Not sure if I got your question right, but Gyroflow assumes a fixed angle between the camera and the log source. So if you intend use logs from a flight controller (whether it runs ArduPilot or any other software), the camera should be mounted rigidly* to the frame. Otherwise, you want logs from the camera itself.
*the necessary footnote: the frequencies above half the logging rate (400 or 500 Hz for AP, I don’t remember which one) cannot be processed anyway, so if your vibration damper cuts these frequencies only, that will work even better.
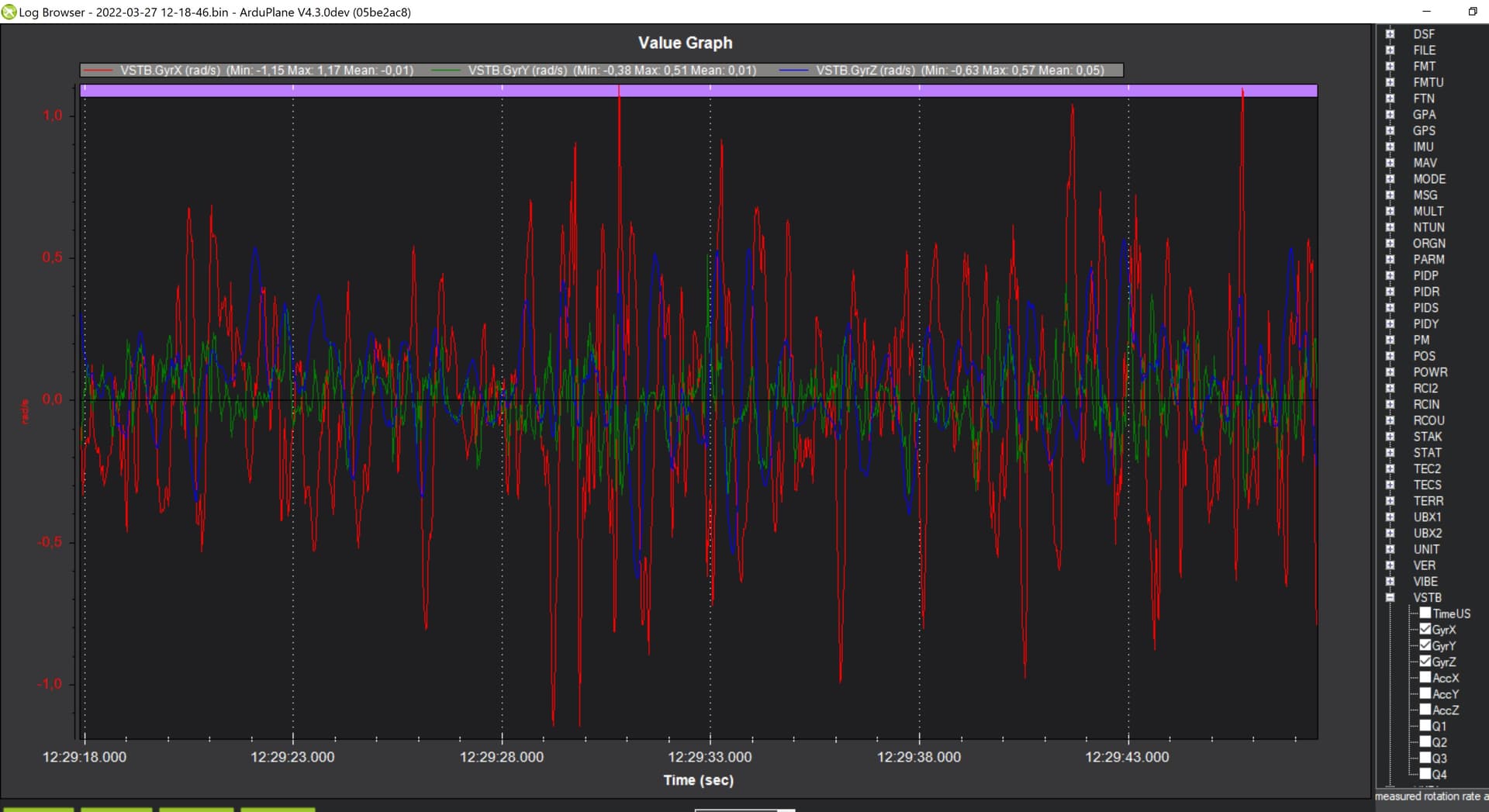
Actually, this one looks pretty manageable. It is difficult to say, however, whether the smoothed trajectory will still satisfy you, but there does not seem to be a lot of the high-frequency noise.