I am having issues with the Antenna Tracker which is built into Mission Planner (Initial Setup > Optional Hardware > Antenna Tracker).
It seems to be misbehaving in 2 strange ways:
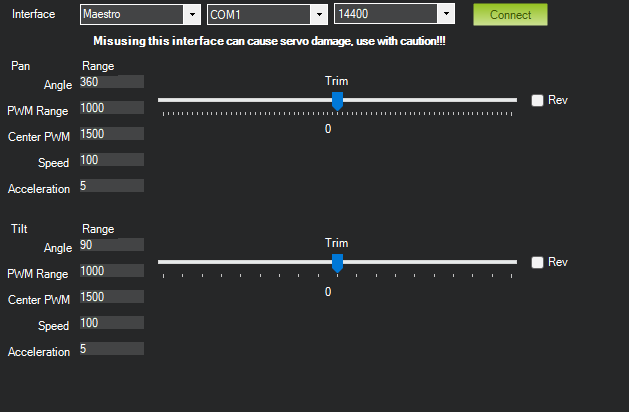
The position that the tracker assumes when the Maestro Controller is connected from Mission Planner and the trim is set to 0 (Center PWM - 1504), does not correspond to the same position as when the same PWM value (1504) is set in the Maestro Control Software.
The Tilt channel is seemingly ignored/broken. The servo simply goes limp when the Maestro controller is connected from Mission Planner.
I reverted to a previous, arbitrary release of Mission Planner (1.3.60 build 1.3.6899.37831), and the tracker/servo controller behaves completely as expected. Previously I was using the latest stable release of Mission Planner.
I wonder if anyone can come to my rescue? I’m not sure how I can extract any debug or other info that might be useful to anyone who can help me, so please let me know if/how I can get any requisite info to you!
I always use the last MP beta. I agree that MP Antenna Tracker adjustment is not easy, specially tilt. It mostly works after some manual adjustments when in air.
Observe here (4K) a modification for the tilt adjustment (PIP lower left). It permits adjusting the tilt manually without using the tripod handle, not distorting its horizontal movement (manual pan tripod adjustment doesn’t distort, since horizontality is maintained).
example
Pan
for 360degrees of travel, you need 1000 pwm range, and the center of the 1000pwm range is 1500
this means that at 0 degrees the pwm output is 1500 - 1000/2 = 1000 pwm
at 359 degrees the pwm output is 1500 + 1000/2 = ~2000pwm
if my pwm ranges where say 800-1600, because of servo limits then
i would need to set my mid to (1600+800)/2 = 1200, with a range of 800
this then would translate to at 0 degrees = 800pwm, and at 359 = 1600pwm
same goes for tilt.
Center pwm just sets the centre of the range, it is mainly use to trim the physical center point of the tracker… not to points it at the drone.
Pan servo 180º; tilt servo 90º.
Capture with camera pointing west.
BTW, unstable while in flight, specially tilt, as if height determined with baro, even with rangefinder at copter. So I cut the inverted U holding the camera at the gimbal for manual tilt adjustment while flying.
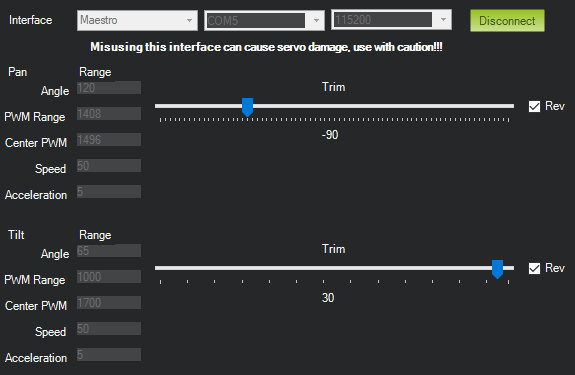
ok so from what i see
so your pwm range you see in maestro should be
1496 +/- 1408/2 = 792 to 2200 this is to cover 120 degrees
0 = 792
120 = 2200
the trim will move the centre from 60
tilt
1700 +/- 1000/2 = 1200 to 2200 to cover 65 degrees
0 = 1200
65 = 2200
can you confirm in maestro at 1200 what angle tilt is pointing?
