In the imu tempreture calibation steps it says that keep the controller steady for 1 or 2 hours. I want to know do I need to keep it power on or off
take it out and power it ← it is all there in the previous sentence
Greetings,
during the IMU temperature calibration at a certain point I get this error message:
PreArm: Internal errors 0x800000 I: 181 stack_ovrfl.
What does it mean.
Then the same thing regarding the TCAL_ENABLE parameter in the Arducopter guide there is no reference while in the video (ArduCopter 7" LR Build Video 18 - Precise IMU and Compass Calibration) by Andy Piper you can see that it is brought to the value 2 before starting the calibration and then when it is finished you see the operator who returns it to the value 0.
Can you clarify this for me?

That is bad and should not happen! Which FC? which FW version?
The autopilot automatically sets that value back to 1 and you should not change it!
On the Methodically configure and tune ArduCopter it is never set to 0.
Hi, browsing the forum I also found this explanation…(When (during/after) doing the 4.1 IMU temperature calibration, “Internal errors 0x800000 I: 181 stack_ovrfl” pops up. The temperature calibration does complete successfully on all IMUs and the error goes away after a reboot)…what do you think??
I redid the calibration again and this message reappeared again…which however disappeared after I restarted the Pix.
Firmware
ArduCopter V4.4.4 (db53a28f)
ChibiOS: 17a50e3a
Official release:
Copter-4.4.4
Flight Controller
fmuv3 002A0029 30365106 32363637
Board ID: 9 CUBE_F4 (Pix 2.4.8)
Internal Errors:
0x800000: stack overflow (1811 times, line 181)
IOMCU
Status read errors: 0 ![]()
Flight Controller errors: 0 ![]()
IOMCU errors: 0 ![]()
Delayed packets: 0 ![]()
Dou you have scripting enabled? You should have scripting disabled at this point.
if I wanted to redo the Imu temperature calibration how should I proceed??
See the respective section on Methodically configure and tune ArduCopter
But within 10 min the buzzer rang a sound like it is completed
do I need to keep it for hours after that @amilcarlucas
Do you have a FC with IMU heating? What are your settings?
Being finished within 10 minutes means your calibration isn’t optimal, because you stopped it early with INS_TCALx_MAX being too low. Basically if you let it run until there’s no more temp increase it would cover a wider range of temps.
No, the two hours is a worst case for users without a buzzer and without a USB cable connected to check for parameter changes.
My hexarotor is unstable and paning to left and crash after takeoff
@amilcarlucas
will the IMU calibartion fix it
here is the log file can you ckeck na let me know is there any problems in it
IMU temperature calibration per se will not fix the issue. But following all the points in the order presented, will fix the problem.
You can either:
- waist a lot of time trying to find the exact problem, and after fixing it you might find another, and another. etc or …
- You do the stuff we recommend you to do, in the order we tell you to, and in the end all current problems and future potential problems will be solved.
Do you want option 1 or option 2?
1 Like
You’re still on defaults.
Vibrations are very high.
Motor oscillations are very high.
IMU temp calibration will not fix the visible problems you’re seeing. You should do it regardless, but you’re dealing with more fundamental issues.
I suggest you take @amilcarlucas 's advice and follow option 2.
I will choose option 2 as I don’t have any previous experience with pixhawk mission planner or QGC
@amilcarlucas
Then read and execute the instructions on the blog post and post a zip file with all intermediate.param files
@amilcarlucas this is the results after IMU temp calibartion
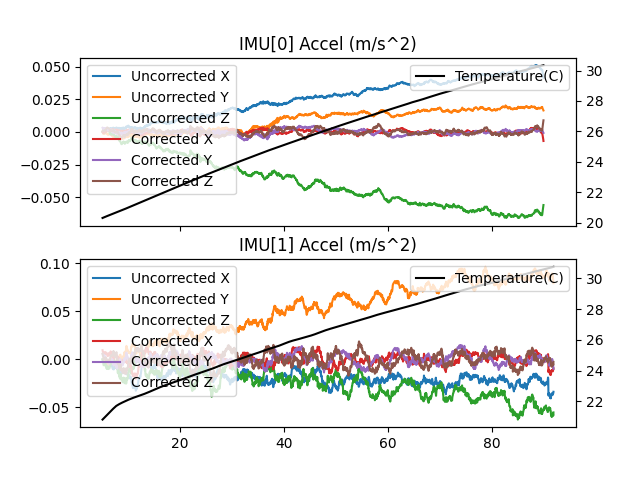
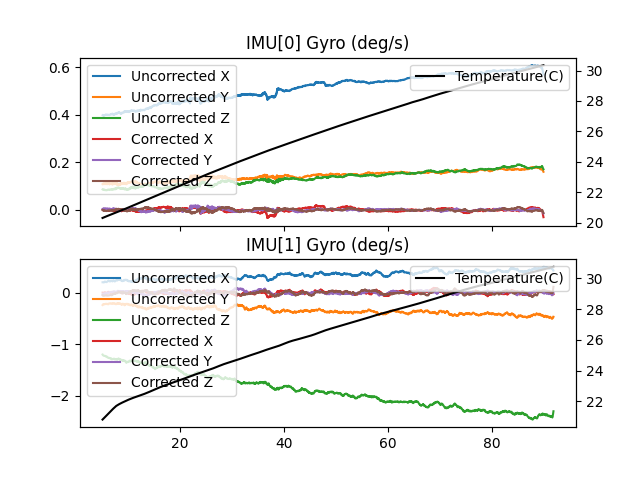
Minimum temperature is 20 °C, you did not place the board in the freezer.
I did but when i’m connecting those cables the temprature have changed
I’m in Sri Lanka so these days it it bit hot here. Is it ok if I connect the usb and fc and the buzzer only for this except batteris and esc’s
@amilcarlucas
Yes only usb and buzzer is enough