Hi @Kowal666,
I’m afraid because the tuning is quite bad on the vehicle it triggered the Crash Check. The crash check can trigger if the vehicle maintains a 30degree lean angle error for more than 2 seconds and doesn’t seem to be accelerating by more than 3m/s/s.
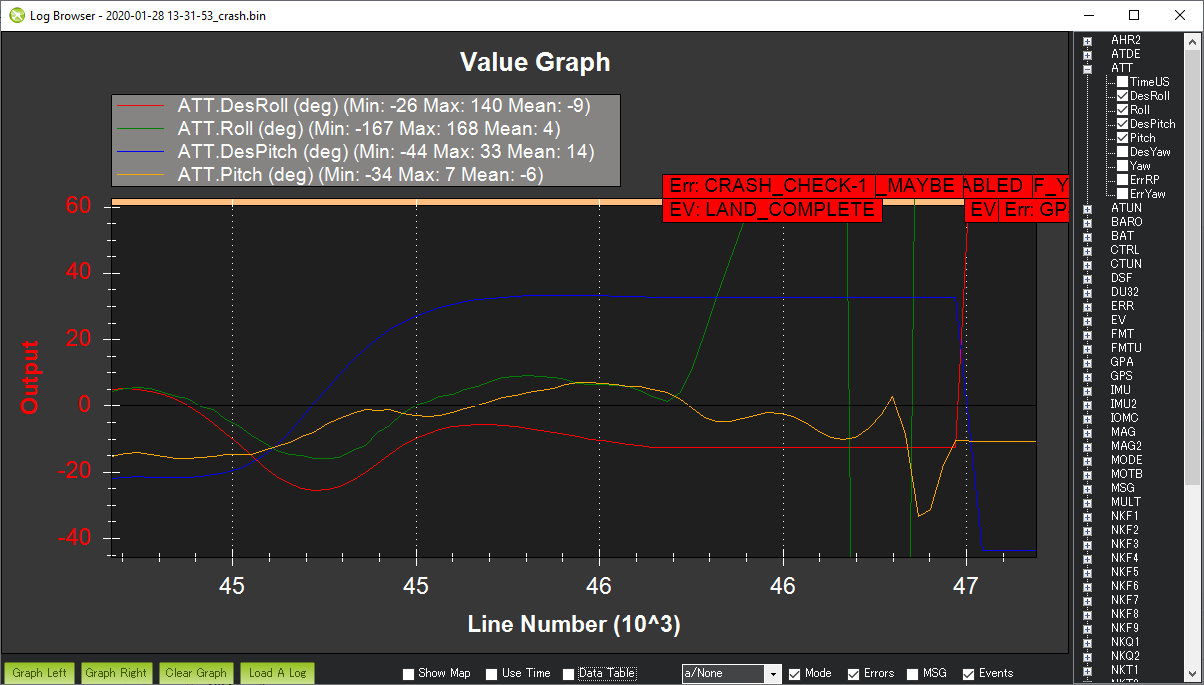
So in this case the vehicle was attempting to pitch at about 30 degrees (see blue line) but it’s actual pitch is shown in orange and it’s much lower.
So sadly in this case the tuning is bad enough that the crash check triggered. The crash check can be disabled by setting FS_CRASH_CHECK = 0.