Hi all!
I use the simulator to verify that the antenna tracker is working properly. Watch a video of how I do it Mission Planner Antenna Tracking SIMULATION - YouTube . In the second video Настройка БПЛА XENO - YouTube , I attached the video camera to an antenna tracker to control its direction to the plane. I used servo drives to control the ship’s winch, it’s a multi-turning device that makes 6 turns, so I used a gearbox with a toothed belt 40/16 gears.
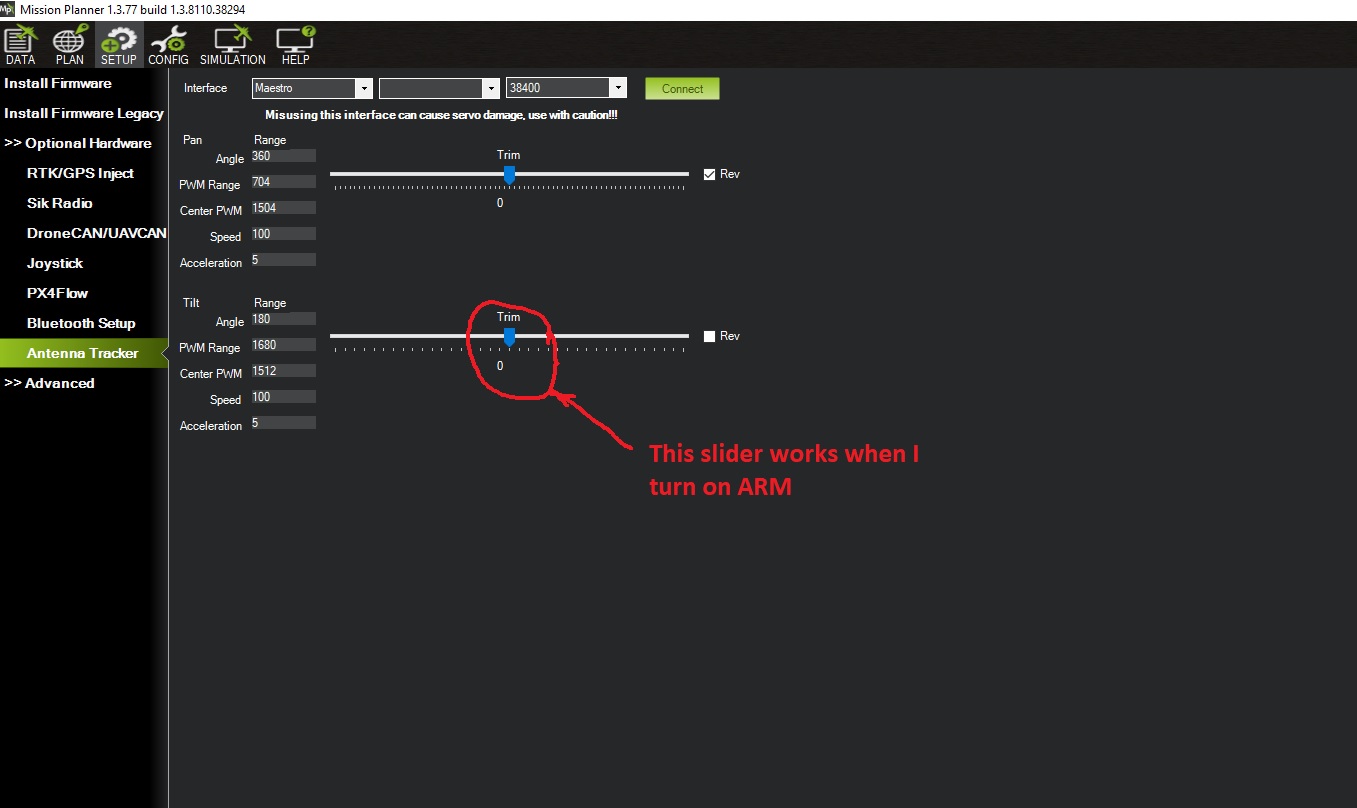
In the latest Mission Planner version 1.3.77, the TILT TRIM feature only works when I do ARMING, however in the old version 1.3.60 it was available when the antenna tracker was turned on. Please answer the developer why this was done.
