After upgrading from 3.6.10 and 3.6.12, I wanted a tighter tune using Copter 4.0. I’m using the RoboCat 250 mm frame, Solo 3DR Cube 2.0 w/Mini Carrier hard mounted, DYS 2204 2400kv motors, 6x4.5 Gemfan props, 3S 1800mAh 45C Tattu battery, with a Mro M8N GPS and 915 Telemetry.
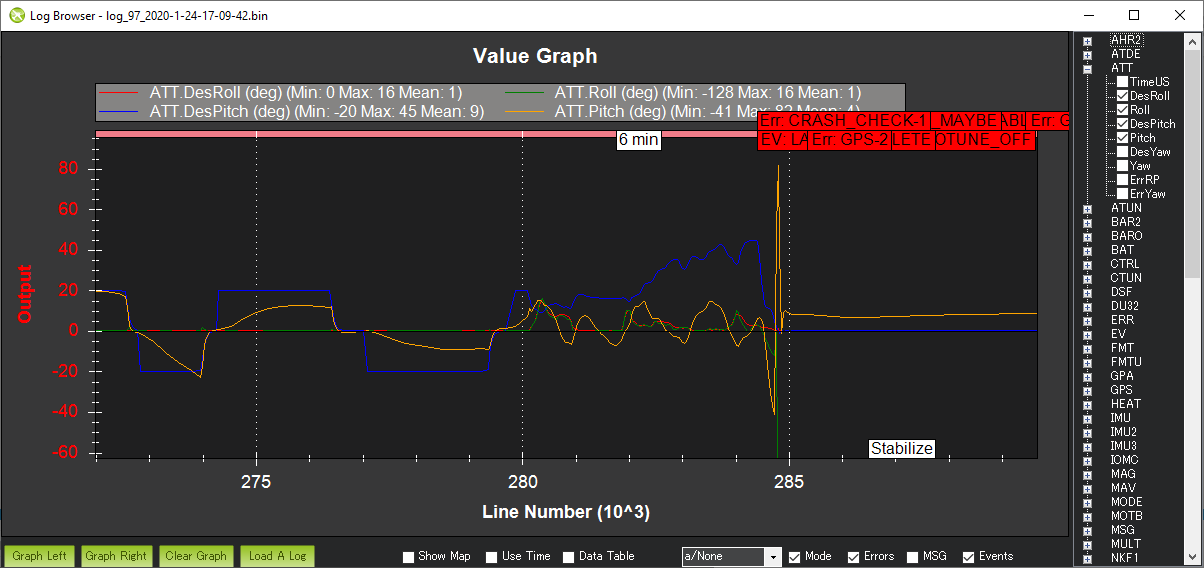
Solid craft, can hit 53mph @ 33 Amps. The attached log is from a failed AutoTune. During a Roll and Pitch tune, the copter just fell from the sky like it had lost power, battery was showing 11.07 when it fell. Any advice from the log?
-PS. I have another 270 mm frame w/similar components that will not complete a AutoTune, after tuning for more than 5 mins on 1 axis, its falls out of the air. Unfortunately its only a TLOG, no BIN file. SD card is busted.
I checked your log. I can’t see anything particular wrong with your log.
I check the log messages. The last moment before your copter crashed, There is pliot a manual control override the Autotune. And your battery is down to 11V when it fell, There is not too much power left, And AutoTune can request very large and fast changes in outputs to the motors which need lot of power. Also if your copter seems overly twitchy, you should reducing the AUTOTUNE_AGGR
I appreciate your time looking into this, I have battery failsafes in place to land at 10.6V and 10.4V. I have managed to get a completed AutoTune on 2 axis with 1 battery in the past, ver 3.6.10. Also, it has cancelled the AutoTune because of low voltage, and safely landed. I can lower the AT AGGR. Before either quad crashed, the copter had wider and wider AutoTune pitch and roll swings.
This is similar to what happened to me. During Auto tune complete shut down. Sorry Im new here so my understanding of the logs is limited. When i look at my logs its hard to see and obvious problem but when i was standing there and the craft dropped from the sky I could see a pretty obvious problem
One recommendation I will make… auto tune one axis at a time and evaluate battery levels in between. I have had a 3 axis auto tune take over 20 mins on a big octo.
Yesterday I did get a complete AutoTune with Roll only, after 5 mins. Battery was @ 11.6. The tune was not good, sloppier than the defaults. I changed out flight controllers and started over from scratch. Defaults seemed to best so far.
@rmackay- Yes sir, it was pitching a lot more than the AutoTune commanded. I’m used to AutoTune finishing each axis in about 3:30 mins on my larger copters, eg. 500mm/700mm. The smaller frames seem to be more difficult to tune.
Because of this crash and the very similar one linked above, @Leonardthall and I spent a fair bit of time today and yesterday reviewing the AutoTune code and I’m afraid we’ve discovered a bug that likely contributed to your crash. AutoTune was not properly restoring the original gains when the vehicle was switched out of AutoTune. This meant I-term was left at a very low value which, for some vehicles, would result in bad attitude control. We’re really sorry about this but if it’s any consolation we’ve got a fix now that is being tested and will be included in the next point release.
Thanks again for the report and sorry for the troubles.