Ok, that’s good. For RPM, you can do a quick check that everything is working correctly on the autopilot: unplug the rpm sensor from fc and momentarily plug M2 signal output into it. You should read the servo frequency on RPM1.
Insert rpm directly into M2, do we need the positive poles together? Which parameter is used to read the frequency when the other wires are unplugged?
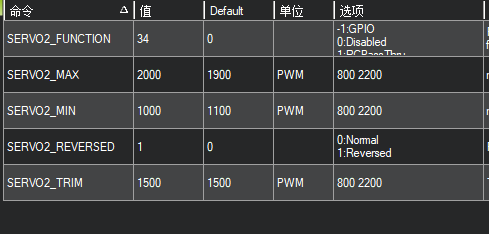
Is it the SERVO2FREQ parameter? Or other methods?
No. Unplug Rpm cable.
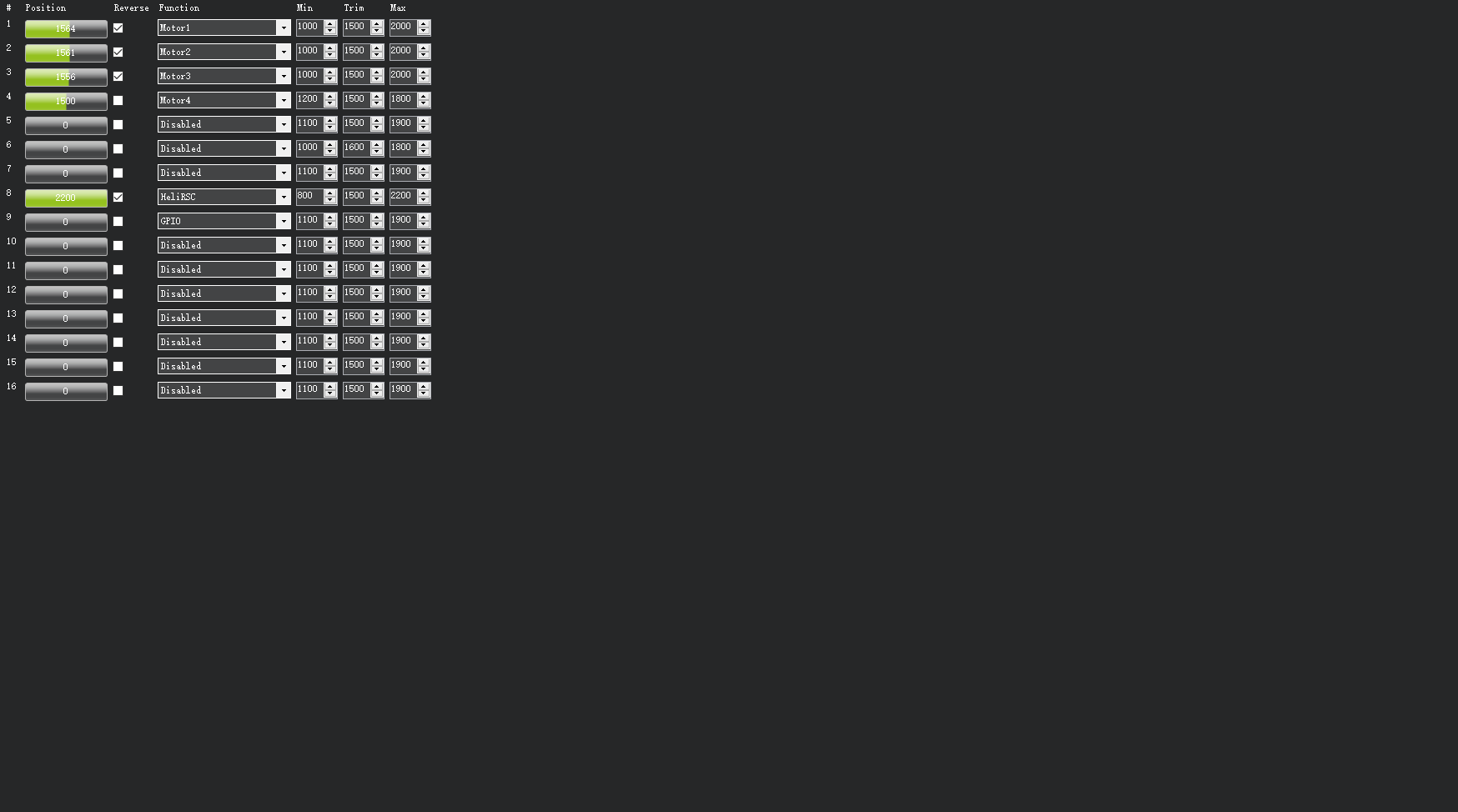
Just Connect M2 signal pin to M9 signal pin.
Then check if in MP you read something on RPM1. Don’t change any parameters.

Can you post your current param file.
