This is a superb scan Ive had issues venting my DJI I printed this one off overnight its absolutely perfect.
Just wanted to post some pics and Thank SuperDave for releasing this canopy…

2 Likes
If you havent already Reach out to the ardupilot community to read your flight logs I havent any links am afraid. Mine is modified with genuine f405 chip and a compass mostly flies ok. bad weather is hampering me. Trick is use vtol mode just to quickly get height to transition. the stock plane mode tune is ok so far.
These things need a lot of work. Ardupilot takes a lot of work or learning should i say. For me its worth it
1 Like
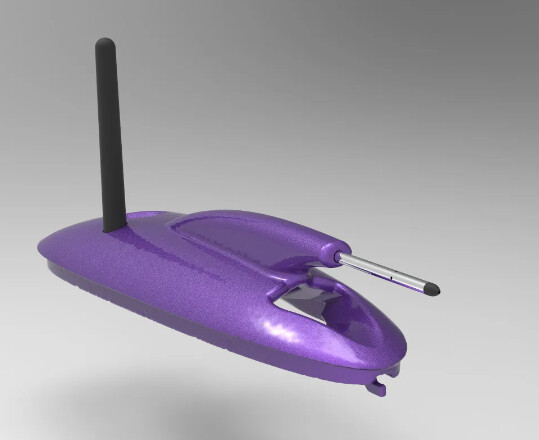
I designed a different version of the canopy.
Has:
- more aggressive cooling vent
- Pitot tube support
- SIK Telemetry radio mount
https://www.printables.com/model/459994-jumper-xiake-800-vtol-vented-fpv-canopy-2-by-beast
1 Like
I also made a remove before flight cover for the Pitot tube
https://www.printables.com/model/459999-pixhawk-pitot-tube-cover-remove-before-flight-by-b

2 Likes
Looks great I will try and print it on my Prusa Mini ![]()
1 Like
Short Q if anyone can assist. Got one and re-flashed to add compass (BN-880). Everything look ok on bench testing so good so far. Could not find any reference on the CG… Does anyone know where the CG is???
1 Like
Has anyone who has dropped a f405vtol into this got an image they could share just showing the install. I have just ordersd one, should be here in the uk at the end on the month. Ill also be ordering the matek vtol board, gps/compass and airspeed sensor locally next week or so. Just looking for some inspiration for when it all arrives.
So I’m at a loss here! I’m in the process of purchasing the RTF but someone mentioned that a lot of people’s XiaKe 800 are crashing during transition. I’ve been a little worried not being able to find any documentation online and now after hearing this am wondering if I need to just cancel the purchase? I dont have the kind of money that I can toss another $80-$100 on a Matek VTOL FC.
My main reason going with this was it was a RTF VTOL and I would not have to build up a kit component by component not to mention it’s size would also utilize my existing FPV lipos but if it crashes just trying to transition from hover to forward flight not sure how they can even call it a vtol…
The biggest hurdle for me is the fact that this will be my first Ardupilot craft. I have had dozens and dozens Betaflight and a few INav craft but this is also my first VTOL unless you count E-Flights X-Vert. I kind of don’t even want to try flying XiaKe if there are truly major transitioning issues. I’m still not certain if I should try to cancel the order or pull a return to sender and charge reversal if it does not work as intended.
I did just notice that the new SpeedyBee F405 Fixed Wing advertises ArduPilot and VTOL support and is like half the price of the Matek but I’m not sure if it can be setup for this tri-motor VTOL with only two motors operational during forward flight.
Heck I dont even know if this uses differential thrust not being able to find any documentation about it from Jumper or how to wire/configure the Speedybee if it would support this type of craft. I mean thats the main reason I shelled out for an RTF. I don’t even need the transmitter but thought it would be easier and faster to get it in the air paying for the complete package.
A lot of good paying for the RTF if it destroys itself during a transition though…
Ohh I dont know what to do here…
There is no magic to an Ardupilot supported board called a “vtol”. If it has the number of outputs for motors and servos’s it will work. That Speedybee board is currently supported in Master (Dev version).
The crappiest part for me is that I’m not only wheelchair bound but have such a small income that this “RTF” purchase is 6 months of saved money. I still have and fly Carl Goldberg kits I built more than 30 years ago and where I know foamies dont last nearly as long I have to have some piece of mind regarding a craft before taking it out to fly.
