I am looking for a way to use ArduPilot logs in video stabilization using GyroFlow.
For the time being I thought that IMU Batch Sampling is the way to go, as it can log the sensor values at a high enough rate. However, I have found an issue with that, which I believe I cannot easily overcome.
Does IMU Batch Sampling log only accel for ~1s, then only gyro for the next ~1s, then again only accel and so on? If my log analysis is right and it really does it this way, is there an easy way to fix that?
Well, since I am not allowed to just delete this post, I rather mention here that 4.2+ firmware has a VideoStabilization log option. GyroFlow has some support for ArduPilot logs in its 0.3.0-dev branch, and will hopefully support them soon in its 1.0 branch.
Did you ever figure out how to use it? I checked off the box under the video stabilization option for logging but I don’t see the log files being created. Is it within the .bin file? Do the other boxes need to be checked off as well such as IMU or ATT fast?
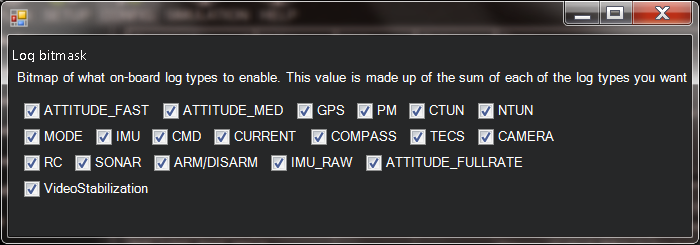
The bit 20 “VideoStabilization” does not create any additional logs. It puts all the necessary data to the main log. GyroFlow knows how to read it, so you just show the *.bin file to it.
The other bits are not related to it in any way, and may be safely switched off if you wish.
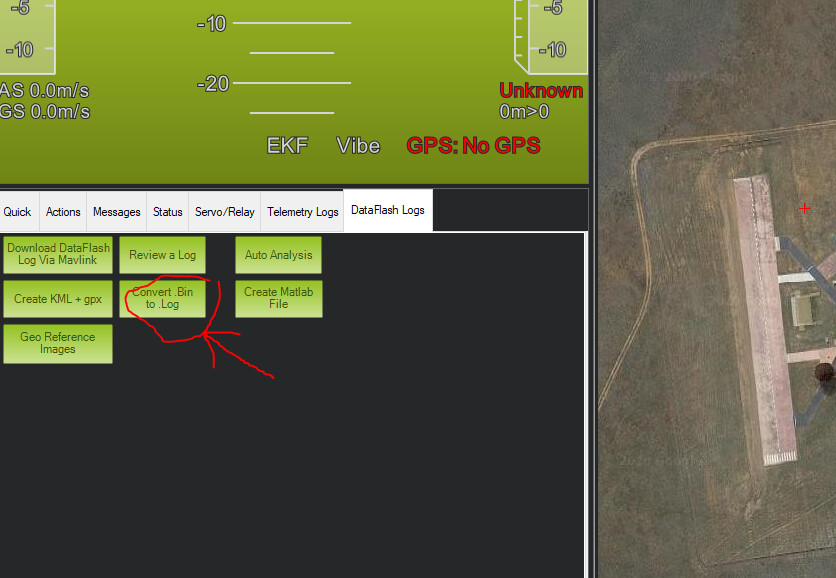
Correction: the old GyroFlow 0.3.0 did know how to read *.bin files, but the new one 1.0.0-rcX does not know. I am still looking for a good solution to use the new GyroFlow, since the apparently obvious conversion from bin to log by Mission Planner seems to produce unreadable files.
The latest build, 1.0.0-rc5, gives me “Unsupported format error” for such a log.
I have tried generating it both by Mission Planner and APMPlanner2, in both cases Gyroflow did not understand me. VSTB entries are generated, and I can visually confirm, by examining the contents of the *.log file, that they are here.
Investigated slightly further, it worked for abit but then got broken again before the latest release went live. Were really not having any luck getting AP support working…
The good news is that the AP side is working fine, so you can save up all your logs for when Gryoflow is fixed. If your feeling slightly more intrepid you can also build Gryroflow locally and point it at a older commit of the telem parser and it works just fine.
Just in case - VSTB is not a config parameter. VSTB is the name of the log entry, e.g. you may see them in a log analysis tool.
