Thanks to detailed guidance from @Leonardhall, @Andyp1per, and more people, my drone flies great! The garmonic mark and pids are tuned, the noise is very low, the copter is stable up to 5ms and descent 10 ms. Good accelerates at speeds up to 20 meters per second.
And there is only one problem. During takeoff and landing, when the props spin up or slow down, the copter shakes very much. How to remove this huge shaking at the start? Once the copter takes off from the ground, everything is perfect! This problem only in start or stop motors!
Here are the settings and a short take-off and landing log. Any help and ideas would be greatly appreciated.
https://drive.google.com/file/d/16CzHLkboC6qQVK-4H6RIrqoOjT5j5br7/view?usp=sharing
https://drive.google.com/file/d/1MCRD2PbrJpwP6Zvl3pHs6zxE7Ko6OjQg/view?usp=sharing
quadrocopter
24inch props
6700gram takeoff
The links are protected so we cannot get the files
Post a video so we can see what is happening…
Posting a detailed parts list will also help.
https://drive.google.com/file/d/1MCRD2PbrJpwP6Zvl3pHs6zxE7Ko6OjQg/view?usp=sharing
https://drive.google.com/file/d/16CzHLkboC6qQVK-4H6RIrqoOjT5j5br7/view?usp=sharing
Sorry, the links are open.
For spare parts, this is a
24-inch quadrocopter
6700 takeoff,
pixracer flightcontroller,
esc no-name,
homemade carbon frame
Video- later
This is a bad idea with a larger copter. What motors are you using?
These are homemade regulators and motors. The motor is about 60 kv, for operating voltage LiIon 16S.
I am not new to building and configuring copters, but my experience in arducopter is not as great as that of many forum specialists, but I can distinguish a well-configured copter from a poorly configured one. this device after reading me this forum flies perfectly! Retention, positioning accuracy, wind resistance with and without payload-EXCELLENT! The only problem is the large vibration before lifting off from the ground.
If you reduce the pid, this vibration will disappear, but the copter no longer flies as accurately as with high PIDs.
What flight mode are you taking off in?
If you are using folding props they will shake until they straighten out?
@asw2000 something that worked for me was reducing mot_thst_expo and then setting Mot_spin_min slightly higher and then recalibrate esc from within mission planner. My take off vibration was gone. But I should mention in my case I set mot_thst_expo at 0.
https://ardupilot.org/copter/docs/motor-thrust-scaling.html
Please check more details regarding thrust expo and set it according your esc and motor configuration. Since its in-house motor and esc you should have your thrust curve and details and you can have easier time than me.
Checkout this discussion too.
Would love to see your motor and esc design too
Ah, OK. When most say No-name ESC they are from eBay or Alliexpress , $4 ea and wrapped in red or yellow shrink tube…
I’d be nice to see a .bin log from flying around smoothly in AltHold too, at least a couple of meters altitude.
According to the tuning guide there’s some parameters you should set differently.
Two in particular stand out:
INS_GYRO_FILTER,20
MOT_THST_EXPO,0.77
I would definitely set those to begin with, and I would also set these:
ATC_RAT_PIT_FLTD,10
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,10
ATC_RAT_RLL_FLTD,10
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,10
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,10
You Rate PIDs look a little odd to me but they might be good for your aircraft too…(see my final comment below)
These do look a bit high though:
ATC_ANG_RLL_P,9
ATC_ANG_PIT_P,9
ATC_ANG_YAW_P,9
I think I’d drop them back to about 7 and see what flight is like then. I’m basing my guesses from the attitude graph:

Desired pitch and roll is nice and smooth, actual pitch and roll is all over the place.
I would definitely also set these:
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
For your thrust expo experiments, you can follow this guidance from Leonard Hall for setting and testing MOT_THST_EXPO
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
And once everything is a bit more stable, run Autotune - it works well even on large heavy aircraft.