Thanks for supporting the antenna tracker, this device works well with the Pololu controller!
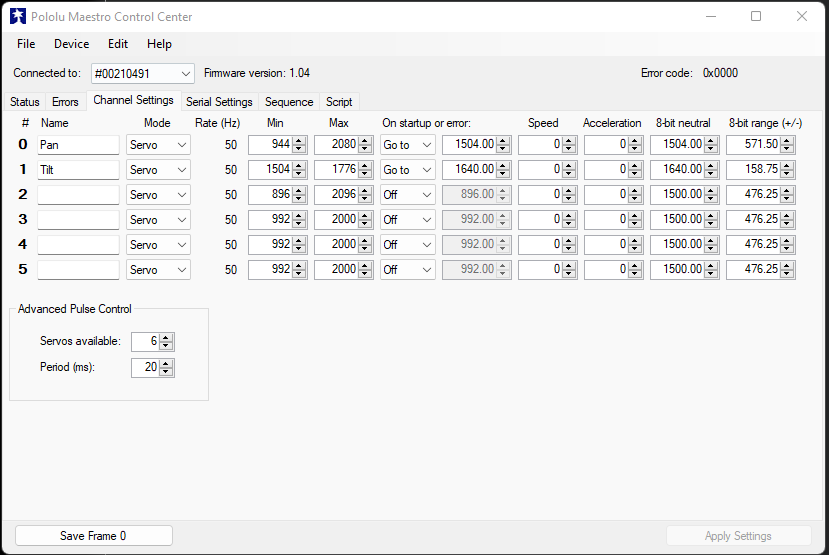
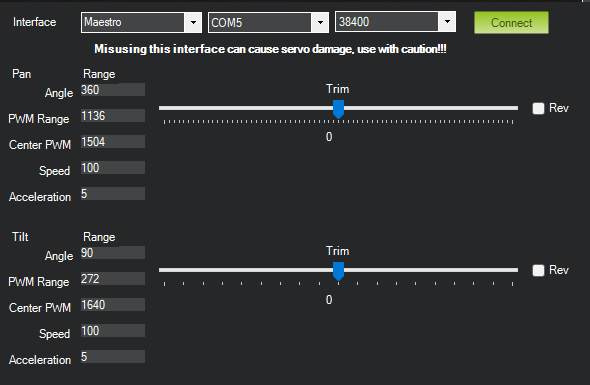
I have attached 2 snaps that show the settings from the Maestro Control Center and Mission Planner. These settings result in 360 deg pan and 90 deg tilt on the Maestro Control Software; 1640 pwm on the tilt axis puts the tracker at 45 deg elevation.
I still find it strange that the pan angle changes when connected to Mission Planner. And that the tilt axis does not respond when connected to Mission Planner
This is an indoor test (no copter, no GPS, no tracker home positioning).
Pan servo reasonably responds in range 800-2200 moving simmetrically near 180º. This range is run on MP tracker pan left half (right half seems to show an arithmetic error).
Tilt servo works differently and cannot be tested this way (I think in the past both could be tested).
I tried same gimbal on an old laptop with Windows 7 and old MP 1.3.68.1, with same Pololu driver version and same settings as far as I can, and all was normal:
Pan moves opposite (more similar to real gimbal movement).
I tried also on another laptop with upgraded MP, and the behavior was also abnormal. So it seems that at some past moment this easy test with Maestro Controller stopped being possible, although MP Antenna Tracker continued working.
I can confirm the expected behaviour has returned with MP 1.3.77.1 build 1.3.8266.5307 as @Webillo mentioned. Not sure if anything was changed, but thanks! Glad we could get to the bottom of this.