When Autotune doesnt do anything it is because one of the sticks is not centred. If any of the sticks are required to be off-centre or trimmed for normal flight then something is wrong and you need to fix that first.
Unable to tell what went wrong without a log.
Hi
Log is already uploaded
Link - April 2023 Logs - Google Drive
How to check the stick position from logs? Pwm!!??
I think I need to understand how to check datatable
I dont see any Autoune in the latest log, there is only Stabilise mode.
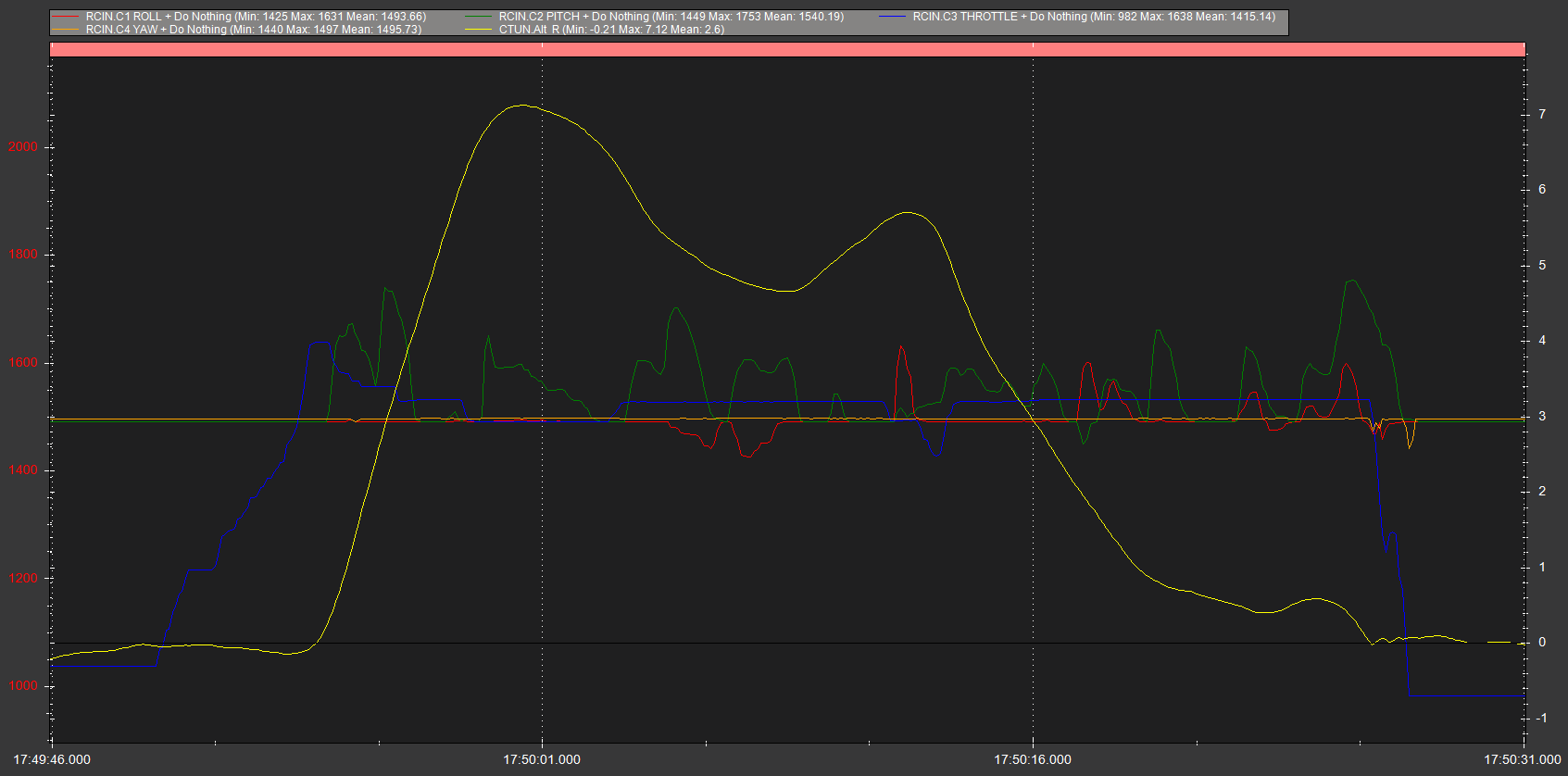
You need to set these, not the way you have it
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
At the moment you have no action for low voltage, but are expecting the copter to do an RTL at critical voltage. When you take off the voltage drops to LOW level practically right away, so this battery is already spent. I assume you probably set BATT_FS_LOW_ACT,0 to ignore the low voltage warning and keep flying, but this will only make your battery worse.
