Hi,
I follow that topic because I have a serious problem related to disarming with AC3.4.
I’m on it since several days and i begin to go nuts!!!
First I thought it was a refresh rate of GPS Issue, but it seems to not. My copter (huge octo, my loved tool for work since 4 years) does not disarm by itself after touching the ground. I always used auto landing, and it cost me a propeller set the first time I flew with AC3.4.
I Upload a log, you can see I wait for disarming (while still in poshold) for 3-4 seconds, then go back to stabilize to disarm manually. Even withouttaking off, if I engage throttle at 10% for making the props spinning, then go back to throttle down, it does not disarm.
Hello, thank you for your answers.
I switch to stab/throttle down immediatly because if I don’t, the props continue to spin, and after 4 or 5 seconds the throttle raise by itself, causing the copter to tip over (I try a new word^^) and breaking 4 props. My thought is that it try to repositionning, and as it is on the ground…
I’ll do another flight today, waiting for the props to accelerate and send the log.
Hi Julien,
This reply is not going to solve your problem, but, have you considered adding the ‘emergency shutdown-mode’ on one of your Tx switches? At least when you see things going wrong on the ground, you can act by shutting down the copter prior to causing damage to the rig. At least, have this option available until you know that your problem has been solved. Maybe I err on be over cautious, but I have my finger on the ‘kill’ switch on landing, just for ‘in case’. To be honest, I normally use the ‘kill’ switch once the copter has touched down. On the other hand, I haven’t experienced the landing-problem that you have described, for me it works,
but I like the ‘emergency/kill/shutdown’ option.
I am getting reports from out operators in the field about this very same behavior! We are running 3.3.3 on an DJI S1000+ with a pixhawk1. Happens right around time 20:54. This is a very very dangerous situation as we have to STAND NEXT TO IT to make sure it does not happen, which is about 1 in 6 landings. No sonar is used currently (it did not seem to help). This appears to be a pressure bubble problem but I can not confirm that. A kill switch is not an available option for us.
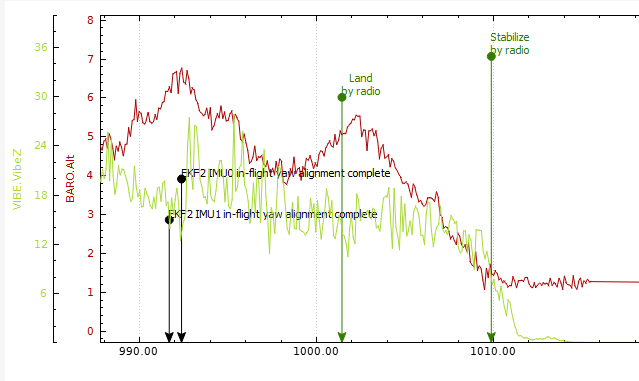
It doesn’t look like the CTUN parameters are in your log file to check actual output throttle PWM values, but I noticed that there are no land detection messages so there may be something inconsistent in your MOT* parameters. I also noticed that your z vibration levels were fairly high, which may be confusing the land detection logic since it looks at vertical motion as well. https://github.com/ArduPilot/ardupilot/blob/master/ArduCopter/land_detector.cpp#L70
One short flight with autolanding, 176126 on log bitmask, as the previous one i leave the octo in loiter/autoland on the ground, then waited for the motor speed raising to switch to stab.
Just had a quick look through the land_detector code.
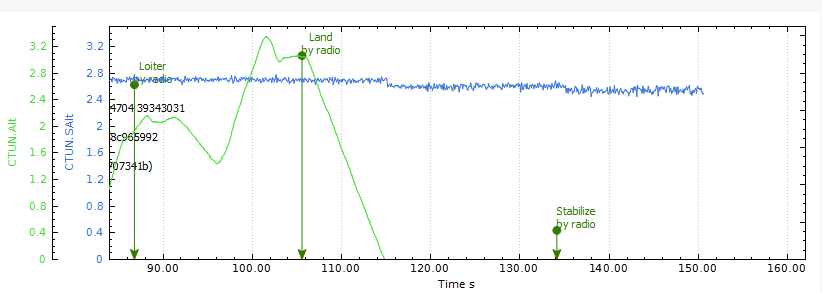
If you have a rangefinder, landing detection only works if the rangefinder is reporting an altitude of less than 2m.
// if we have a healthy rangefinder only allow landing detection below 2 meters
bool rangefinder_check = (!rangefinder_alt_ok() || rangefinder_state.alt_cm_filt.get() < LAND_RANGEFINDER_MIN_ALT_CM);
As your rangefinder is always reporting ~2.7m, the landing detection will never run.
Thanks for analyses, i never carry about sonar/rangefinder param since i removed the analog one 2 years ago… I think you gave me the answer, and will confirm that tomorrow, I planned a testing/tuning session. It’s just strange that this issue appeared only with 3.4 upgrade as I didnt changed anything relative to rangefinder since a long time.
For the motor spin, I put 0 to have a static props when landed. As it is high on it’s legs with batteries on top and good power set up, a little thrust+wind could make it fall. With that “no disarm” issue, i’d rather totally stop the props when throttle down/stab mode.
OK, Issue Solved!!!
I’m a bit shamy, because it’s a simple case, my sonar range parameter was on “enabled”, with all relative parameters set. Everything is fine now…