So after a crash, I started flying a larger quad again, and in RTL, LAND, and in AUTO with a land waypoint I have seen it touchdown, but not disarm the motors. I then added a Lidar to the system (a landing bounce caused the crash and I thought this would be a good way to prevent this). I am still seeing this situation where it doesn’t disarm, and I have to disarm manually.
Anyone encounter this, anything in data I should be looking for?
This all worked many many times over prior to the crash, and I don’t think anything else has changed. Other than this, its flying fantastically. I have read the several similar threads and I haven’t seen any thoughts, should I bring this up in the 3.5 testing thread? I assumed it was more generic because of the success I did have.
What flight controller and where/how is it mounted? Is the final descent slow and stable, or rocking around and shaking? Landing detection failure is most often caused by unstable or rough descents to the ground or too much vibration. Both of which throw off the accelerometer Z axis. If the flight controller is in a location that get heavy prop wash off the ground, that will throw it off too. It can compensate for that to a point, but aforementioned Z axis interference defeats the ability to compensate.
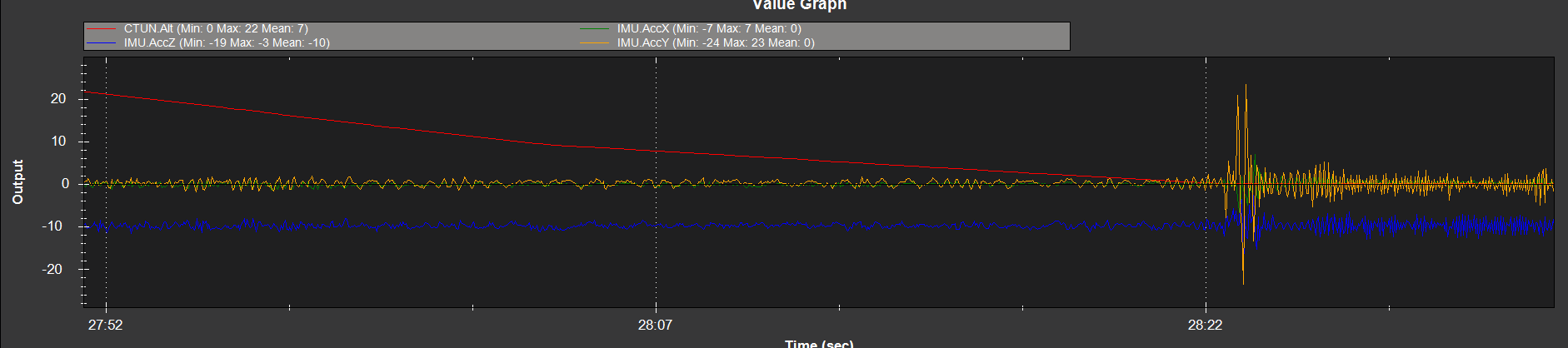
The descent was very stable. The Flight controller is a PX4, its mounted in like a body that is open to the air, on a 3D printed vibe mount. Here is the descent altitude and accells as it approaches the ground. When I started trying to fly this I had some Vibe issues, but this looks like really decent data to me, with a clear touchdown. The vibrations after are motors spinning until I managed to manually disarm it.
I’ve been going through the land detect code, By all accounts, I think that this data says it should have detected landing.failedLandDetect.BIN (1.5 MB)
So think I see the problem. It appears that after touchdown the vibrations are actually worse, and the end result is that it sees spikes greater than 1m/s/s and that prevents the landing detect, does anyone wanna look over my shoulder and give their opinion.
So think I see the problem. It appears that after touchdown the vibrations
are actually worse, and the end result is that it sees spikes greater than
1m/s/s and that prevents the landing detect, does anyone wanna look over my
shoulder and give their opinion.
Any chance you can point to where in Mission Planner to select switch disarming? Coming from flying mini-quads I would like to have this option.
One other benefit is if by chance the copter tips over when landing, especially in one of the Auto flight modes, in the 2 seconds it takes to disarm the copter continues to try to stabilize. I’ve blow out ESCs and motors because the prop is stuck in the ground while the FC is still trying to power up motors to lift up the side that tipped. (That’s my theory at least!)
I think having the ability to instantly kill the motors with a switch as soon as it tips would help resolve this problem.
The CH7 and CH8 pull downs have a “Motor Emergency Stop” I think that is what he is referring too. Personally I’m not a huge fan because there are certain modes and stick positions where, depending on your disarm time, the motors will re-start if the switch flips back. You can also switch to stabilize and 0 throttle to shut them down fast. Don’t get me wrong the emergency stop is a decent option.
Thanks! I’ll have to try that out, and yeah I’ve almost made it a rule to bring it down in the auto mode and switch to stabilize for the actual landing.
The landing detection and disarming is the same in any mode that uses altitude hold. So Alt Hold, Loiter, Position Hold, Auto, Guided, Sport (I think), RTL, and Land. In these modes, it detects landing when the throttle output is at minimum and the vertical rate is stopped (+/- a number I forget) for more than approx 2 seconds. If you’re landing by hand in these modes, all you need is the throttle stick down so the throttle output goes down. Holding the throttle stick down and left does not affect disarming or landing detection in these modes. You cannot force it to disarm in these modes. If it doesn’t detect landing, it will not disarm.
Throttle down and left forces disarm in Stabilize, Drift, and Acro since those modes do not use the altitude hold controller. Therefore you can get around a confused landing detection in these modes.
Remember, I said stick left doesn’t affect it. It doesn’t make it not disarm. It just has no consideration in the matter. You can put the stick down and left, or down and right, or down and wiggling. The landing detection works the same. You’re putting it down and left and seeing it disarm, but it’s disarming because it’s down and it passed landing detection. Nothing to do with it being to left also.