If the voltage at the battery is OK then you need to fix the wiring or connector problems that are causing the voltage drop.
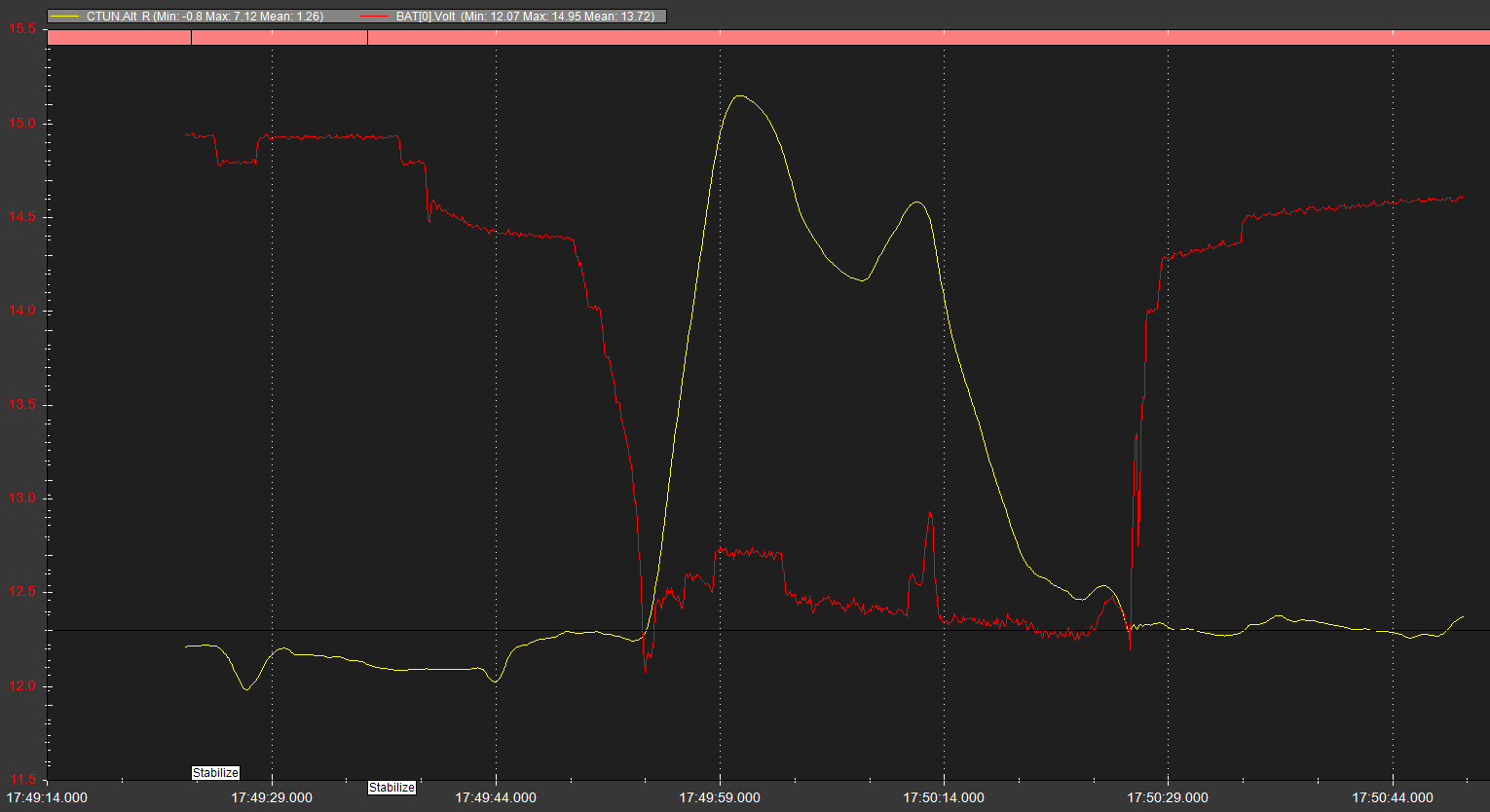
I cant see why it’s descending uncommanded except that the copter is a bit underpowered/overweight and the battery voltage is at LOW
Shawn, extremely sorry.