That was the whole reason I went with the RTF kit here. It was because I would not have to build it up from scratch as well as being my first interdiction into an Ardupilot platform.
Sadly though it sounds like if I want that piece of mind I should not only replace the FC but also the transition servos and maybe even get my hands on a decent GPS unit Compass. I’m considering just using one of my stand alone GPS units with a stand alone Compass/Baro unit. That is if the Speedybee FC can handle those additional sensors.
I was hoping someone who may have done away with the Jumper components could help me pick by telling me what they have used. Mainly what servos they used to replace the transition servos?
Damn I cant tell you how ticked I am at Jumper having to do all this after handing them money for stuff that sounds like complete garbage. I mean I want to be able to fly this in a little wind from time to time as well but mainly want to be able to get it in the air and not have it crash at no fault of my fingers.
Thanks for the help,
-BaTTaN
Hi. Unfortunatrly the term rtf has many diffetent degrees of meaning and anyone who has been in the hobby as long as clearly you have will be acutly aware that very rarely does something do “exactly” what it is claimed out of the box.
Having done some pretty deep research ive have ordered the pnp verson. Like yourself ive been the in the hobby for too many becades to wattent counting and have controllers etc… to hand. Like yourself i was very aware of the issues weith regard to FC and Servos so i reached out and spoke with a few people who have owned and flown this plane from new. Like with most things on forums you tend only to really see the issues as those who dont have any dont really post anything.
From those who have the plane and fly it regularly they love it and have no issues with it at all. With those that do have issues it would appear they all tend to come back to the servos binding. As such either delaying the transition and destabilising the craft causing it to flip. Alternatively binding in their entire travel therefore causing the servo to draw far too much current than the bec on the FC can provide causing it to “brown out” and the plane falls from the sky. They look like 5g or maybe 9g servos. Something that can im sure be identified in preflight checks while unboxing and replaced very cheaply.
Another issue i am seeing is where an otherwise perfectly performing craft is becoming unstable when transitioning to forward flight. While ardupilot is good at correcting for a poorly balanced craft it takes time for it to calculate and apply that correction. I wonder therefore if when installing the battery, given the lack of documentation that has reportedly been provided with this craft, weather people are just plopping a battery in with ill regard to CG, especially if they have come from a quad background where this is something that is often never considered, and therefore the craft transitions into forward flight tail heavy. And we all know what they say about tail heavy planes…
Im excited to receive mine in a couple of weeks. I have a t-pro with edgetx and elrs already so can populate the spot in the foam box. And looking at the setup process should be up and running in no time at all. I was going to order a Matek vtol board and swap into it before even flying it. However, the more people i speak to the more confident im becoming in the supplied fc. I have a few 5g servos from a zohd nano talon that got on the wrong end of a dog when i landed a little far away from me in the local park… i can swap in if the servos look dodgy.
It looks like its going to be the perfect little vtol plane to carry on the back of my mobility scooter. I cant wait to get it.
1 Like
Where are you guys based? Maybe I could help if your in the UK.
Nick
Same im in the uk also. Down in kent.
The stock RTF will work fine, no need to swap board. Just remember to transition with sufficient height and ample throttle.
2 Likes
I have just finished building one but didn’t fly it yet.
Any one of u in NI (UK)?
I have read through everything, what is the status of getting a compass to work with the factory flight controller? I see where some have had success and some haven’t. Any good how to guides?
1 Like
I tested with the firmware made by tridge and compass worked fine on the bench testing. However, once you start the motors the noise messes up the compass. I guess a way to overcome that would be to move the compass far on the wing and use shielded cable. That is my plan but did not get there yet…
1 Like
I bought the rtf with the jumper radio because I wasn’t sure how to configure everything… The voice pack was in Chinese… Fixed that then the voice prompts stopped working… Took out the sd card put it in the computer… Not recognised… Put it back in the radio… Didn’t work… So I bound a crossfire nano and used my tarranis… Following painless 360s radio set up guide… I have not had any problems with transitions… Flys well in fbwa… The only problem I have is landing… I’ve now found if I aim for my self bringing it in fairly low… Then switch to hover mode and land… I find if I transition back into hover mode to high I have problems getting it down… The less height you have the easier it is to land
1 Like