Guys, thanks for your help!
I answer in order-
- The props are not foldable.
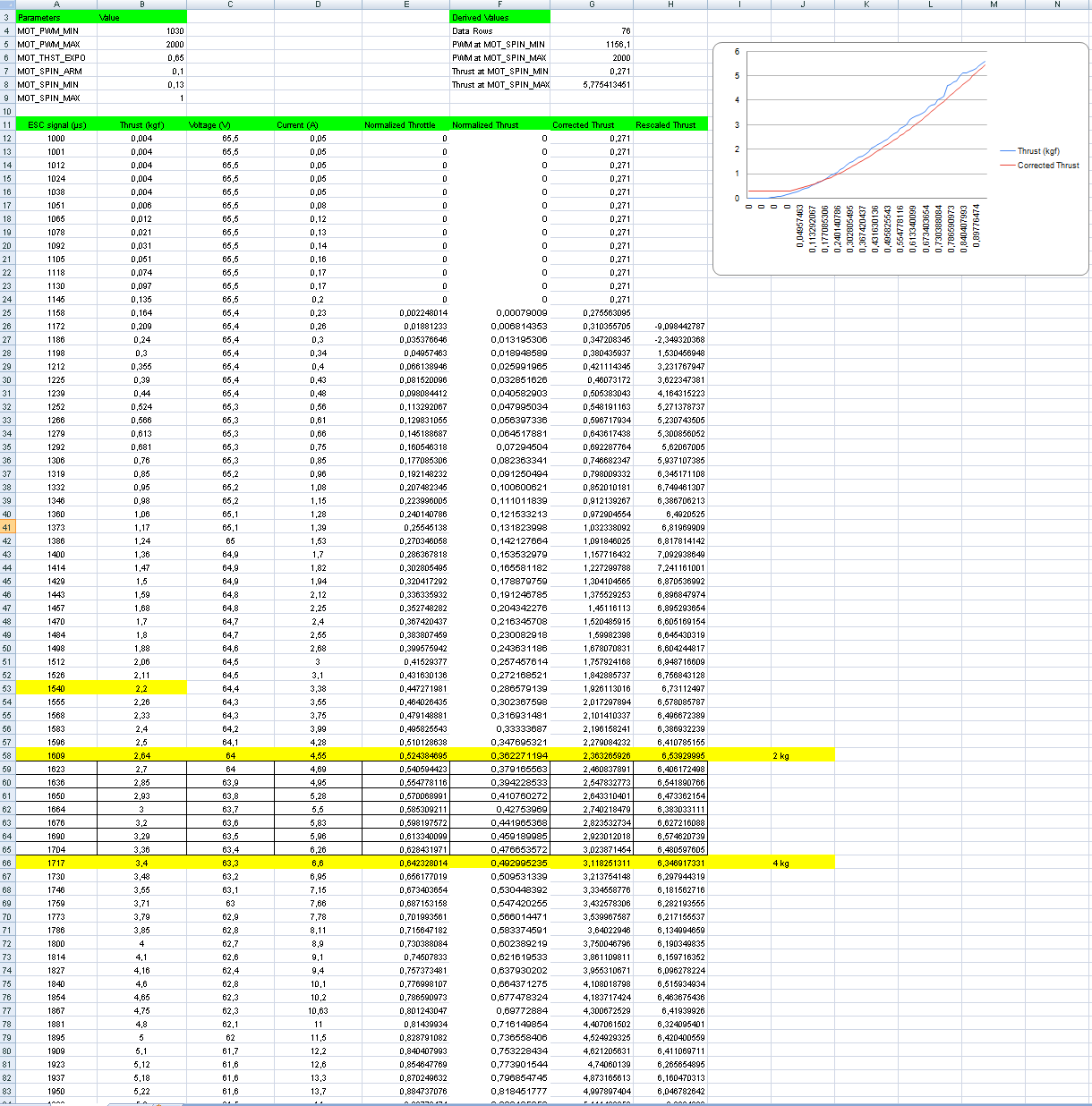
- I tested the motor-prop -esc at the table-stand. The result is in the table
.