Very much bad from my side. I uploaded the wrong log and was expecting a solution.
I have uploaded the correct log. Kindly check. Sorry for the inconvenience.
I will definitely do the settings for RTL at the critical warning. Because as of now I am not going even 50 meters far. Once this is done, I have to strictly follow that standard of Low and critical actions.
I have tried to perform AUTO TUNING.
Log - May 2023 Logs - Google Drive
The copter performs left and right tuning. It does not lose altitude or anything. However, it says, Failed to tune, tune manually.
Requesting for the further guidance.
Thanks
Adjust these:
ATC_THR_MIX_MAN,0.5
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
PSC_ACCZ_I,0.68
PSC_ACCZ_P,0.34
and I would try these PIDs to see if flight is a little more stable, the changes are relatively small.
ATC_ACCEL_R_MAX,120000
ATC_ACCEL_P_MAX,120000
ATC_ACCEL_Y_MAX,20000
ATC_ANG_RLL_P,7.0
ATC_ANG_PIT_P,7.0
ATC_RAT_RLL_P,0.11
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_D,0.0037
ATC_RAT_PIT_P,0.11
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_D,0.0037
use Stabilise mode to launch, so you will be able to quickly and easily land if there are issues. If there is stability then change to Althold and do some pitch and roll testing.
1 Like
The test was fine and the flying was smooth. If I compare, I will say, it was better than before.
A little yaw alignment changes I have identified. But not sure if it was due to wind.
Log uploaded.
Add this in:
INS_HNTC2_ENABLE,1 // write and refresh params to see the rest
INS_HNTC2_MODE,0
INS_HNTC2_REF,0
INS_HNTC2_FREQ,38
INS_HNTC2_BW,10
INS_HNTC2_ATT,40
INS_HNTC2_HMNCS,1
I saw this rogue frequency in the earlier log and thought it might be from the Autotune twitches, but it’s still there now.
Do a test flight and see if it’s any better - the improvement may only be visible in logs though.
Try running Autotune on one axis again.
1 Like
Hello
I set this parameters and flew in stabilize. In terms of observations, i did not like the operation as it was always reducing the altitude.
Put in alt hold and felt a bit stable. Switched to auto tune. This time it tuned the roll parameter successfully.