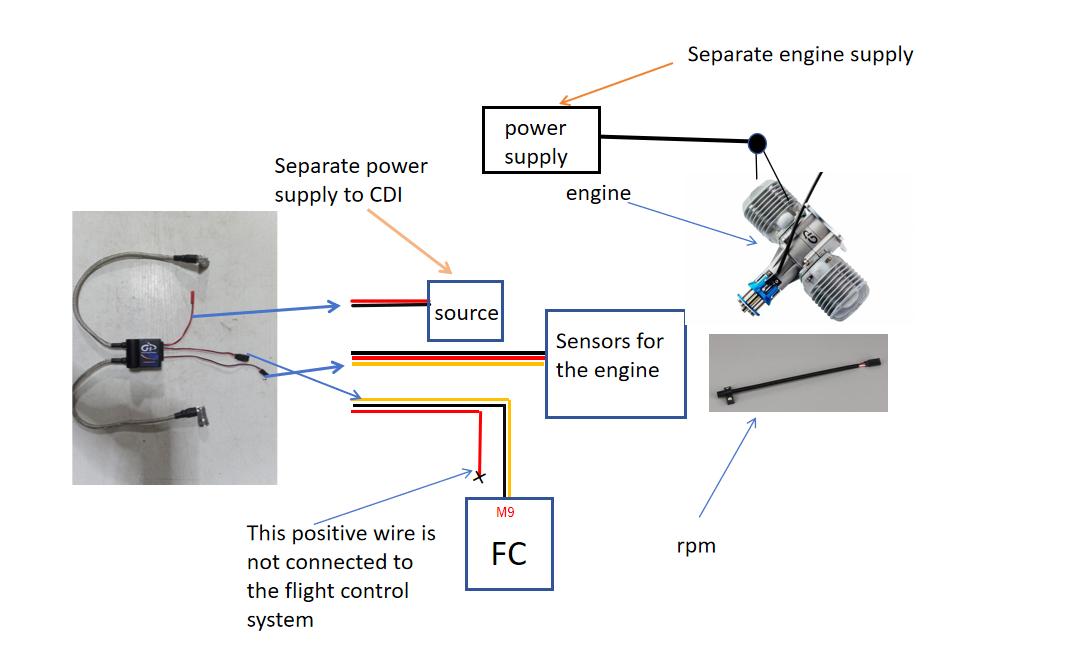
For me still the CDI and its connections are not clear.
- Connection source is just a electrical power source from a battery or BEC ?
- Connection to RPM sensor is for timing of the ignition ?
- Connection to FC is the control port of the CDI to regulate the speed? If yes, is this bidirectional writing and reading the CDI? Or is it only reading of the RPM. In that case how is rhe motor speed controlled.
- Did you test as @Ferrosan asked you just only to connect FC signal pin M2 directly to FC signal pin M9. What was the result.
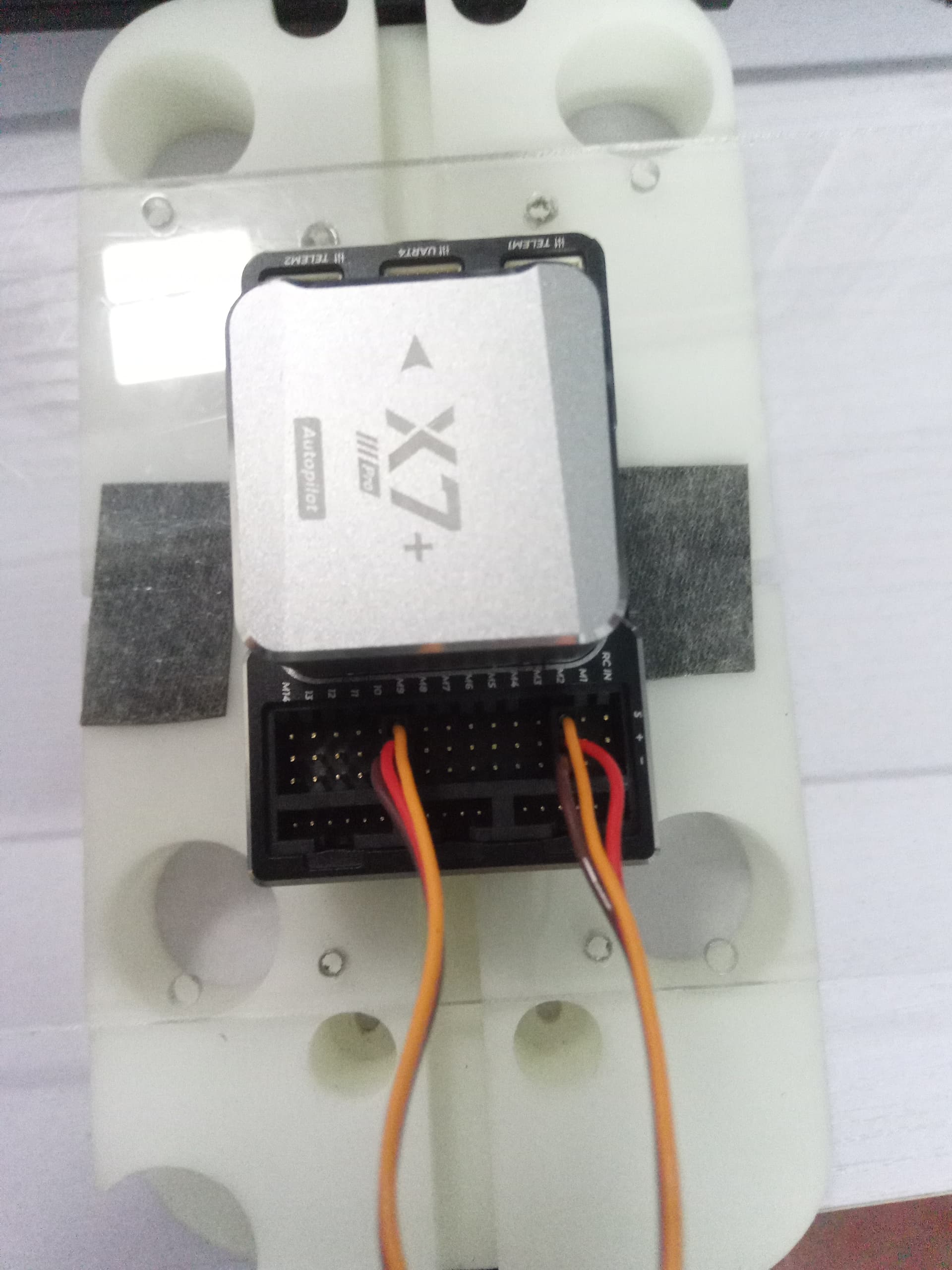
Hello, is it like this when inserting the M2 pin into the M9 pin? I may have misunderstood yesterday

Hello, this is the igniter I am using
This one doesn’t have ESC,I am also worried whether this CDI can connect to FC and recognize the speed sensor,
If on your first picture only one cable from M2 to M9 is shown than yes this was asked be Ferrucio.
A picture with no detailed information of your CDI is not helpful. A datasheet or manual is needed. On the homepage of Great Power Engine I cannot identify your CDI.
If the CDI is not controlling the speed of the motor, how does it work than?
So I think it must be controlled over the cable to FC and in that case the signal is either a PWM or a other standard protocol used in RC-aircrafts but not only a RPM sensor signal.
Hello, this is a recent data file
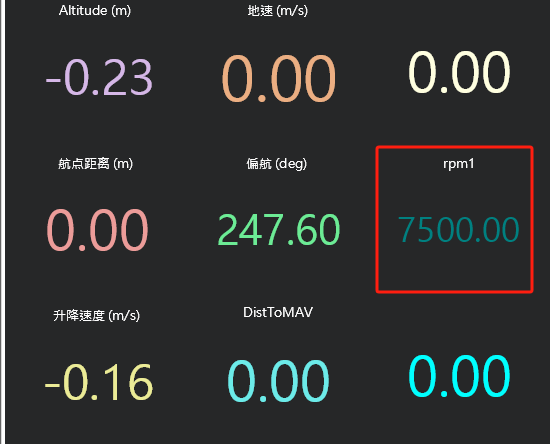
I inserted the M2 signal output into M9 and it shows 7500
Okay, thank you for checking my issue with the flight control output line. I just tried and found that the M2 output port is inserted into M9, and there is a numerical value appearing
I’m sorry, I only have the engine manual here. The igniter should work on triggering and discharging, energy storage, high-voltage generation and ignition, and ignition advance angle control. This is my understanding. As for the DuPont wire output connected to FC, I think it should be a PWM signal, which is just speculation. This is also my first time in contact with it
