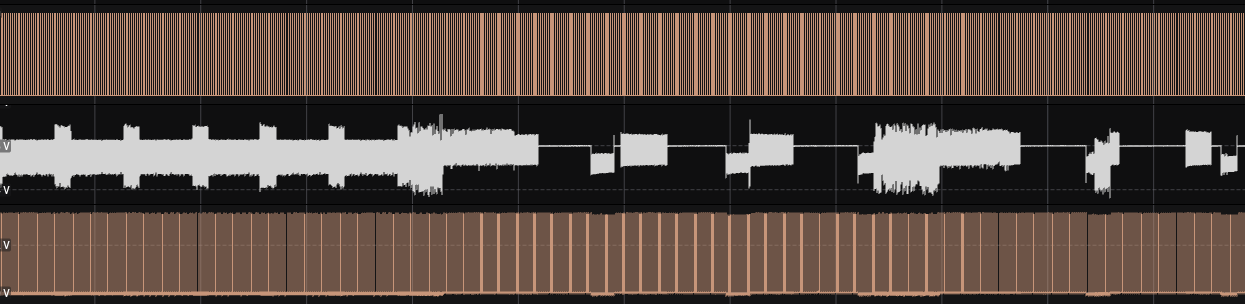
it really needs a separate BEC for the servos so we don’t brown out the MCU.
It could be that my plane is particularly bad. If that is the case then it would be good if someone else can test fly the PR I have done. I can’t fly as it will just reboot as soon as it tries to tilt the motors as the MCU browns out.
2 Likes
mine does not reset, but very sloppy delayed yaw control
Mine doesn’t do that at the bench even under load & with an air unit attached…
Mine also does not brown out but the adjustable eyelets in the linkages have some slop so the motors can move slightly if i move them back and forth. This probably does not help in q modes, the control isn’t great (not tried autotune yet)
it sounds like at least some people have planes that are flyable. I’ve put a test firmware here:
http://uav.tridgell.net/JumperXiake800/
I can’t fly mine, but if someone else could fly theirs and give me a log that would be appreciated. A comparison log from the original firmware would be good too.
I’ve put an apj of the factory firmware in the same folder to make it easy to switch between them.
4 Likes
Hello, Tridge! I am from the Jumper RC team. Very nice to meet you! It sounds like a servo failure.
1 Like
Here is a wetransfer link that contains two test logs. Factory fw and your fw log.
WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
https://imgur.com/cdGI9Ne Here you can see the weather conditions during the testing.
Please, do send me your full address to marketing@jumper-rc.com and let us send a replacement servo your way!
Kind regards!
3 Likes
@tinyspot thanks! I’ll have a look at the logs in more detail in the morning, but the good news is I can already see that the ESC RPM is working:
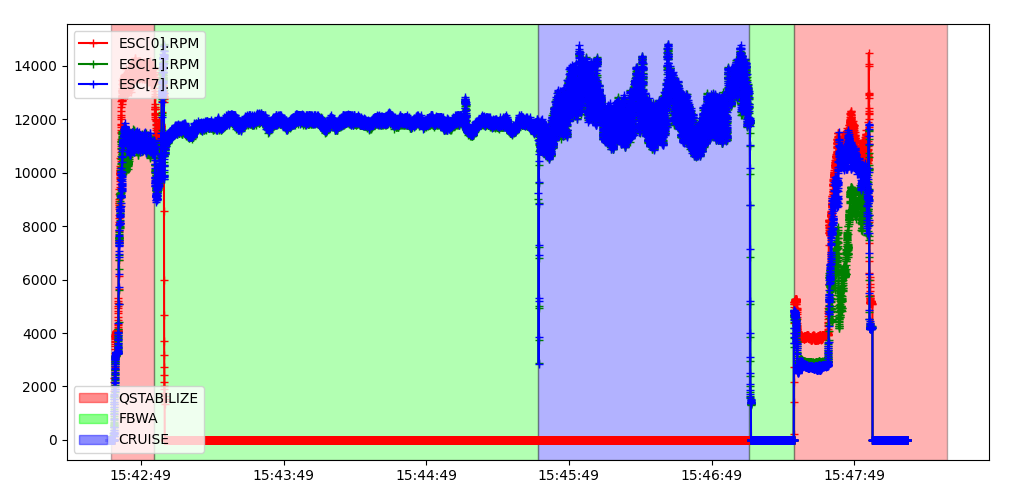
We should be able to use this RPM to give a better tune
4 Likes
I received one of these a few days ago.
I managed to get the flight controller removed from the aircraft. Here is a photo of the top of the PCB.

Here’s a photo of the bottom of the PCB and the enclosure.