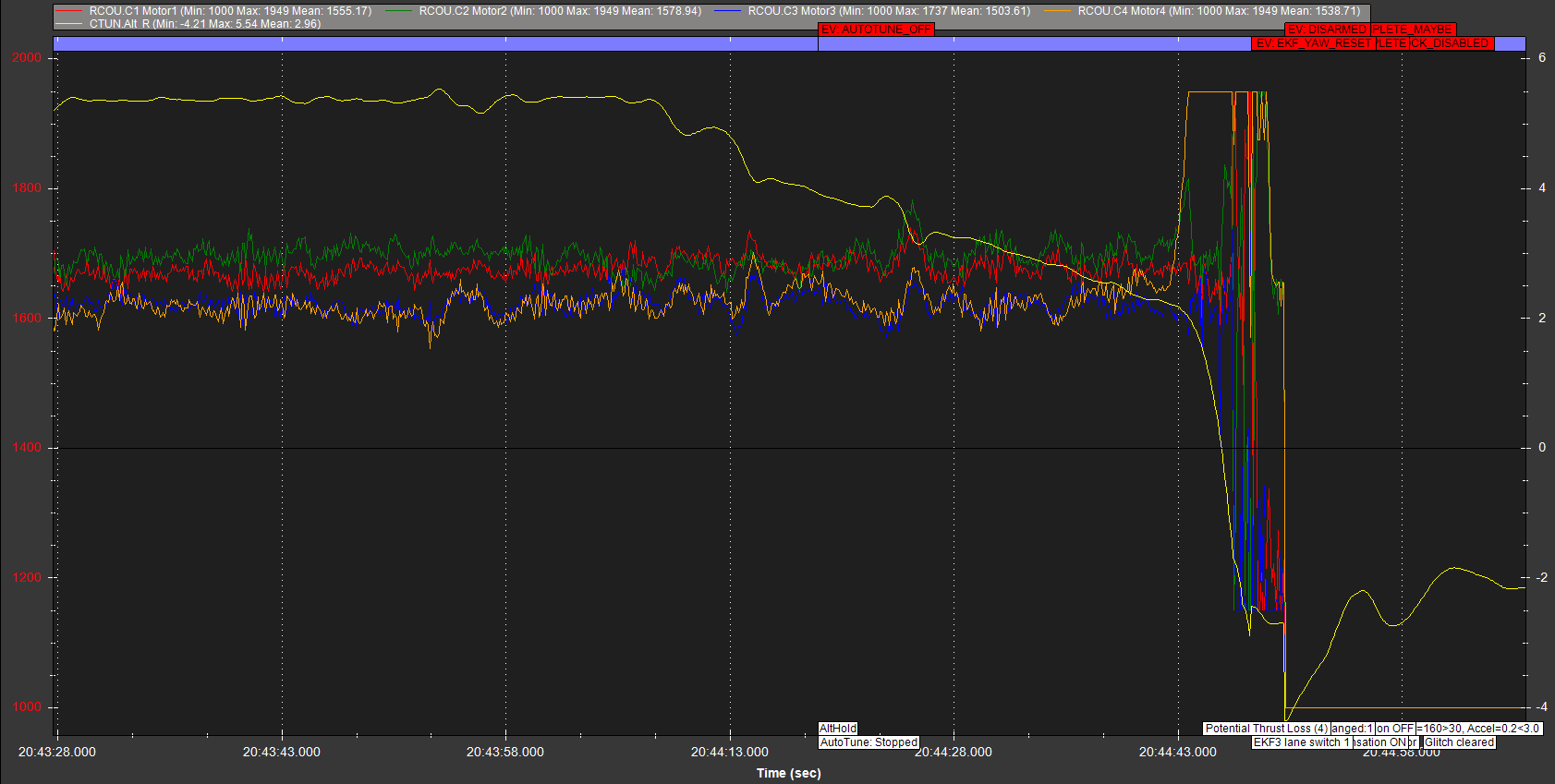
Before landing in autotune, i switched back to alt hold. To check performance. However before i again switch it back to autotune to land and save the parameters, it came down with a message “potential thrust loss (4) and on HUD showing error velocity variance”
Kindly check the logs. Also share where to fiind the tuned parameters in the logs.
There is definitely thrust loss for motor 4 , like the prop was coming loose maybe?
Or if the motor or ESC was overheating that could also affect performance.
I think your initial altitude issue at the start of the flight in Stabilise mode is probably just the sensitivity of Stabilise mode. The copter performs fine in AltHold and even Autotune.