@zhangduangduang ok so we can rule out the fc now, it’s correctly set. What you are reading there is the servo frequency (125Hz) x 60.
As to why the engine won’t start its a bit difficult to debug from here. If the sparks are working and fuel coming to the engine you should at least hear a bit of sputtering from the engine. Have you tried adjusting H_RSC_IDLE a bit?
Finally, if the fc is not reading rpm from the sensor you should analyze the signal coming from rpm sensor with an oscilloscope.
I saw in the teaching video on the official website that setting the parameter to 0 is necessary to set other parameters?
H_RSC_IDLE Can’t the parameter be 0?

I have looked at the explanation of the MP parameters, is setting 0 for an electric helicopter? How much do I need to set for my oil powered engine?
Which instructions are you referring to? Set it at 10% for a start. Remove main and tail rotor blades and perform start up tests. Ideally the engine should idle reliably without the clutch engaging. Adjust H_RSC_IDLE accordingly.
Okay, let me give it a try first. There’s a question. Do I need to give some throttle value to the remote control lever when I unlock it, or do I need to keep the remote control lever pressed all the way down, and adjust the value in the MP’s HYRSC.IDLE? I gave a little throttle to the remote control after unlocking it earlier
@zhangduangduang it doesn’t really make a difference, since the flight control is in ground idle state the output to the servo will always be H_RSC_IDLE, regardless of the collective position.
The throttle servo will move along with the collective only after you switch motor interlock (CH8 on your radio) to go into flight state.
Hello, I just tried to change the parameter value of H_RSC_IDLE from 10 to 50, but the rotor head still cannot rotate. After checking the MP value, rpm is still -1.Should I inspect engine components, including sensor issues?