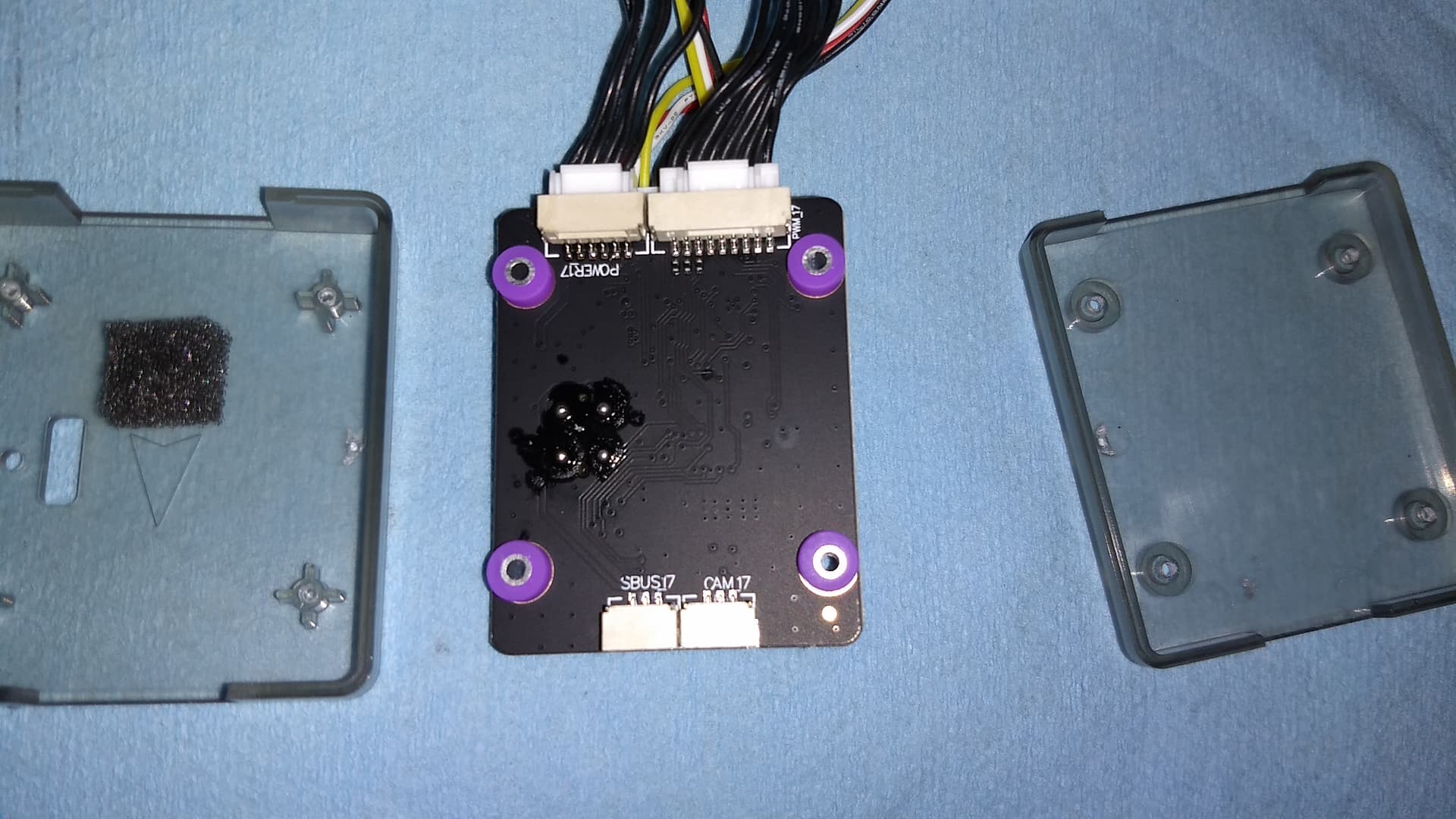
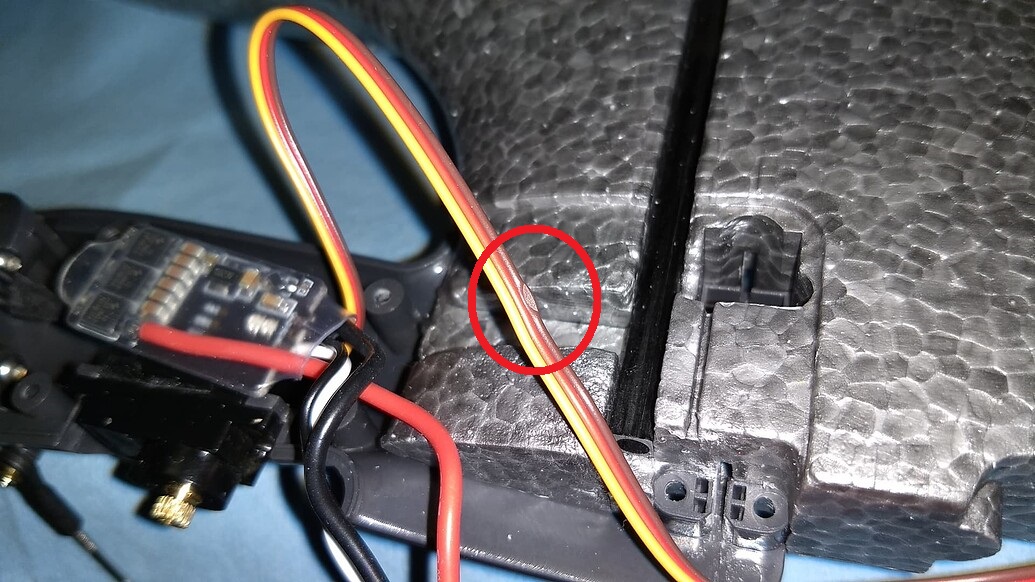
Couldn’t some of the power issues reported be caused by damaged wires? I removed the nacelle from the port side wing and I found two damaged wires. The tilt servo’s wire was pinched between the plastic nacelle pieces.
