Thy using the github master version of PX4 firmware. And if that does not work, try using the github master version of Ardupilot firmware. That will work for sure.
1 Like
Hi, @LuckyBird ,
since I want to pass quaternions, I am planning to use ATT_POS_MOCAP which means I’ll have to publish data on /mavros/mocap/pose topic is this topic supported by ardupilot
and since /mavros/vision_pose/pose already takes in quaternion, is there a need to use above mentioned topic?
thanks
Hello,
I would like to thank you for this incredible work, you made our life easier.
I’m trying to implement an algorithm to follow a wall outdoor in a gps-less environment, for that, i integrated a Realsense d415 on an nvidia jetson xavier for SLAM position, i used mavros and rtabmap algo to calculate and send vision_position_estimate, and then made few scripts to guide the drone where-ever i want.
The problem is: Slam is not working properly, trajectory on MP is different from real one, and it seems that this problem is coming from vision_position_estimate YAW value not correct, it can also be seen on MP, the heading is incrementing permanently.
Also, the message bad vision apears on the MP hud
Do you have an idea to solve this issue?
Here’s a screen shot:
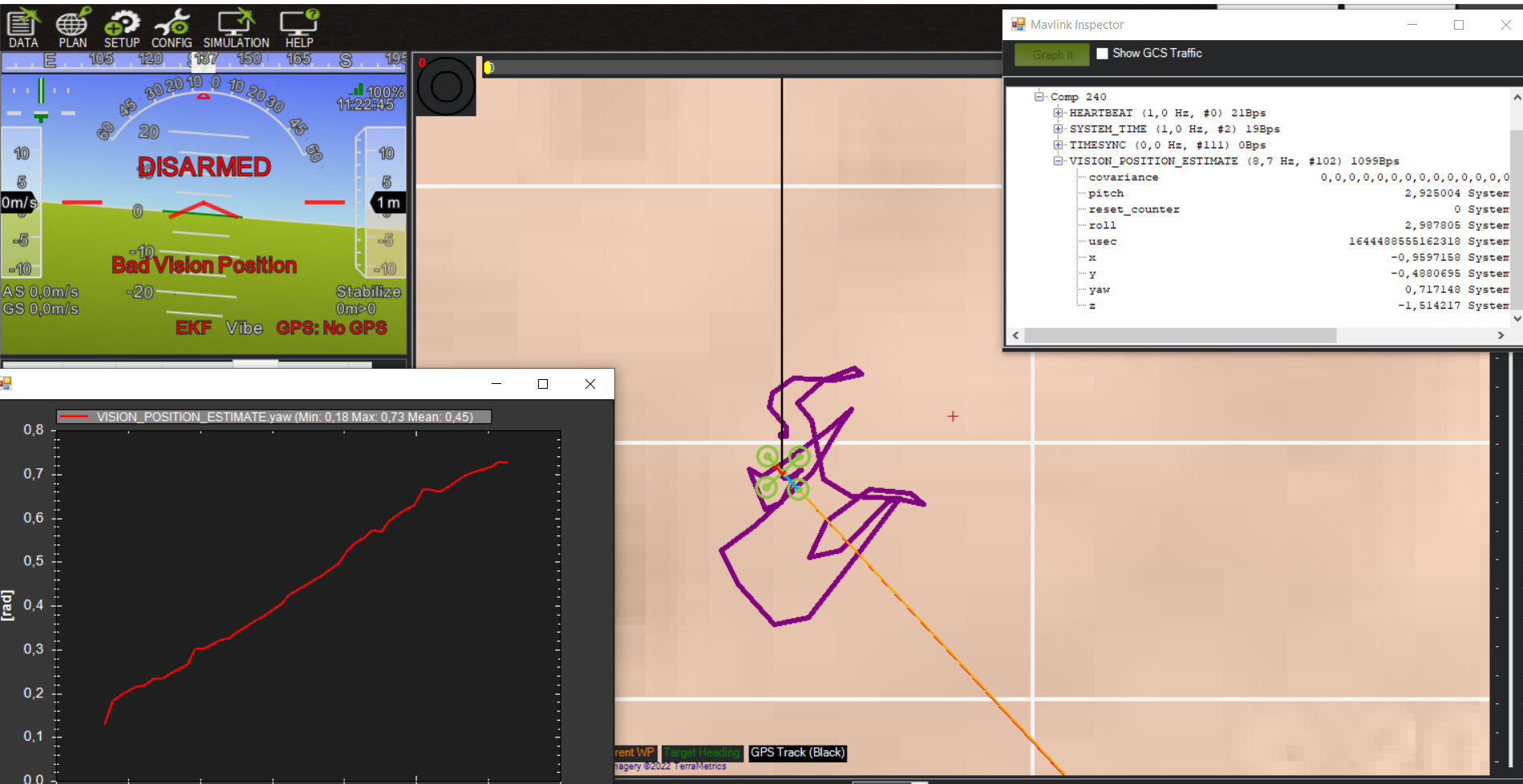
Thank you in advance
Hello! We are working to implement this project and seem to be having some issues and the VISION_POSITION_ESTIMATE topic is not showing up on ArduPilot. Are any changes made to the apm_config.yaml file? Do we need to create a transform between camera_link and base_link? It would be very helpful if someone could provide a tf_tree and rqt_graph of a working example? I just want to make sure we have everything working as it should. Thanks for all of the help and the awesome project!
Hi, I already got my mavlink inspection shows the vision_position_estimate, and set ekf origin here, the icon appeared. But when I moved my drone, in mp it is not moving, no trajectory, but heading still can move. Anyone know why?