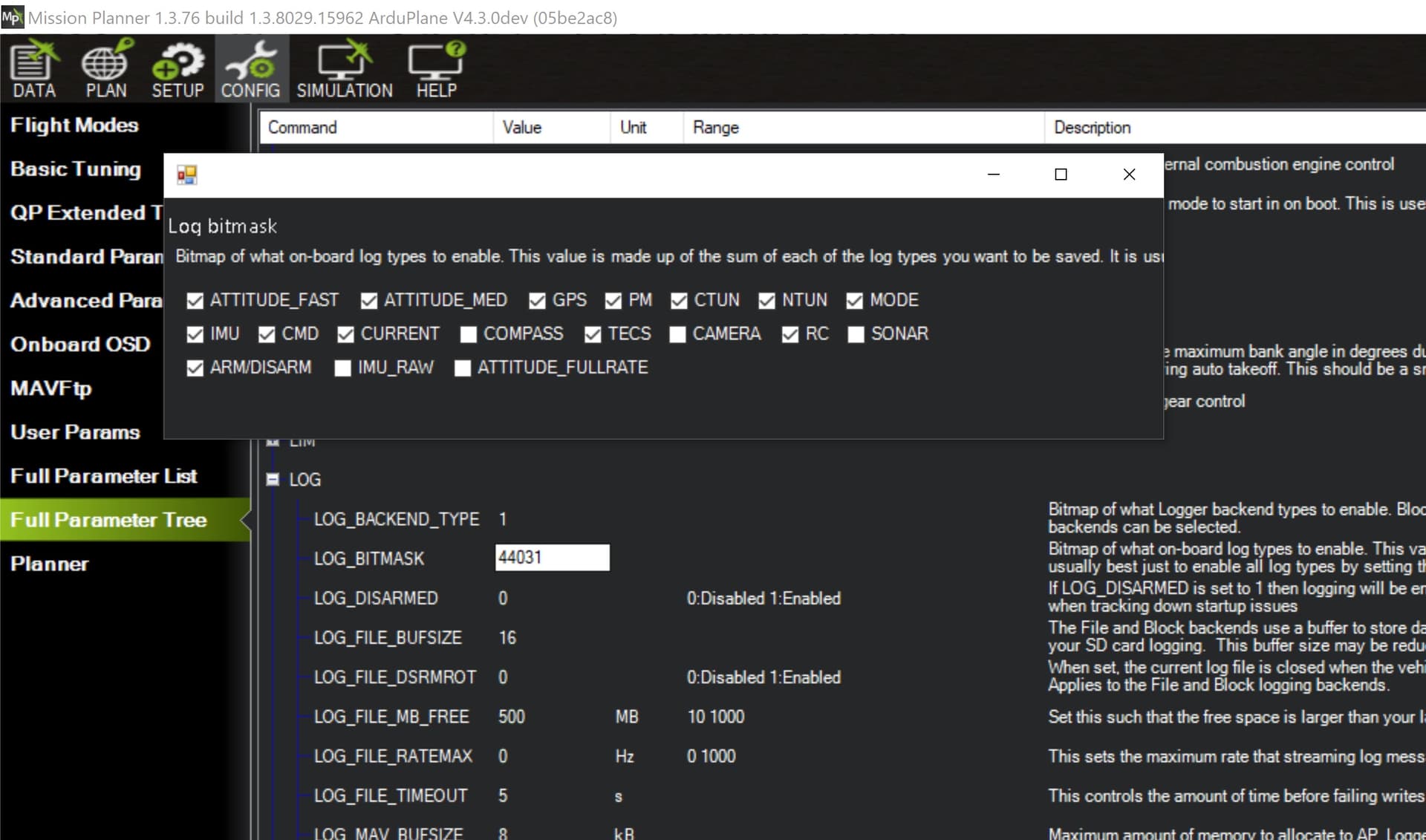
To enable those, set bit 20 of the LOG_BITMASK config parameter. The name of bit 20 is “VideoStabilization”.
If your mission planning software supports setting separate bits, you will be able to get/set it under this name (see the screenshot few comments above).
If not, go to the full parameter list, take your current value of LOG_BITMASK, add 1048576 (which is 2^20) and write it back. Here I assume you have not enabled it previously; the more correct modification procedure is, of course, to perform a bitwise OR with 2^20.
Regarding hardware, I don’t know whether the presence of this feature is hardware-dependent, but based on what I have seen on some occasions, it is not.
Hi GyroFlow is a interesting option for video stabilization. Is this log with this “VideoStabilization” option will be useful even when camera is on separate gimbal with hardware vibration dumper or @MaxBuzz or others are creating vibration logger based on ardupilot hardware ?