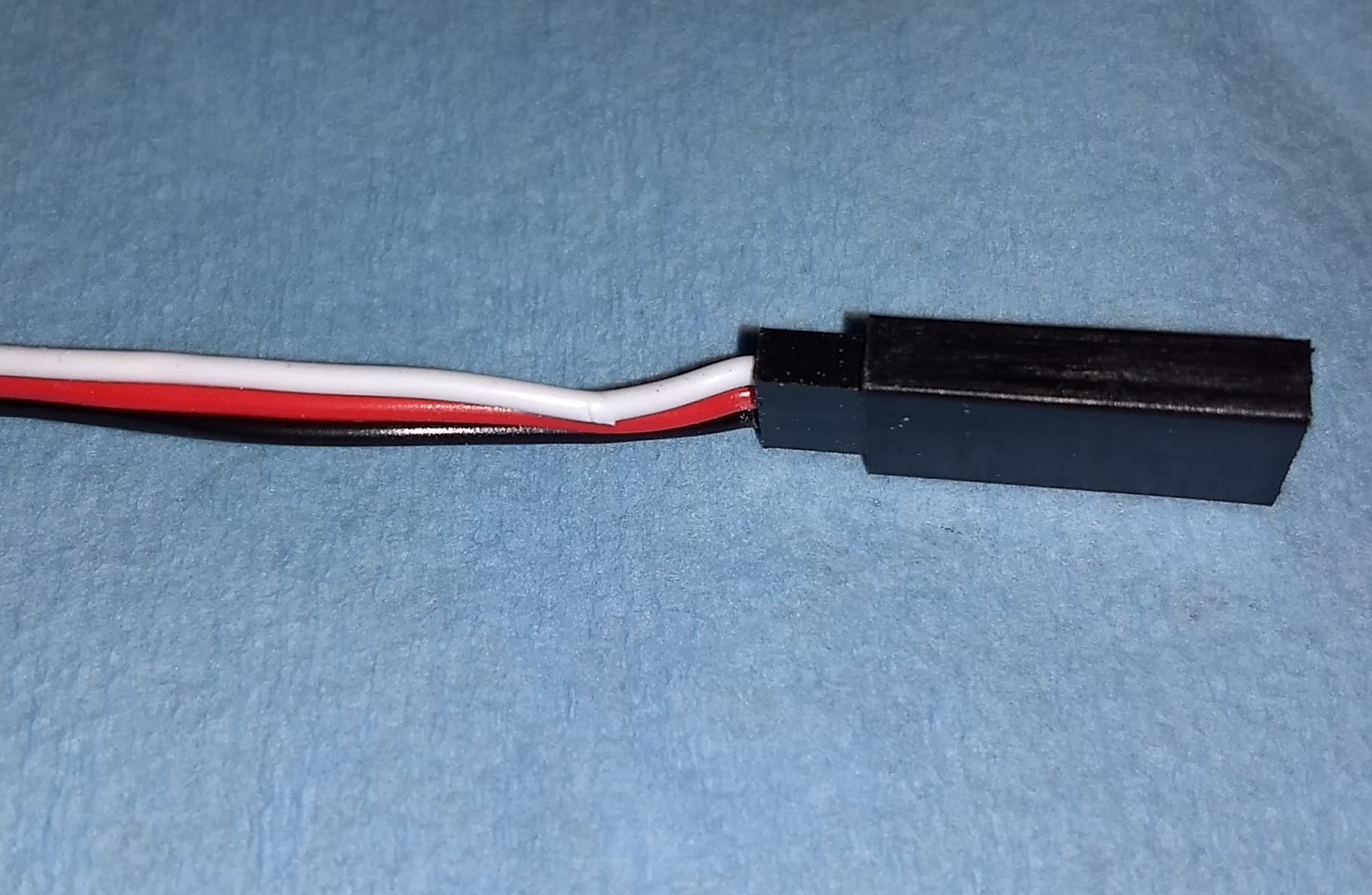
The extension leading to the aileron servo had been kinked bad and looked damaged.
I took the one nacelle apart because I wanted to see the tilting mechanism. Now that I’ve seen these damaged wires, I think I should take the other nacelle apart to make sure the starboard wiring is ok.
FWIW, the tilt mechanism looks pretty good. Each pivot point uses a small set of ball bearings to smooth out the action. I think most of the tilting resistance comes from the wires to the motor.
Edit: I circled the damage area on the tilt servo wire.
1 Like