Put these in for both Roll and Pitch
AutoTune: Roll Rate: P:0.203, I:0.203, D:0.0063
AutoTune: Roll Angle P:13.752, Max Accel:113223
which is:
ATC_ACCEL_R_MAX,113223
ATC_ACCEL_P_MAX,113223
ATC_ANG_RLL_P,13.75
ATC_ANG_PIT_P,13.75
ATC_RAT_RLL_P,0.203
ATC_RAT_RLL_I,0.203
ATC_RAT_RLL_D,0.0063
ATC_RAT_PIT_P,0.203
ATC_RAT_PIT_I,0.203
ATC_RAT_PIT_D,0.0063
If you can figure out what was wrong with the thrust loss and fix it, your next step would be to run Autotune on all axis at once.
1 Like
Isn’t ATC_ANG_RLL_P and PIT_P =13.75 out of range?
Are you talking about the “suggested” ranges shown in Mission Planner?

Most of my Multirotors would not fly well within some of these ranges. Here is an example from one of the Developer’s builds posted as a Blog for everyone to use for a similar craft:
ATC_ANG_PIT_P,35.36256
ATC_ANG_RLL_P,35.36256
Clearly those ranges do not cover all configurations.
1 Like
Yes. I was setting it and the question popped up. I have already set the parameters. ![]()
Going to the field shortly.
Hello,
Flight Update
During Arming and powering up for the take-off, I found that the motors are pulling more than before it used to pull, just after increasing one notch (post-arming). This wasn’t there before.
Stabilize and alt hold tested and switched to Autotune. It took a long time in Roll tuning as well as it was a little windy compared to yesterday evening so I had to control its position in between. The battery was reaching near low voltage and just then it shifted to Pitch moment. I changed its direction as per the wind. Then the same thing happened yesterday. Motor 4 failure.
I have cross-examined and tested that all the motors and escs are fine. Even after the crash landing, I checked the motor for heat issues and it was a totally normal temperature. Yesterday it was hot, but yesterday evening the temperature was much hot and humid, windless. Today it was around 2 to 2.5m/s wind. So, it is not the motor/ESC issue. It is just happening due to props and the bullets.
As far as Nylock nuts are concerned, I have the required Nylocks, but these are clockwise tightening, whereas we need two clockwise and 2 anti - clockwise tightening nuts and that is not available here. So I am planning to use two hex nuts in one shaft. I hope this will work. In case you have any suggestions, please do share.
I also have a doubt about my 8 in. CF props. So, I think, the propeller slips are happening due to the carbon fibre material. It is from Emax. but I did not like the quality.
Also, I would like to know that even after setting yesterday’s parameter, why did the roll tuning take this much time? That’s actually not a matter. I am willing to know that if we again do the full tuning, will it again start from Roll or resume from Pitch axes?
Logs updated
Run one axis of your choosing at a time if battery consumption is problem with the AUTOTUNE_AXIS parameter.
1 Like
Hi,
I have done tuning for 2 axes separately.
I got the ATC_RAT PID values from ATUN RP and RD.
But how to decide on ATC_ANG and ATC_Accel values? I did find that ATC_RAT values can be found from ATDE RATE but which point value to be considered is a confusion. ATC_ACCEL, I could not find those values.
Thanks
I dont fully understand the questions - do you mean you tried to run Autotune but the new values might not have saved and you want to extract them from the Autotune log?
Or you want to decide which Roll values to apply to the Pitch values to jumpstart the next Autoune?
Start by supplying the .bin log you have so far
Yes.
I mean, I have done the tuning but not saved the parameters, from where to extract those? Actually, I came to know about two of the parameters but the other two (as mentioned in the previous response) are something I cannot identify.
The latest log of 6 May is already uploaded.
I know you will help and provide the values but I do not want to bother the members with small things. I mean, I am trying to decrease that by learning. ![]()
Thank You
Why not? Perform Auto Tune, land while it’s still in Auto Tune and disarm. That’s it.