With mot_spin_min value - 0.15, the copter is less stable when descending -10m / s - After changing the values of MOT_SPIN_MIN and MOT_EXPO, you have to do all the PID tuning again. On the hover, the values can be adjusted so that the copter hower perfectly, but on other copter MOT_SPIN_MIN and MOT_EXPO are not so stable at a decrease of -10 ms and acceleration to +20 ms. Changes in these characteristics do not affect vibration before lift-off, but poor performance over the entire speed and load range. My conclusion is that the reason for vibration on takeoff is not MOT_SPIN_ MIN or MOT_EXPO
It would be very interesting to know the physical meaning of the filtering values.
ATC_RAT_PIT_FLTD, 10
ATC_RAT_PIT_FLTE, 0
ATC_RAT_PIT_FLTT, 10
ATC_RAT_RLL_FLTD, 10
ATC_RAT_RLL_FLTE, 0
ATC_RAT_RLL_FLTT, 10
ATC_RAT_YAW_FLTD, 0
ATC_RAT_YAW_FLTE , 2
ATC_RAT_YAW_FLTT, 10
I think that the reason for the large vibrations of the props before taking off from the ground is in the inaccurate setting of this filtering parameters.
P.S. this vibration is absolutely independent of the mode - LOITER or ALT_HOLD
during the start - vibration, immediately after take off - ideal flight in all modes and loads.
Shot a short video of the vibration of the props before takeoff and after landing. Follow the links for the log and parameters of this short flight.
https://drive.google.com/file/d/1DJ3Wp66-F9hEQI23Q4cvQDzliv4qZpbM/view?usp=sharing
https://drive.google.com/file/d/1RYvwEzTtzBSvxeV77Jh5QU5M5dWDngn8/view?usp=sharing
Really, no one has encountered such a behavior of the props and no one knows what causes it? Any ideas would be grateful.
Looks like ground resonance to me, stiffer/different landing gear should fix. Maybe you could share a picture of the gear. Quite common in big copters, the general advice is not to hang about on the take off and landing.
The alternate fix is to reduce gains until it goes away, but that will reduce your inflight performance.
Access denied to those files.
Also have you tried the parameters I suggested, particularly these:
INS_GYRO_FILTER,20
MOT_THST_EXPO,0.77
and lowering these to about 7
ATC_ANG_RLL_P,9
ATC_ANG_PIT_P,9
ATC_ANG_YAW_P,9
That’s ground resonance. Arm the motors and get that thing in the air asap.
To paraphrase Pink Floyd, “Hey Pilot. Leave them PIDS alone.”
Stabilize mode and a squirt of gas 
So, friends, I tested all the ways you suggested …
Vibration on takeoff decreases only if the PID is reduced, but then the copter does not fly well …
You cannot decrease the PID!
Suggested changes - no change the vibration at the start.
If you take off quickly, there is almost no vibration at the start, but this is just a disguise for the incorrect tuning of the flight controller!
I have a lot of experience with DJI A2 - A3 flight controllers. There is absolutely no such problem with them when promoting a similar props.
I still think the problem is in my inaccurate ARDUCOPTER settings. I will continue my research, but I hope for your help with ideas.
Resonance depends on the natural frecuency of the system, and hence on the vehicle stiffness and mass.
Re-check propeller balance. It is not the root case, but it allways help.
Increasing the mass will reduce the natural frecuency. (Maybe bigger battery)
Increasing the stiffness will increase the natural frecuency. I would do that, specially the mount/arm/landing gear stiffness.
Last, you could add a counteract mass, but it is not that easy.
I had a tricopter which behaved very similarly. The reason was simply that the landing gear was not rigid enough compared to the frame.